I will change the spin up time. I think I was dealing with an old ESC that was having issues and that is why I did it.
I think I got the throttle curve off of one of the videos that was linked in the documentation. What do you suggest?
I will take into advisement and keep the collective low as I am spinning up. I have started my quad copters with the viatical axis in the middle. I though it would be the same way, or not affect it very much. I have the quad arming with a switch also.
Thanks for the help! And please keep the questions and suggestions coming. Super helpful!!!
I reset the parameters to the defaults. H_RSC_RAMP_TIME default is 1. That is were I got the parameter. I am going to set it to 5 (half of default H_RSC_RAMPUP_TIME)
The default throttle cure is 25, 32, 38, 50, 100. What should it be?
I don’t know. You have to determine that through flight test. It depends on your collective set up, the weight of your heli and rotor speed you want to maintain.
I was checking your log and how do you know the rpms of your rotor?
I could not find any rpm sensor, you will need that! You have a dshot ESC capable, does it send back the eRPMs? If not I recommend you to get or build one, ex: here with 3144 hall sensor.
From the described issue you had above maybe you configured wrong the dshot ESC and it just fire when you pull the throttle up. I recommend you swapping one of the wires of your engine, to revert the engine rotation so you can verify/pratice at home to simulate the arming, motor interlock and even thortling up. Reversing the motor wont make the rotor spining, but watch out the first time, ensure is really rotating opposite way.
@Pedro_Claro I thought SERVO_DSHOT_ESC was the type of ESC. I have a Race Day Quads BLHeli_32 (here). I have not attached the telemetry wire yet, but am planning to. I am also planning on using the bdshot heli firmware so there will be extra information with the DShot bi-directional communications. I just finished the same setup on a quad copter and love all the extra information the BLHeli_32 ESCs provides.
The ESC does send back RPM information of the motor, which I could then calculate the head speed. However, I was under the impression that if I used a throttle curve that I didn’t need to have a sensor for the head speed. I do think it would be better to add a sensor and use the governor mode for the head speed. I am planning on doing that in the future if everything goes well.
That is a very good suggestion of reversing the motor and practicing arming, etc. I will definitely give that a try. I was wondering what the sequence for arming and start up would be by adding the motor interlock. I presume the sequence is to arm the motor and then turn on the interlock with the throttle stick all the way down. Let it spin up according to the ramp time. Then it should be fully functional.
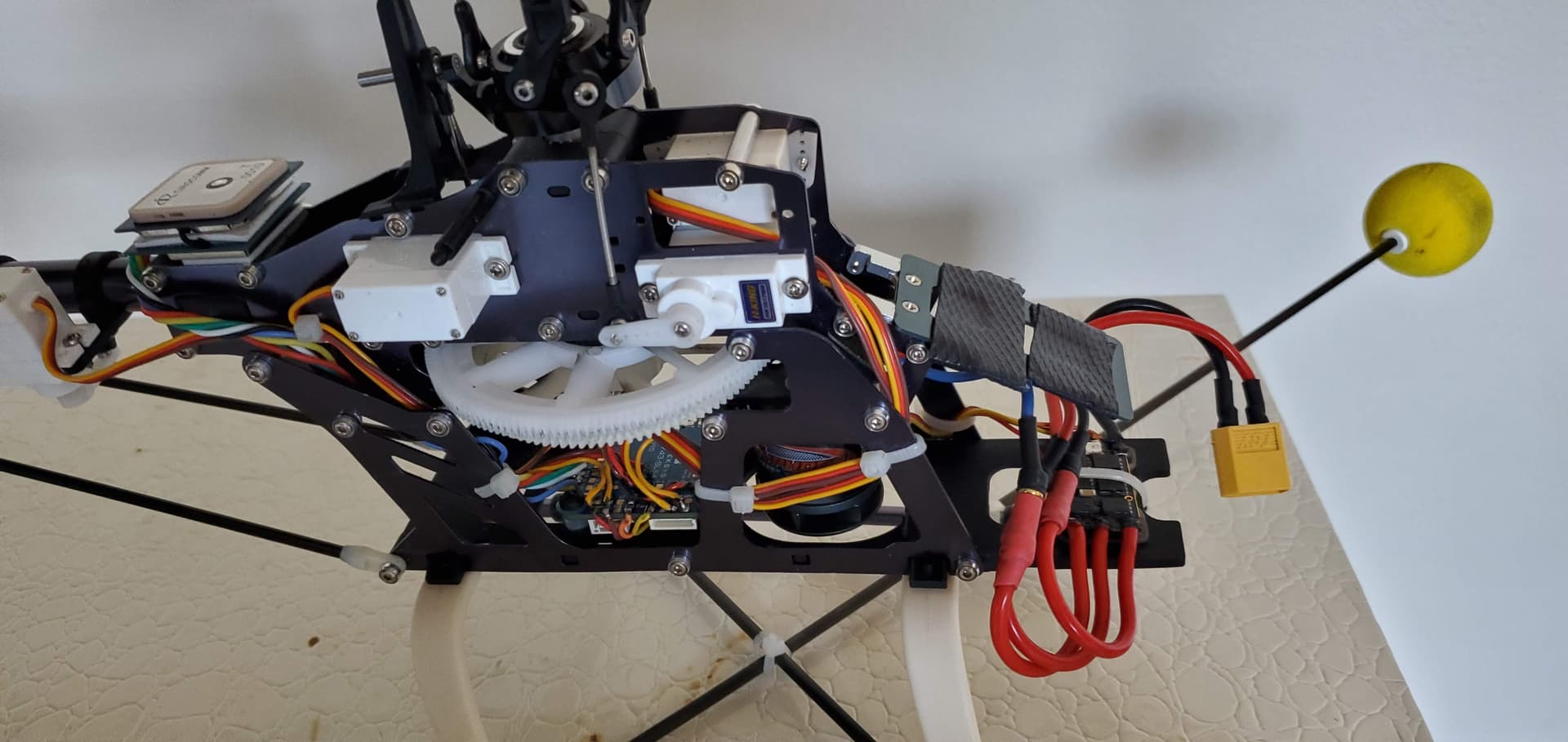
I am currently stalled in the build as I am waiting for servos. It took me a while to find some that I really liked for the right price with the right parameters. And with all the supply chains issues we are having they are taking a while to get here. I am going with the Corona DS919MG (here) and DS929MG (here).
Since I am soldering everything, I decided to go with metal gears on the servos. The hope is they will ‘stall’ before breaking. The plastics gears broke on the other ones. Not a big deal when the servos has a plug and can be quickly changed, but when they are solder in it takes a lot longer to change them. I know I could add some connectors, but I am trying without connectors first.
As a last note for anyone that is reading this and might be interested… I am using the Mateksys H743 slim flight controller. I have it mounted on the bottom tray by drilling four holes and using standoffs. It fits, just be aware of the front to back location so you can access all the ports. I have built a quad copter with the same FC and the BLHeli_32 ESC with telemetry and bi-direcitonal DShot, it is so much better than anything I have had in the past. Love that FC with the ESCs! One of the best features the BLHeli_32 ESC has is a variable PWM frequency. I read about it here.
Just be carefull because I never had to set this one. I beleave that it will turn all outputs into dshot and you dont want that.
That is correct!
Sorry to disapoint you but the BDshot and the PWM frequency brings nothing to Traditional Heli world . That PWM frequency is directly driving the engine that is coupled with propellers, which affects the speed/reaction/stabilization, tunning this makes only sense for drones. For the Helicopter you have a set of gears and the rotor mechanics and will not make any difference. By the way you should set the throttle curve very flat for the beginning (~2350/2400 rpms), so your engine will run always at the same rpm. Here the governor will make a difference. A stable Heli is all about a good calibrated mechanics, you have to look for the vibrations, like diferent blade grips, tracking, etc. recommend to look for the FFT results and properly set the harmonic notch.
That is a bummer. However, I think it does bring one small thing to traditional helis. The ability to spin the motor slower. Spinning motors slower might have be around for a while in newer ESCs. I have not updated my ESC for about 10 yrs, so I can’t be sure. What I do know is that when I would try and spin up my old ESC slowly, it would clunk out and not spin.
That is good to know. I was planning on doing a curve of 60,62,65,70,80 to start with. It is a bit flatter that what was suggested in the videos in the documentation. I should be able to look at the log files and see how well that works by calculating the head speed using the RPMs the motor is reporting.
I agree and look at how every thing is spinning when I start up, even at slow speeds.
I will start looking at the FFT. Good to know that is where to look. I am still learning how to interrupt the log files. I find something new to look at everything. :D. So much logging.
That was the root cause of my first crashes with 450 ! At which rotation the heli is at 60% ? If 60% represents something below 2100 rpms, your heli will become unstable when you are breaking its speed / lowering the altitude.When you brake you go really low/negative on collective pitch (meaning low rpms also). When you are hoovering or driving forward you dont notice because the rpms are high ~70% but when you need to break or lower the altitude, you can easily loose control, the tail has no authority at that moment due to lack of rotation. My recomendation, make it totally flat and match a rpm like 2400 should be enough. Later experiment pushing the throtle total up (max blade pitch) and see in the logs how much rpms drop and compensate a little bit with the curve. My 450s with no curve just flat, when pushing harder only drops ~100rpms, with governor almost nothing. I think this depends on the engine torque, I am using 1850KV on mines.
Set the RPM2_type = 5 (to use the ESC telemetry)
Set the RPM2_scaling= Divide your motor gear T14/ rotor gear (T150) = 0,093
This will give you the rotor rpms in RPM2.
You can also set the RPM2 to follow the Harmonic Notch (not as beautiful).
Looks like my plans need to be modified a bit… Set the RPM2_x as you describe. Spin the heli up on the ground, then shut it down. Check the log file for the RPMs and see what the head speed is. Repeat until I get the 2350/2400 RPM Head speed as desired.
I have been reading up on the governor mode. I am not understanding where it gets the RPMs from? Does it get it from both RPM1_x & RPM2_x? If both, does it average?
Also looking at the link you gave for your hall sensor setup… What resistor did you use?
What motor are you using on your 450? I am using a Turnigy Typhoon 450H 2215H Heli Motor 3550kv.
I am not able to get RPM2 to show anything in the status windows or in the log files. I do see ESC1_RPM showing information. Can you take a look at my configuration and see what I am missing?
After checking your parameters, I recommend the following changes:
H_COL_MIN =1450~1485 (maybe for a start you should not set the min collective too negative)
H_RAMP_TIME= 5
H_RUNUP_TIME=6
INS_HNTCH_ENABLE=1 please enable the harmonic notch filter.
After enabling some more parameters will show up after reboot:
INS_HNTCH_REF=1 set to 0.096 to make the calculation between erpms and rotor rpms.
INS_HNTCH_MODE=3 to follow the ESC telemetry.
INS_HNTCH_HMNCS=11 to llok for the 1st , 2nd and 4th Harmonics.
INS_HNTCH_ATT=40 dB
INS_HNTCH_BW=32 hz
RPM_TYPE=4 set it to folow the harmonic notch! If you set to follow the ESC it will not work.
RPM_SCALING=1 here you set it to 1 because you are following the harmonic notch which already has the scale corrected.
You dont need to wait for the autotunning form 4.2, you can start from using the changed settings I did in your file here , do a small flight and give me back the log I can help you to adjust the rest of the settings. My gut feeling says they should be just fine for your setup. Later you can play with the auto tunning.
The most important thing before tunning the PIDs of P/R is to check in logs the PIDY for the I term. Your tail servo (servo6) has the trim set to 1500 (btw did you adjust the min and max for servo 6?), assuming this is the mode where your tail blades are with zero pitch (no thrust), you have to mechanically “push” the tail servo to give more pitch/ more torque (can be done by shortining the rod or decresing the trim to ~1440. Otherwise autopilot will increase the I term to get there. My experience with 3 different 450s is that when the I term is not around 0, the tail will never get stiff when manuvering, specially with low rpms. Also you will always be changing other tunning parameters trying the adjust things, where the root cause of many issues is the I term from the tail as said above. BTW from your pictures is not easy to see the tail servo setup with the linkage rod. My recommendation screw the rod in the middle of the tail servo horn, otherwise you can have too much mechanical gain. I set you tail VFF=0 , later when you share your flight log we can see how is behaving.
This : JDHMBD Helicopter H2222-1850KV(6S), but recommend to use with 4S maybe with 3S wont work. These engines have less rpms but more torque and less noise.
BTW Please double check your engine pinion gear if its a 12T,13T or 14T and make the correct calculation for the HNTCH. I assume you must have a 12T and set INS_HNTCH_REF=0,096 in your parameters.
@Pedro_Claro why is the bandwidth so high. That’s almost as big as the actual rotor speed. I normally set it to 10 hz. You really don’t want to set it very wide.

 I am going to set it to 5 (half of default H_RSC_RAMPUP_TIME)
I am going to set it to 5 (half of default H_RSC_RAMPUP_TIME)