I have an original 3dr pixhawk (not v2.1) and I am running rover (latest firmware) I am attempting to run the Here+ rtk system but am having some issues
first it does connect and acquire satellites Ive seen as many as 17. Also I am able to set the ground station location with mission planner.
But. The arming switch does not work and the Compass does not work mission planner does not detect a 2nd compass. Rotating the Here+ rover side puck does not show a compass change. I have both compass 1 and 2 selected in mission planner but only the internal pixhawk compass is recognized.
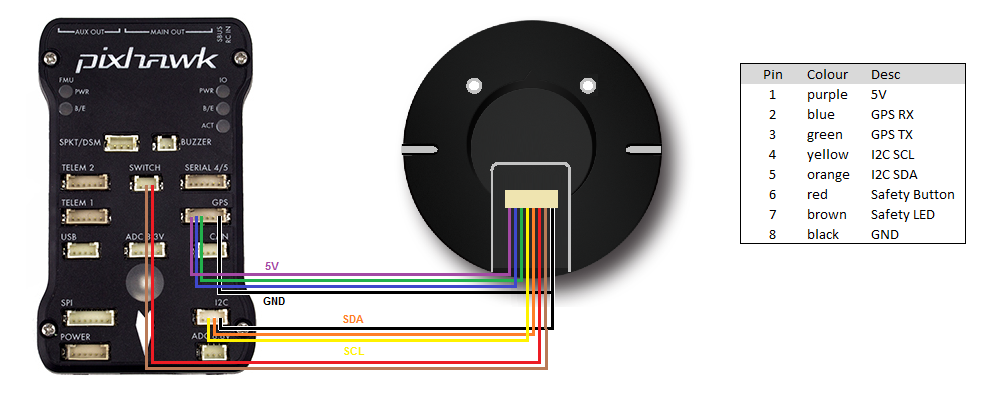
Because I am using the older pixhawk I had to switch to df13 connectors. I followed the pinout as shown in this link
I got it figured out. The colors did not match the pin count as described in the article. (the above photo) they were switched at the factory. I used pin count and it seems to work just fine now.
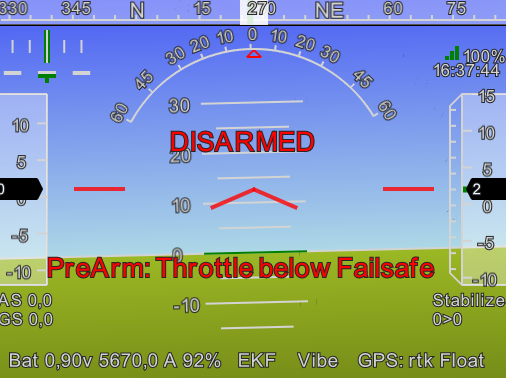
Im 99% sure my rtk is working. I set precision in mission planner say 1.5m and let it acquire points until precision is equal to that value then it automatically locks the base location. I then click save and give it an name. I then click “use” button and I can see the base station located on the fight data tab as a blue marker.
However GPS, GLONASS, and Beidou never turn green for me. So to check I had the rover navigate a tight course between cones it did this quite well over and over again. I then moved the base station several meters to the south and immediately the rover diverged from course and was following the same path but offset to the south several meters. This seems to indicate that RTK is working.
I would like to know why GPS and GLONASS are not green. Its indicating 17 sats on the flight data tab with 3d lock but I see non of this in the inject menu.
As for no getting a base station lock make sure that the right panel shows accuracy equal to what you set in “surveyinAcc” if you set .5m and its still .8m it wont lock the base station
I did not upgrade any firmware
I dont recall there being any rover side settings to adjust for use with RTK
Hi, I’m having a similar issue with the HERE GPS (non +) connection to Pixhawk 1 (not the cube). I wired as shown in the picture you posted (and the only picture I could find in the rest of the internet) but no compass or GPS functions work. The only thing that does work is the saftey switch - and no LEDs even. Could you share how you ended up with your wiring to the Pixhawk 1?
my here+ compass is not working when connecting it to pixhawk cube. Moreover when it is connecting to cube it is not allowing even internal compass to get calibrated. i reflexed the fitness even for calibration but all in vain.