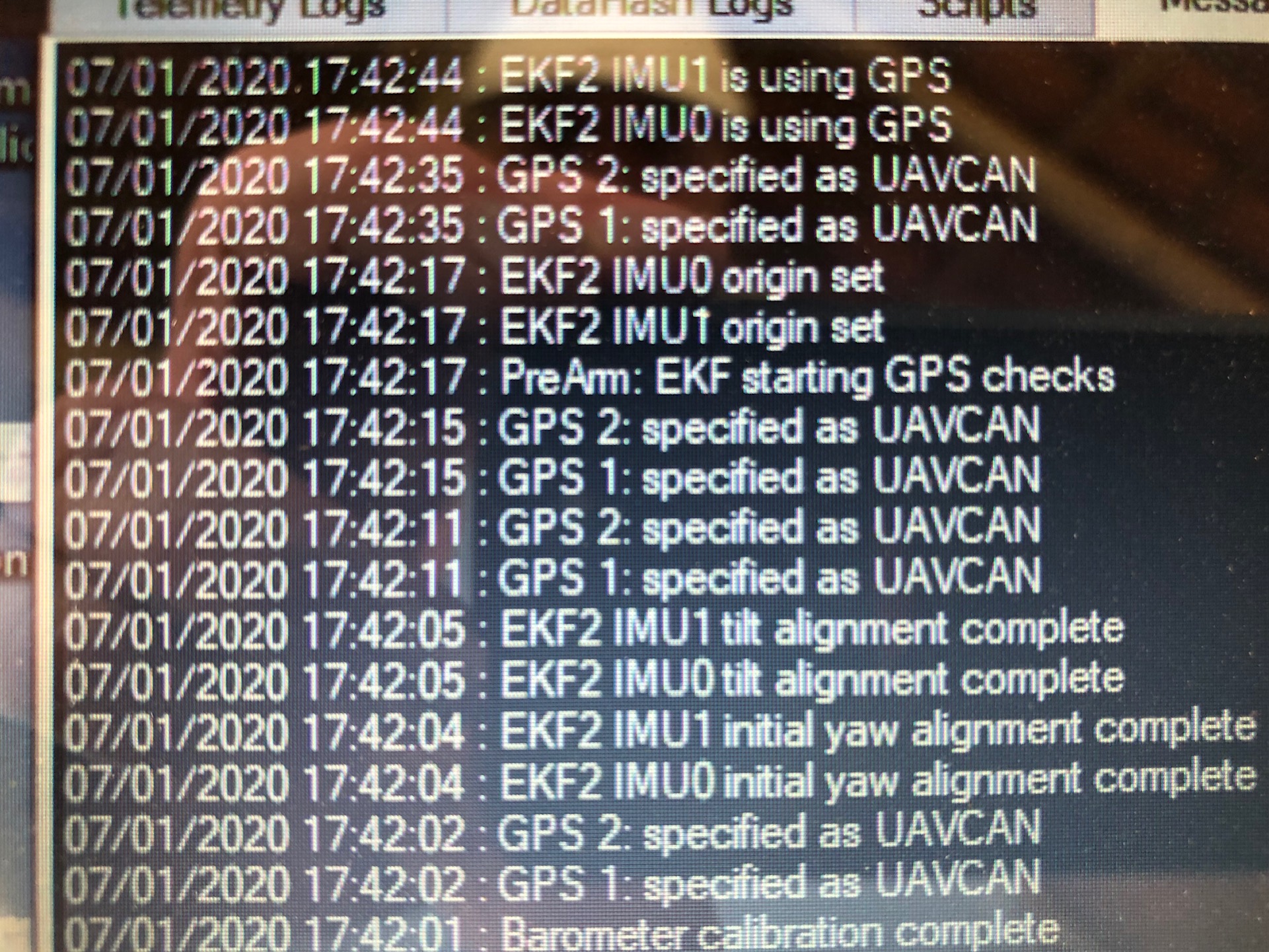
I´m facing a Here2 reset problem. This is occurring on 2 new builds using arducopter 3.6.12 (we made 4 builds and 2 seem to be OK). I´m using 2 power supplies and a 2 GPS setup. I´m not sure if the Cube Black is resetting or only the GPS. What should I look for to know if the Cube is resetting or what is causing the 2 GPS Here2 CAN to reset? I don´t believe this is a power issue since the CAN extension rail where I connect the 2 GPSs has 5.4V. I already checked cables for contact problems. Below a Message print where the reset is documented.
I dont think it would matter, but are you trying it indoors? Try setting your GPS_TYPE and GPS_TYPE2 to 9 instead of 1. That should set it to UAVCAN instead of Automatically detecting it.
Thaks for the advise, but we have 2 units flying (outdoor) and all the CAN settings are OK. You can see that CAN GPS 1 and 2 are detected many times (resseting by itself).
I´m trying now with only 1 GPS CAN to see if it gets better.
On GPS is set to address 124 and the other 125.
Understood. I’m just wondering if AC is finding it on UAVCAN, then oddly trying to reconfigure again.
I left the 2 builds working with only 1 GPS CAN each for 2 hours and there was no reset. I will test further and post the results.
Please let us know your findings.
After this afternoon my results: Out of 4 builds, 3 ended up with only 1 GPS (very stable, no reset whatsoever). Only one build was able to maintain 2 CAN GPS (address 124 and 125) without any reset. It seems to me like a hardware/firmware issue. I will test one problematic build using Arducopter 4.0.0 witch has dynamic address allocation and other CAN improvements. I also noticed at GPS 1 (address 124) on the builds with problems that the status leds had a very uncommon behavior. At boot (when the blue light goes on, there were “green” “noisy” blinking on the 2 status leds from the GPS. Like an electrical signal noise or bad contact. But funny that this only happened on GPS 1. I switched the cable and connectors but the behavior did not quit. With only 1 GPS (I left address 125), no problem.
A feedback after finding the issues. We had problems with the power supply that was sending 5.8 to 5.9V causing a strange instability behavior on the CUBES and HERE2 GPS. After exchanging the power supplies for ones that deliver 5.5V (5.2 on the CAN rail), no more reset. Before changing the power supplies, I used the Arducopter 4.0.0 for testing. Same resetting behavior until fixing the power supply.
Using 4.0.0, I noticed that even having automatic CAN addressing, it is wise to manually set the compass a address on a 2 GPS setup (I used 124 and 125). This is because the GPS who boots first (and they do boot different), gets the lower address and also gets the Compass function. If you do the compass calibration for one compass and at boot happens to “wake up” the other compass first, you must do another compass calibration for the second compass. Kind of unpredictable…