Here flow settings refer to the following URL: Optical Flow Sensor Testing and Setup — Copter documentation
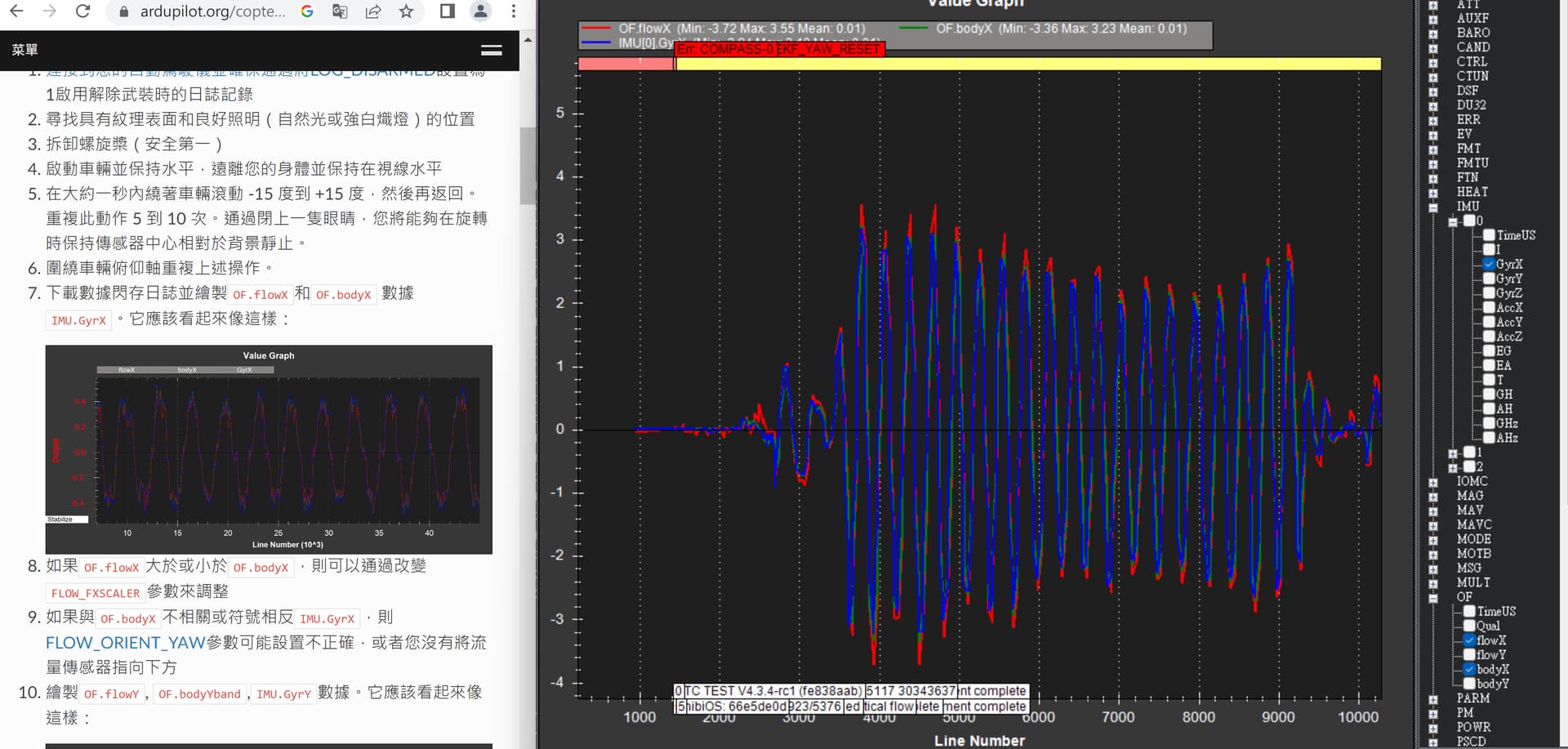
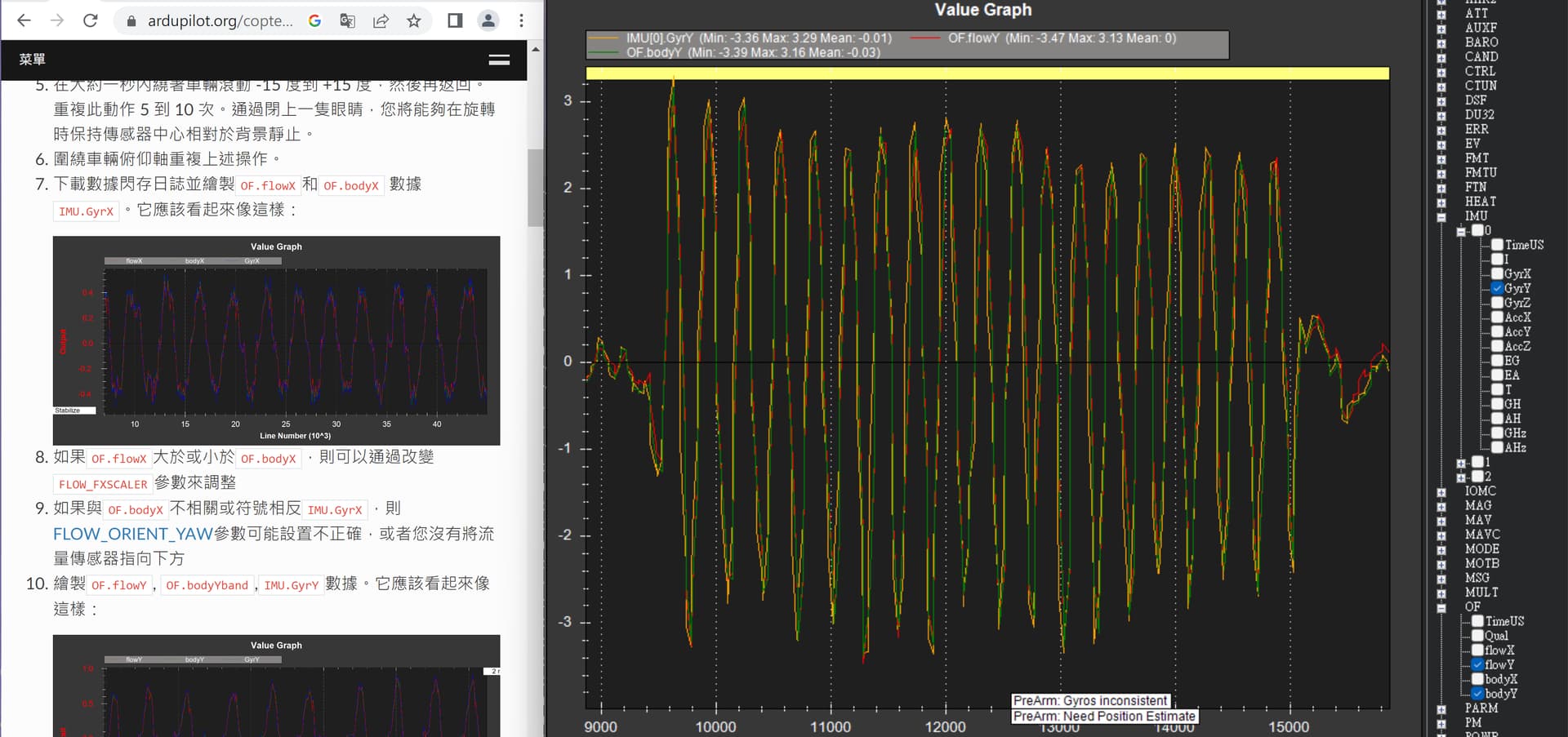
The result of Calibrating the sensor is shown in the figure below
The result of First Flight (stablize flight) is shown in the figure below
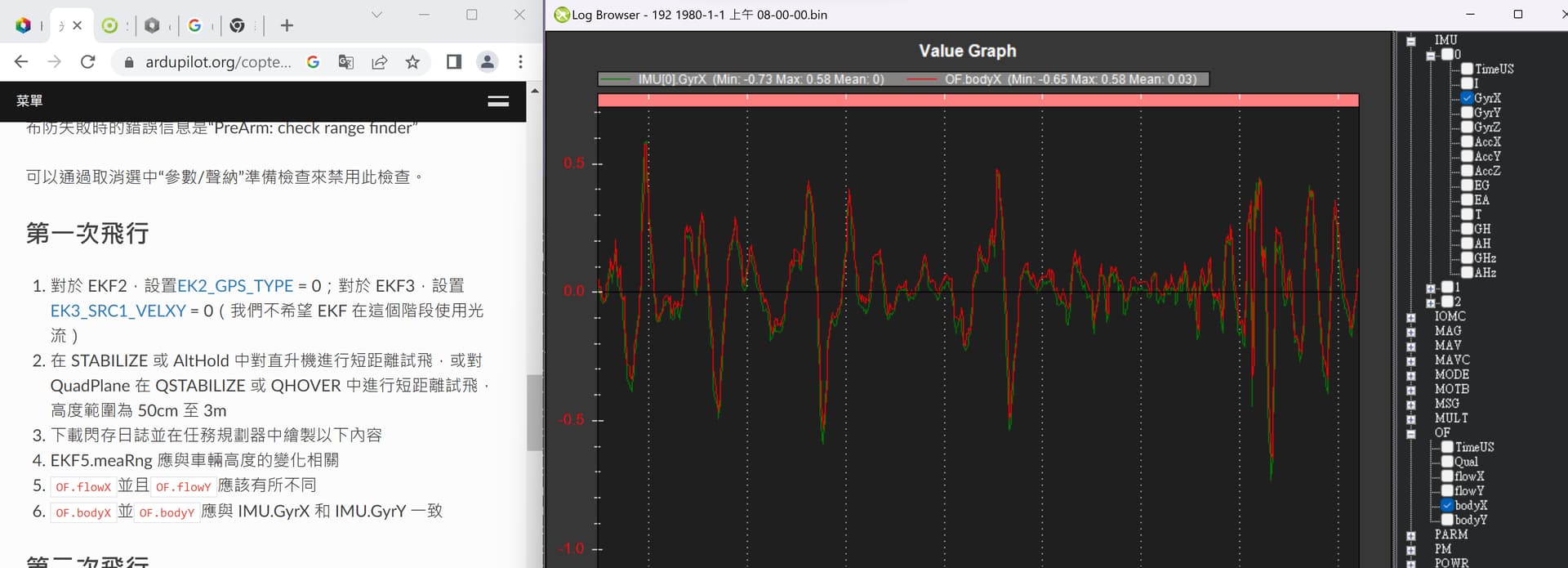
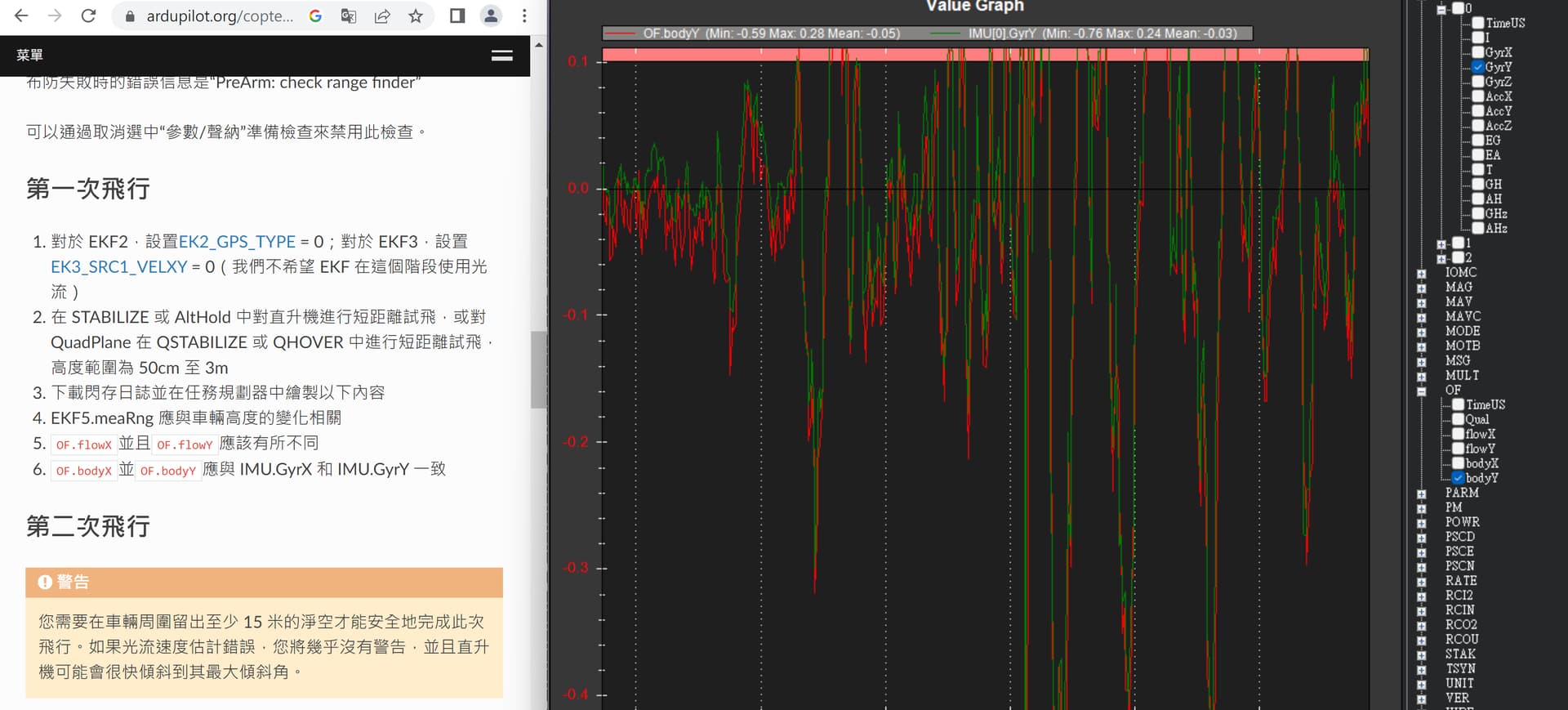
I think both Calibrating the sensor and First Flight are consistent with URL teaching,
But when Second Flight is going to take off in loiter mode, the mission planner will display a “need position estimates” warning message and cannot be ARMED.
I tried to adjust the rngfnd1_min value of the here flow based on the information I found, and I tried to change it to a value of -150~20, but it didn’t work.
If anyone knows the problem, please give me some advice, thank you!!