Is this set up at the minimum take off weight? No payloads or gimbals…
Got a couple of pictures?
Hello,
yes that is minimum take off weight, without any extra payloads.
Also I have a question. Why in FFT analyse I can see huge difference after harmonic notch filter (from 25 on x axi to 0.25) but ther is no change in Vibe parameter. As I know well this kind of filter should change this parameter.
Second question: On IMU’s graphs i can see fluctuation between -8 to -12 what is super score for this kind of drone. Than why i have soo high Vibe parameter if this parameter is calculate from raw IMU log?
Maybe in 4.2.1 arducopter is some kind of bug what don’t implement any kind of filter to VIBE parameter ?
In logs, VIBE is the unfiltered actual hardware vibration.
The Filtering we are discussing is in software and after all the sensor inputs.
So vibrations are a hardware issue that affects the software and only so much can be done with the software filters.
You first need to minimize the REAL vibrations.
OK i see. than I have another question.
If IMU’s value for x,y,z are in wiki range ( from -5 to -15) before adding any filters than why Vibe parameter is not ok and not in range?
And if filters work only for logs than why should i use it ?
Why should i use filters if they change nothing in drone behaviou
The filters do change the drone bahaviour a lot. But you do need to fix hardware issues first.
2 Likes
Hello again.
Do you know how is calculated accel_vibe_floor parametrer ? Is any option to look at it?
I want to check motor oscilation. I think, my vibration issue can be provide by little vertical movements whitch i can’t see. But it propablly should be linked with bad PID tuning.
You need to supply a better log, after you’ve fixed the physical vibration issue. Just do a takeoff and some hovering if possible. Maybe gentle movements if oscillations are not bad.
Please supply a picture of the flight controller mounting and wiring.
Please describe your entire aircraft and components.
You’ve only a got a pixhawk1 - It wont handle vibrations as well as a new flight controller with improved IMUs and even internal damping.
You will never get PIDs, oscillations and position under control while there are vibrations.
Examining and changing advanced parameters wont fix a craft that cant basically fly.
Hello All,
after few changes (different arm, different frame configuration and etc.) witch didn’t change to much as you can see in previous logs. I add dampers for pixhawk mount, now is much better but i don’t understand why in logs IMU AccZ parameter for first and second IMU has worst value than third IMU witch is not dampered. Than I suppose that mu copter vibration ratio is around natural Pixhawk vibration ratio (60Hz /80Hz?).
Also I would to know witch IMU is using by FC in flight, is any option to check it ?
There you can find my log:
https://drive.google.com/drive/folders/1fypzmm3c8krDOIFE-BetNx08deoaalZz?usp=sharing
No access to that log
https://drive.google.com/drive/folders/1fypzmm3c8krDOIFE-BetNx08deoaalZz?usp=sharing
sorry there is new link
Vibes all look acceptable, good work.
Current doesn’t quite make sense, as low as 2 or 3 amps during flight and sometimes up to 80 to 100 Amps for small changes in motor outputs ¯_(ツ)_/¯
Double-check that your voltage readings are accurate too since you need to be doing something with current readings.
See Leonards post on voltage, current and ESC wiring - I’m not saying this might be an issue you are experiencing, but it is a good read for us all.
Set these:
BATT_LOW_VOLT,43.20
BATT_FS_LOW_ACT,2
MOT_SPIN_MAX,0.95 (no need to go higher)
And I think HNOTCH settings could be changed as follows:
INS_HNTCH_REF,0.25
INS_HNTCH_FREQ,40
INS_HNTCH_BW,20
There’s a lone peak around 29 or 30Hz, I’d be hesitant to filter that right now.
See if you can get Autotune done to fix up the attitude control and if everything is going OK you could maybe put in a static filter for it, or more flight data might help improve the HNOTCH settings.
INS_HNTCH_OPTS might be useful later if you need it.
Current and Voltage is fine, there is generator on the copterand current sensor is on second circuit (battery are for safe ufor only) ![]()
Normaly current is around 80/100Amps but is mesured via generetor
I think the same, vibrations looks quite good now, but after some hours spended on arducopter code i still don’t understand how any kind of notch filter can affect on VIBE parameter or IMU. There is no way or gate in code to affect on calculations for this parameters. Maybe it is my lack of knowladge or it is sme kind of bug. In version 4.2.2 developers makes some changes but for me it still looking like some extra feature what can’t work properlly. If any one of you can explain me how does it works, will be great. Maybe some kind of diagram or wiki page can explain it better.
The filtering is buried in the PID loops, it won’t necessarily affect or show in the vibes or IMU accel logged values.
1 Like
Hello,
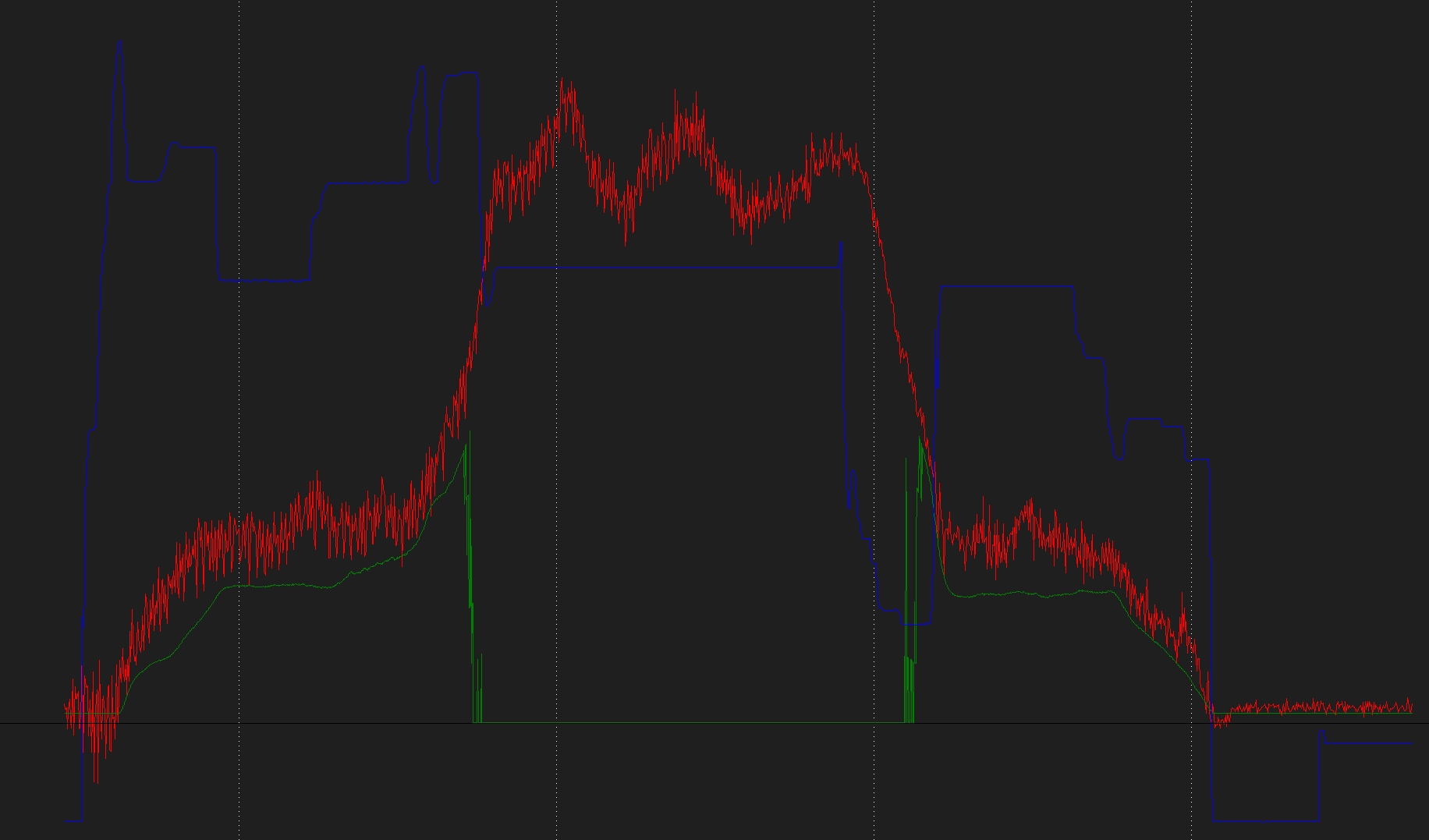
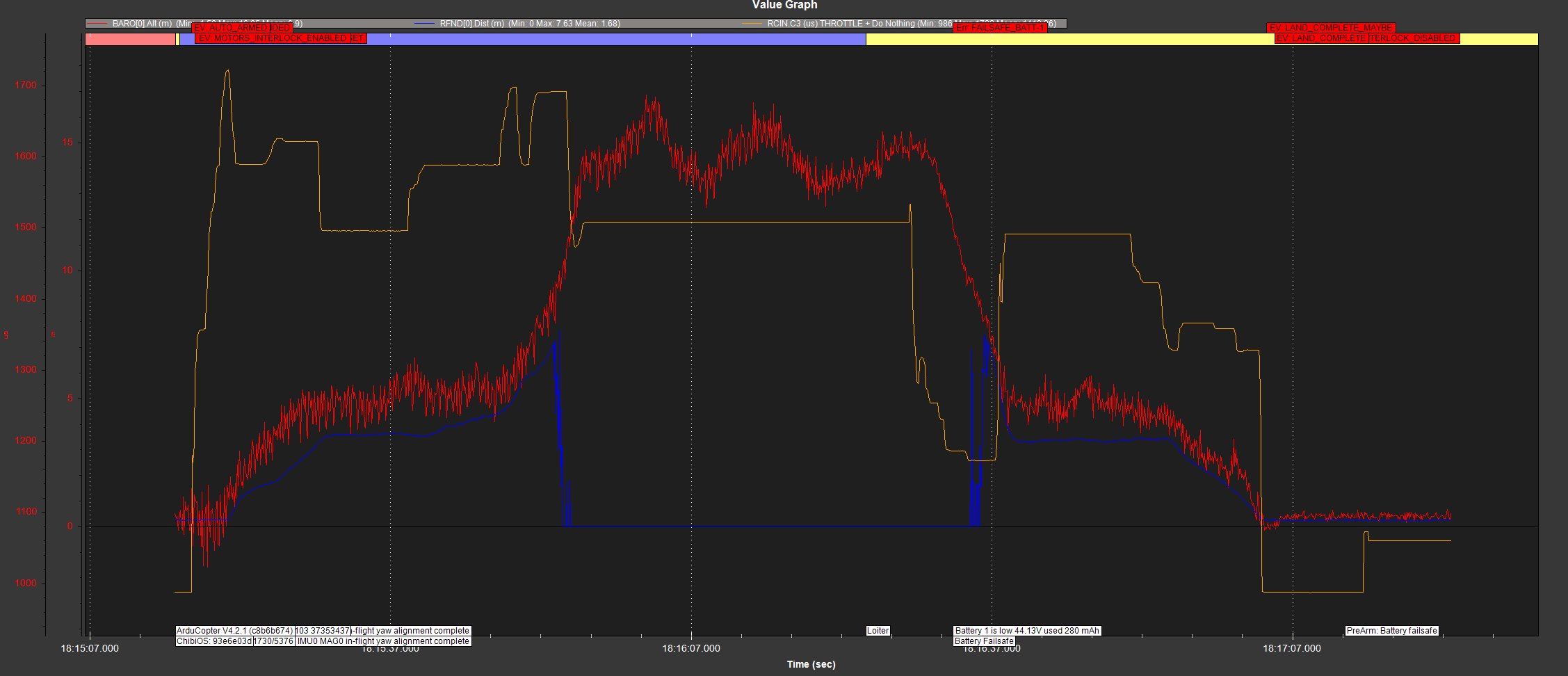
I would like to ask about range finder setup. In the picture you can see how copter behavoiur afrer clibm over 7m or wher go down below 7m.
Range finder is setup for 7m but when copter go up or down happend something weried ( it sudennly goes up or down aproximetly +/-2m.) Do you know which setup is respond of this situation ?
most range finder measurements are voltage sensitive. How stable is the range finder power supply?
It is powered via pixhawk, then i think is super stable ![]() For pixhawk i use tested becon ,
For pixhawk i use tested becon ,
No, a separated power supply is a lot more stable.
What makes you think there is no power issue???
Maybe it is still high vibration issue, maybe it is barometer measurement error or something in range finder settings. I am not sure. that is why am I asking.