I had two frames. The first had bad vibrations. Probably something was bent from a previous crash. Couldn’t find it. Second was good and hovering. Then something glitched and it crashed twisting everything up. So frustrated the I tossed everything in the trash. The only place to get parts is out of china and waiting another 1-2 mount for parts… argue!!!
Not sure I will get another frame and try again. I have this page bookmarked if I do.
Hello Dwane,
Sorry to read about your crash!
I have also crashed several times and feeling like you frustrated and wanting to put everything in the trash
To give you some motivation, from the crashes the Trex450 frame was all broken, I glued together all parts and this thing is still flying perfectly with no issues. Yesterday it stopped in air and dropped with no damage. The motor shaft just broke. It was 15 years old… but is going to roll again
If you come back again before the maiden give feedback to double check together.
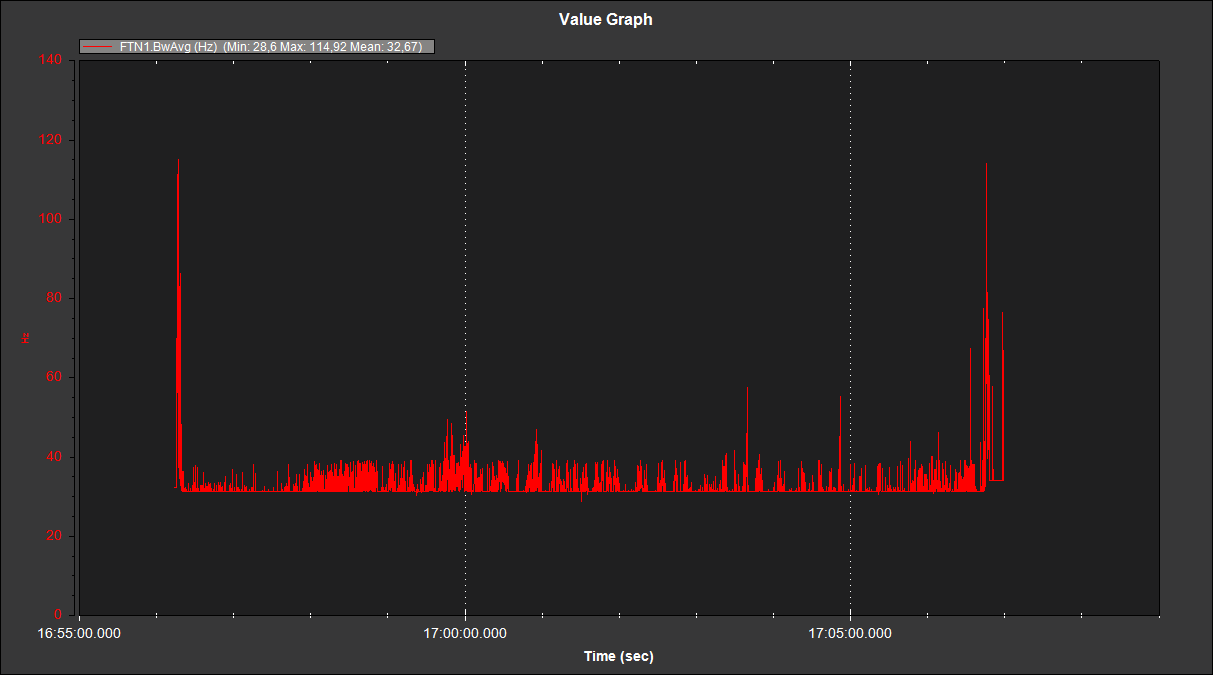
I took this value from the FFT logs as recommended in the documentation. The att_ref = 15dB do you see an issue? All my helis they show aroud 32.5 Hz and are 450 sizes.
@Pedro_Claro it depends on how well your rotor governor holds rotor speed. I use the built in ESC Governor. I generally don’t even check the FFT. I just set the programmed rotor speed as my notch center frequency and then make the bandwidth 10 hz and the depth 40 db. That cleans up my control signals nicely. The wider you go with the bandwidth, the more it will affect the control signals that aren’t impacted by the rotor noise. So my belief is the smaller the bandwidth the better
If I was to get back into heli, I would be starting from scratch. So frustrated I tossed everything but the electronics. So, I have the FC, servos, and esc. Servos are the 9g type.
Any suggestion on what kit to go with? I was looking at 250, 360, and 450 kits. Something that will work with the servos.
I am not able to upload my crash log file. System is complaining about it being to large (4.4MB max). It isn’t that large (1.17MB), so I presume the message board is counting all the files that have been uploaded.
@Pedro_Claro, if I am going to try again, then I really need to give it a good try. Here is the shopping list that I have come up with. Give me your thoughts.
I would like to stay with a S3-S4 system if possible. My battery charger only handles up to S4.
I was thinking I would go wit the DS919MG servos for everything. Your thoughts? I am not planning on doing any crazy flying. Just sport flying (nothing inverted, etc.)
I think I will have better luck with an RPM sensor. Do you have links to the hall sensor and magnets to use?
As part of the setup, would using two GPS/compass modules help? I was thinking it would and I could mount one on the frame and the second on the tail boom.
Hi Dawne,
Maybe you should start from a simple setup with a single compass. You have not yet succeed with sttabilize mode :-D, I woud leave the auto modes for a second step. Any time you can add another GPS even with the compass on it. I have many aircrafts all with autopilot and never have issues with compass. I experience already an issue but it was HW/quality fault. You could save and instead apply for a small Oled display and a xenon strobe flash, they are cheap and very cool. If you are good in soldering (workmans craft skills), you should get the 3144 hall sensor and the 3x2mm round n35 mangets. You place in the rotor as many magnet pols as possible, this will increase the precision and this precision is set on a parameter in the sw. You ask before the resistor value to drive the led, that depends on the led. I got mines from old scrap pcbs, the leds always comes in serial with an attach resistor, desolder them both. The resistors should be around 600ohm or so. When you desolder you have to check the polarity, you can use the multimeter in the diode mode, and measure in both led terminals, this will iluminate the led, note down the polarity of your probes. Use the same direction (+ → -) when soldering the led + resistor direclty to the 3144 pins as pull up. The current will flow from VCC (pin1) trough the resistor+led to the Output (pin3).
Have fun!
The list above is perfect!
Did the motor get destroyed from last crash? Anyway check the pinion gear if its a 3.5 or 3.175mm shaft, they need to match. I also boght that one the 3700KV because of the cost, but my preference goes to this as it comes with more torque in expense of rotation. The Heli becomes more smoth with less shrill sound. But I dont think you can use a 3S battery due to voltage range. Why dont you use a 4S battery? Typically with a 4S the helly will run for 10 minutes and the weight is not yet in balance, need to add some few grams int he nose. From my point of view with a 3S you loose efficiency in thermal and weight. Just with DS919MG servos will work just fine! Hall Sensor 3144 If soldering 3144 an issue 3x2mm Magnets
I didn’t realize that was a LED and resitor on the hall sensor. Good to know. Thanks for the links for the hall sensor setup.
Nope, but was so frustrated I threw it away. LOL
I have not tried with 4S battery. Have just used 3S batteries. I will put that on the list of things to get.
I just read that torque tube gears strip easily and are not very good for beginners or crashes. I am not seeing any 450 FBL belt drive versions out there.
I am thinking about going with a ALZRC X360 FAST FBL. It is a little bit bigger than a true 450. Looks to be have a wider frame than a 450 PRO, which will help with mounting the FC, battery, etc.
Here is an interesting frame. Mystery 450 Not sure where you would find part for that one.
a good German descendant shouldn’t throw out things that still work
Dont forget to get the pinion gear!
I bought a Tarot450 kit with torque tube gear but came with a design flaw. The tail gears had too much gap and I end up doing an easy mod and its working fine now. I would not be worried with the torque tube gears.
In case of crash should not be a difference for you anyway because I am certain, you will toss it all out !
Well I have this one, its a good cost efficient machine, but the price shown will double the momemt you add the servos and motor. BTW, in case you crash it, just send everything to my address in germany I bear the shipping costs
For the X360, I am planning on using the DS919MG servos. Not planning on doing any wild 3D flying. Just sport for now. I think that all I need is the X360 and a motor for it. I am planning on getting a 3S motor, ~3700KV, to start with. I am looking for one with the 3.5mm shaft right now.
If I do crash it and give up again… it’s all yours!
You are mounting a Fiat engine in a Ferrari!
Mine has the original parts and they are the ones that make all the difference, for a very precise and smooth flight. But your bet is good, later on you can make the transition to better parts if needed.
cheers
In this log you set the SERVO_BLH_POLES=14 but your motor is a 6 poles engine. You have ot set this correctly otherwise your eRPMs will be wrong (in your case they were far low).
Also set the LOG_BITMASK=14335 to have fast attitude logging.
Your Roll/Pitch P settings are too high and worse is your vibration in all axis extremely high especially the y axis ~40m/s/s, your Heli should be below 7 m/s/s.
From your attitude control logs I think your swash plate was not well calibrated, did you check the blade tracking?
How can you tell? I order this motor. I don’t see where the poles are listed?!?!?!
Yes. However, it was off just about every time I started the heli. So, I would adjust it, check it, then fly when it looked good. Makes me think there was some slippage in the push rods or something. Makes me think that starting over with a heli that hasn’t been crashed was a good idea.
I mean the motor you use before, from the logs I can see its a 6 pole. Normally they are 6 or 8 pole.
If you dont have the datasheet later we can check by looking the FFT logs and reverse calculate to figure out what was suppose to be the engine erpms. Then you adjust the parameter until the erpms match the theorectical expected number. This is how we discover the number of poles when we dont have the datasheet.
I would keep this rule : when something is not ok, never take off ! Also I learn that when I am loosing the Heli control, and I try to control it, the damage of the crash its huge, compared to switching off imediatly the interlock. The Heli with autorotation normally doesnt suffer so much the impact and lands more or less strait.
Sounds good. I think the new motor will have 12 poles. I should be able to count the poles because I can see in the motor by the pictures. I would have had to take the old one apart to tell. Oh well.
Good rule. I try and follow that. I also need to learn when something doesn’t look right. I am learning that also.
Order the parts yesterday. Now just need to wait for them to get here from china.