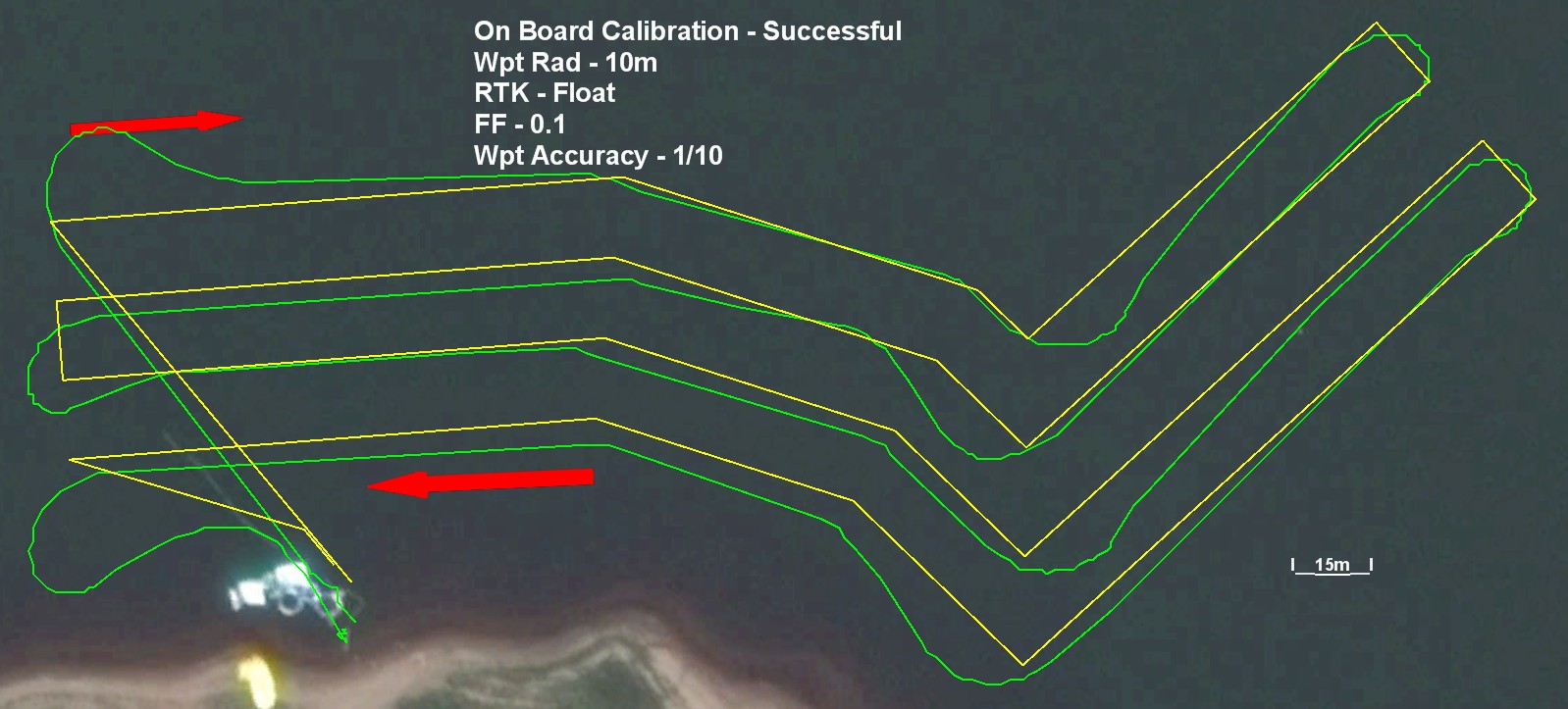
From this test done yesterday, I can assure you, just normal GPS is WAAAAAAAY more accurate -
Dear John,
I am new to this.
Do you mean that you get worse accuracy with the Here+RTK than with standard GPS?
Can you explain the screenshots? Which of the projects are using the Here+RTK, which are using normal GPS?
Sincerely,
Wiktor
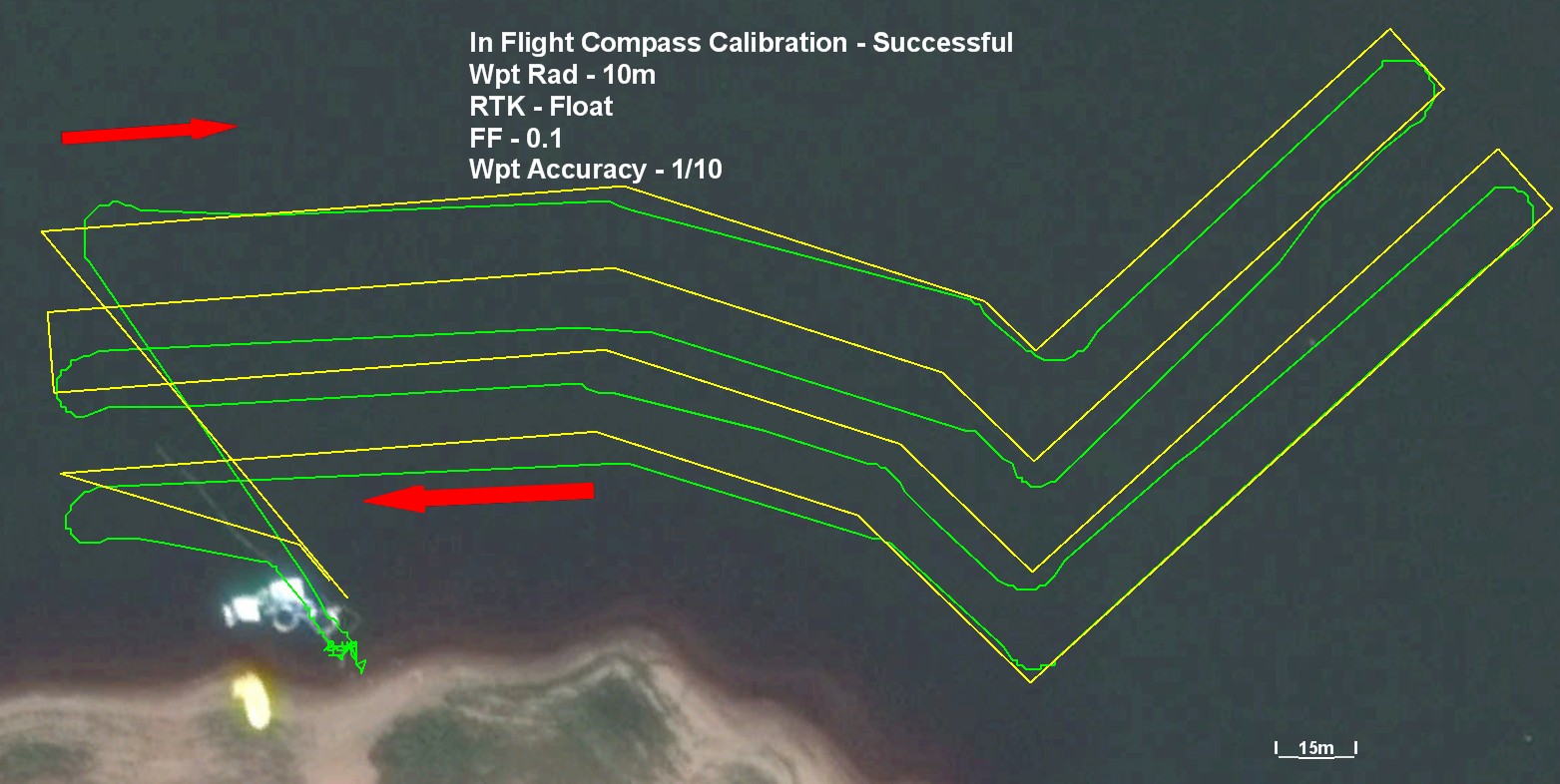
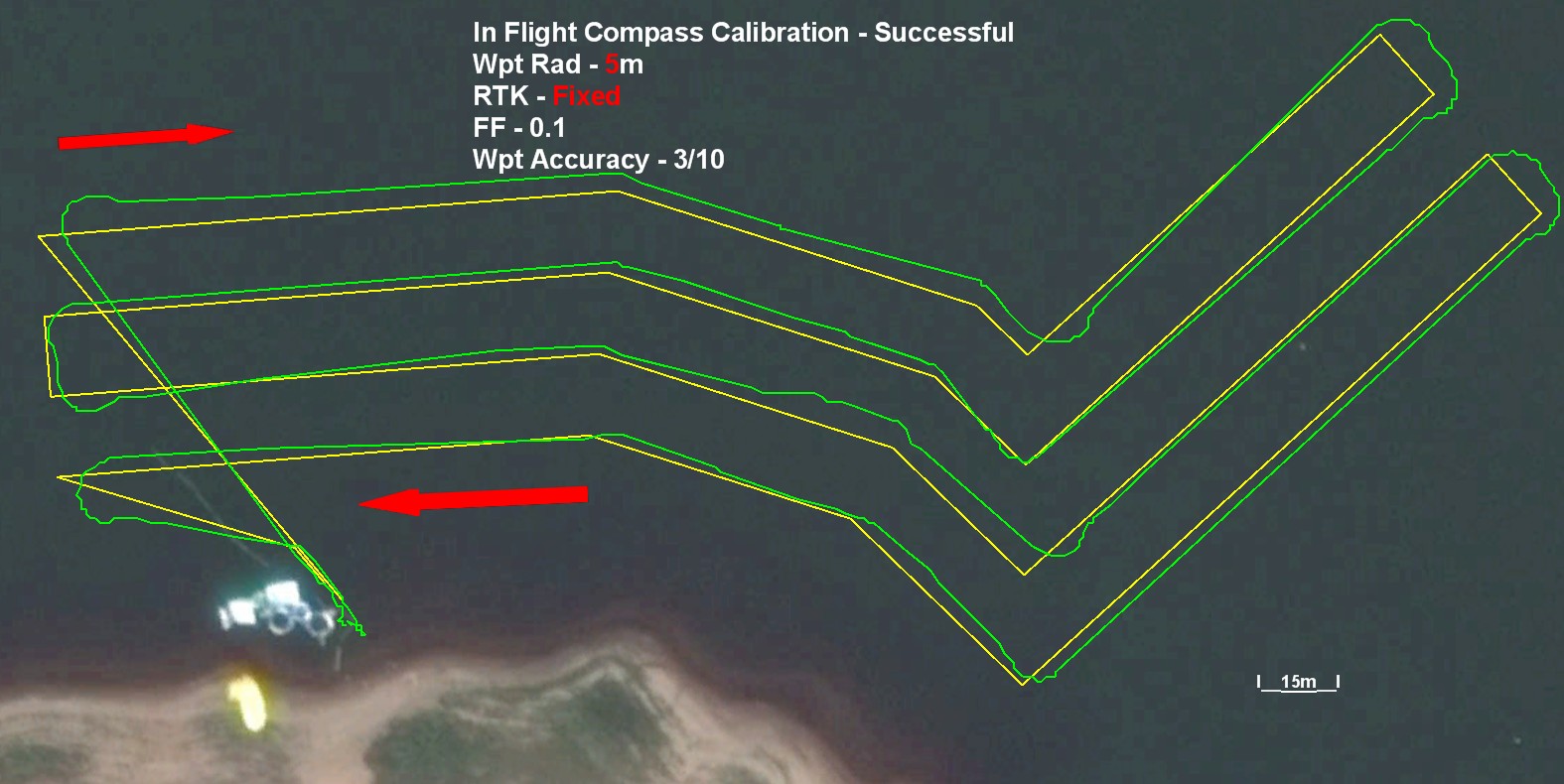
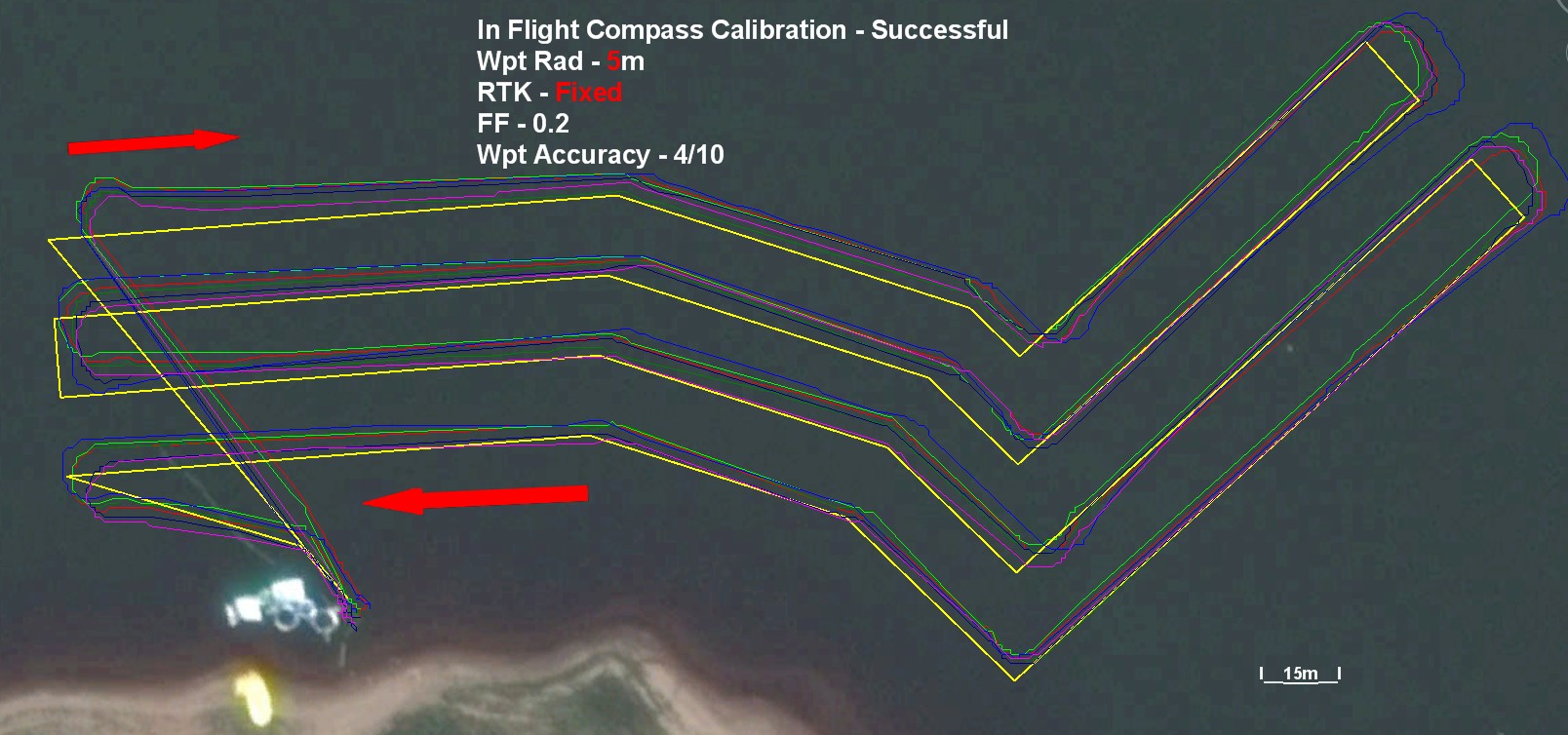
All of the above are using RTK, I will return later in the week and do the same flight plan with GPS only.

Hello John
Seems to me that you have some deviation at the beginning of the run? We are running a similar project with 4 meter long boat driven by two brushed electric motors. We have tested the autopilot system, however, we are experiencing difficulties when trying to reach a waypoint. It seems to be stuck in one direction only (180 degrees away from the waypoint). If we force it (by hand) in the correct direction (turning it 180 degrees) it continous on the correct path. Do you know what does this? Is there a latency in the system?
Hi Thomas,
Sorry but I only have experience with single outboard drive motor.
Hello again,
what parameters do you need to fiddle with to make the boat follow the directon so nicely as you have achieved? We are reaching each waypoint, but the boat does a big curve from one to another. It is not following the line that it should. Any ideas what could be fixed?
Thomas, this is very tricky as I have two identical craft and yet the settings are completely different.
Here is an example of one of my craft:-
Steering Rate
P - 1.0
I - 0.2
D - 0
IMAX - 1.0
FF - 1.0
Speed 2 Throttle:
P - 0.2
I - 0.2
D - 0.0
IMAX - 1.0
ACCEL - 2.0
Navigation:
WP Speed - 3.5
WP Radius - 7
WP Overshoot - 10 - (003 seems to be set on 0 - just check this)
Turn G - 0.4
Period - 6
Damp - 6
Throttle:
Cruise Speed - 3.0
Cruise Throttle - 30%
Min % - 0
Max % - 60
Turn Radius:
15m
Thank you again for your speedy reply. Our boat is 4.2 meters long and it weights about 200 kg. Are the parameters that you sent similar to this boat?
This is the design I have come up with as nothing else out there even made any sense for my application.
2 Likes
Really nice project John! A much nicer looking setup as we have. We are constructing a near-surface aquisition vessel. We need alot of power and batteries to make it last with a lot of weight. We had a successful (or close to perfect) test yesterday. We got the vessel to follow a survey pattern, some latency when trying to turn to the left (maybe due to the wind). However, there are some problems with the compass. I dont know if you had a similar issue, it seems to have difficulty finding its position. I will try and send you a video of the test.

Great job on that craft Thomas!
I have had compass problems right from the beginning and only recently found a fix - try the compass learn parameter, that definitely helped me.
I really look forward to seeing your ‘near surface’ craft as I too am working on the design of a semi submersible craft for when the wind gets up
Thank you John.
We will definetly try that, hope it will benefit us as well, and thank you for the valuable tip!
Yes, we hope to have our first, fully equipt, survey next week. Looking forward to hear about your plans! How much weight do you plan to have on it? And what will be its propulsion?
I plan to have flooded compartments to control buoyancy and it will be powered by a Yamaha 8Hp long shaft four stroke outboard motor.
Sounds like an exciting idea!
I have a question regarding the compass learning parameter. There are 3 options: Internal learning, EKF learning or InFlight learning. Which of these options did you use?
#3 - In flight Learning, but you must drive it in straight lines for a while, then do a 90° turn, and repeat for fill 360° or more until the Compass error disappears - you can also monitor the messages tab to see if it is working
Ok, thank you so much will try that this week.
Hello John,
Is it possible to only use the Here+ GPS for navigation and heading? We have a lot of equipment and the compass on the Pixhawk cube is unreliable. What parameters do we need to change and to what?