Hi, there
what are the right settings and setup in mission planner for the Here 2 antenna?
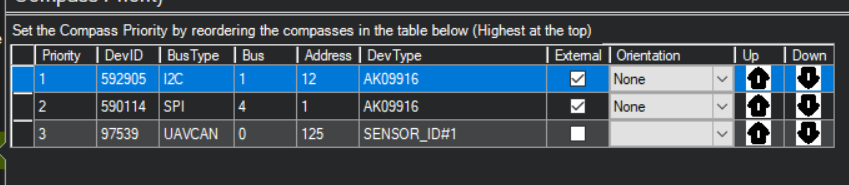
I have connected with the I2C cable and not as UAV CAN.
I´ve maded this settings, are they OK so?
Thanks in advance for your answers.
Hi,
as far as I know, the Here 2 supports two types of operation.
UAVCAN over CANbus or the traditional GPS over UART and compass over I2C.
The Here 2 and Ardupilot do not support GPS over I2C, unless something changed recently.