It looks like a main power failure to me. The log ends abruptly.
IMU accel is raw acceleration and not that useful for troubleshooting. Vibe is a processed metric as described here: Vibe analysis
Yes, your Z vibrations are high. And Tuning isn’t good. You should update the firmware to latest and configure the Dynamic Notch Filter.
Yes you are right, after check up drone i found disconnected power cabel.
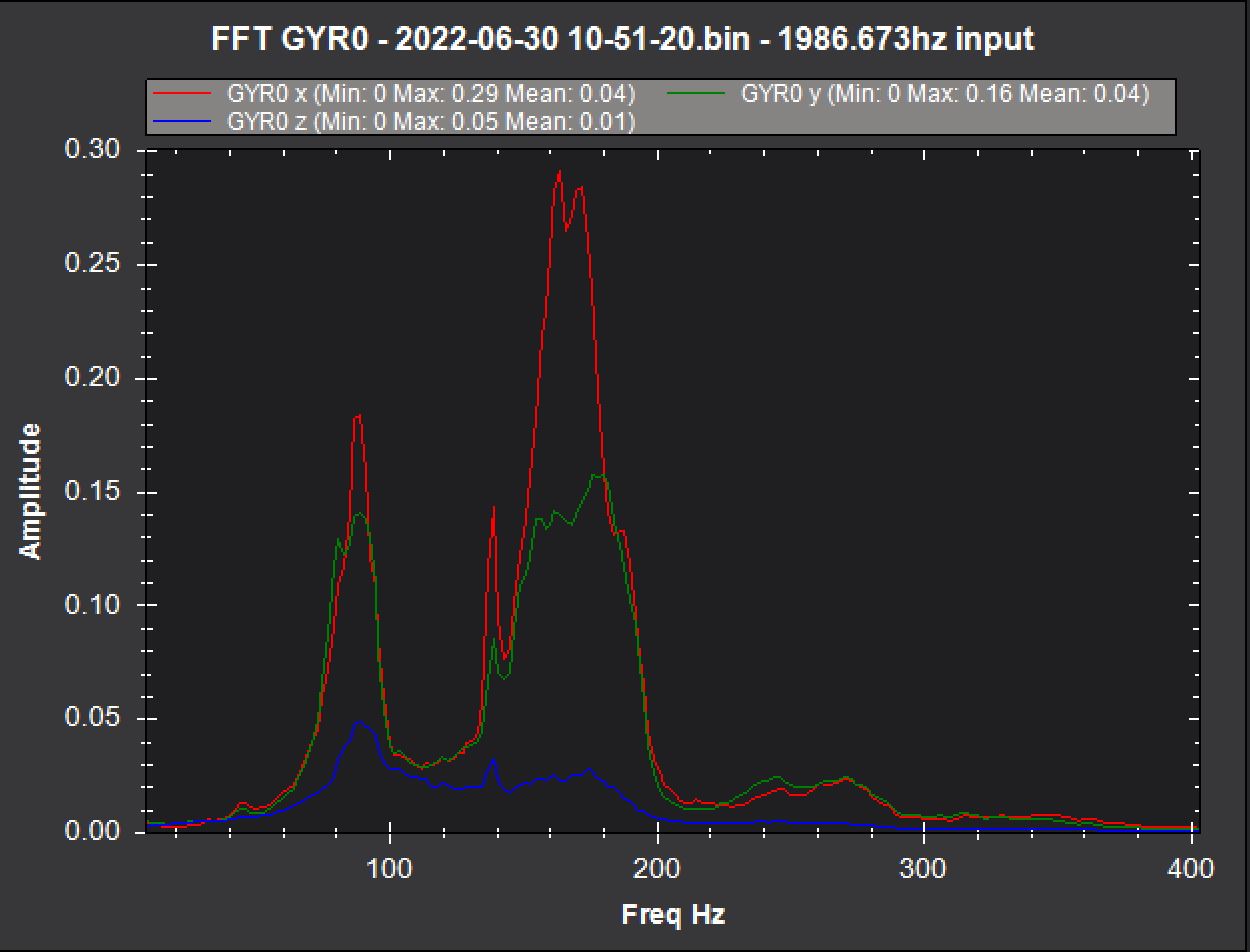
Now i am trying to figure filtering. I want to ask how to finde notch center frequency. Is it my motor speed frequency or the highiest spike o FFT chart ?
Generally yes but that’s not always the highest peak. There are often harmonics of the fundamental frequencies. Set INS_LOG_BAT_MASK to 1, make a short (1 minute or so) hover flight in AltHold and post a link to that log and someone can help and explain it.
I want to set harmonic filter around 160Hz and 2 or 3 harmonic for (240Hz and 320Hz) and second static filter for motor vibration around 85Hz. What do you think?
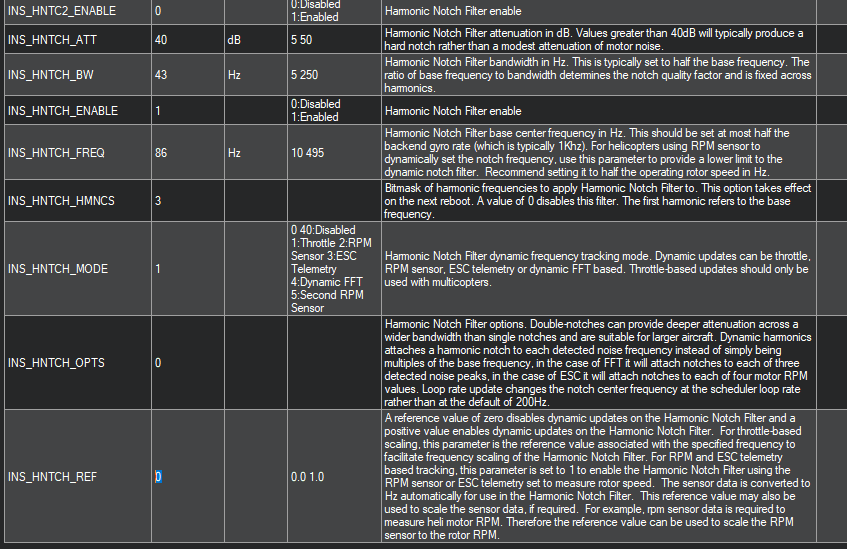
So, set the center frequency at 86Hz, bandwidth at 43Hz, harmonics at default. throttle mode and .258 for the reference. This will take care of all of it. Set INS_LOG_BAT_OPT to (2) and make another flight to see how it’s working.
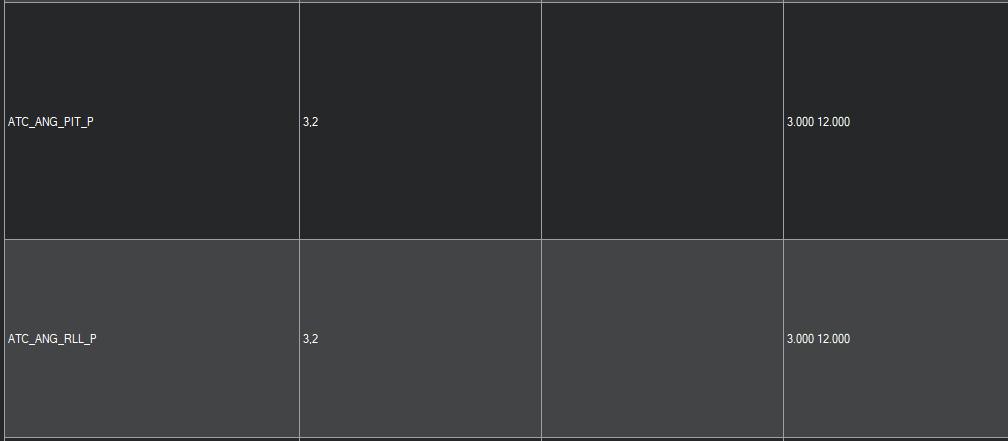
Is there some reason you reduced these?
ATC_ANG_PIT_P,3.2
ATC_ANG_RLL_P,3.2
Also, typically Rate P&I are equal. For some reason you have P greater than I.
Hello, as you suggested i set harmonic filter. It works great in fft analysys i see huge differences. But i have a question about vibe parameter. I can’t see any differences in my log. I don’t understand why. Could you look at log and help me with that ?
Hello,
today i have made few flights.
In first i used your settings ( vibe parameter is lover then usuall but still high) In FFT analysys i can see high pick at 5Hz is it normal? ( if i know well it should be drone maneuvers vibration. Also in FFT ACC i found high z vibration at 86 Hz)
In second flight i add static notch filter for 86Hz (I set 43Hz main frequency and 21 BW) but it don’t change much.
In third log i turn off static notch filter and change D value for pich and roll from 0.013 to 0.010.
In fourth log i change i turn off static notch filter and change D value for pich and roll from 0.01 to 0.008.
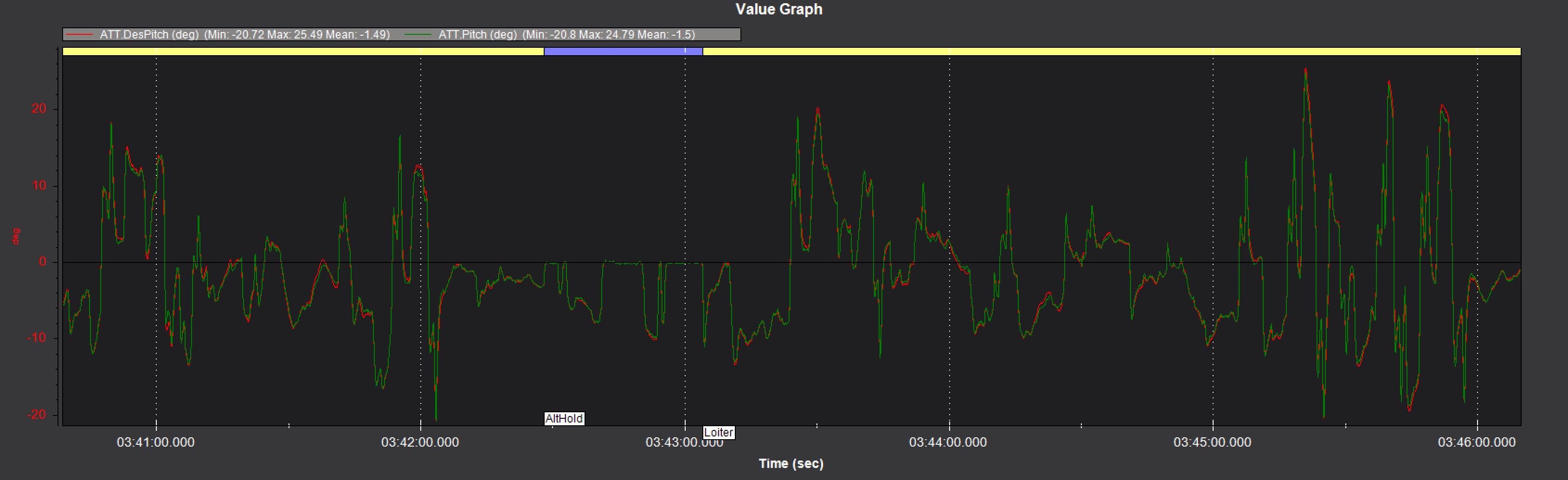
As you can see i still have bad pid tuning and vibration ratio. The weather today was good, no wind and quite warm. (after flights my motors were quite hot.)
Could you tell me how can i eliminate vibration in Z axi ?
Looking at the fourth log…
Z axis vibrations are still a problem, but X and Y axis is good.
So prop and motor balance is not an issue, the source of vibrations will be prop wash hitting the flight controller or wiring, something to transfer the vibrations to the FC or its mounting. The prop wash will always cause vibrations in the arms as the props over-fly the arms, so round or aerodynamic arms are best.
If you have arms with square-section tubes consider changing your design or doing a bit more work on the flight controller mounting system.
Leave the INS FILTER values like they are at least until you’ve improved Z axis vibrations, then you can lower them slightly if you have to.
I would try these HNOTCH settings (after you fix Z axis vibrations)
INS_HNTCH_BW,22
INS_HNTCH_FREQ,44
INS_HNTCH_REF,0.23
Even though there’s a peak around 80Hz, I suspect that the lower 40Hz peak is the source.
I set the INS_HNTCH_REF just lower than MOT_THST_HOVER so that the HNOTCH is working below the hover value and above it as throttle increases.
I use MOT_THST_HOVER x 0.8 as a rough guide, but there’s an actual technical equation in the HNOTCH docs.
Once all this is done, Autotune will fix up those PIDs but they look OK except for these:
ATC_ANG_PIT_P and ATC_ANG_RLL_P probably need to start at double what they are now.
Hello,
today i have made few flights. There you can find my logs : 11.07.2022 - Google Drive
I still don’t understand why i have good IMU’s value but Vibe i soo high.
Also i know there was problem with range finder (I forgot about cable and it was in range finder detection area)
Today i add some more weight but it didn’t change oscillation value.
Any reason you set up two harmonic notch filters? I know this is a new feature and it will suit some situations but I suspect you dont need it.
Set INS_LOG_BAT_OPT,0 so we can see what needs to be filtered out with the HNOTCH settings.
What have you done to reduce the Z axis vibrations, because they are still there?
Have you got a pic of your flight controller mounting and the aircraft in general?
Are the arms and their mounts strong enough? Are the base plates strong enough and not flexing like a trampoline?
Have you tried higher values for ATC_ANG_PIT_P and ATC_ANG_RLL_P ?
Drone is quite heavy around 25kg. I used 2.7 mm carbon plate for bottom and top plate. Pixhawk is mount in center of drone. We don’t use any dampers for pixhawk, there is hard mount. Drone is super rigid in my opinion.