Hello,
Hoping to get some help digesting some errors/logs. I have noticed some problems with a drone using the mRo Pixracer r15 flight controller, where the drone appears to “trip” or “stumble” mid-air during autonomous flight. The ground station reports an “EKF_LANE_SWITCH” error, and when going over the logs in the UAV Log Viewer software online, the places where we observed “stumbling” is where the drone thinks it’s suddenly gained altitude (from the ground, this didn’t appear to happen).
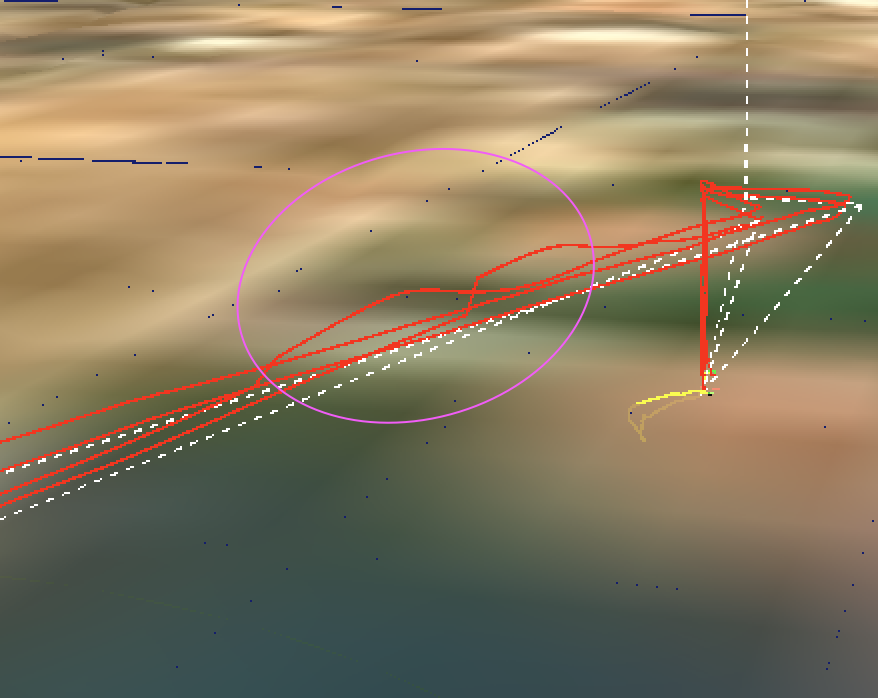
On one hand, I’ve heard that vibrations on the barometer can cause a drone to misread its altitude, which makes sense given the logs (pic attached, hopefully, area of interest circled in pink). On the other, there also seems to be magnetometer interference, and other forum posts suggest that the “ekf_yaw_reset” event is relevant to the mag.
Below is a drive link to the log bin file as well. Thanks for giving this a read!
https://drive.google.com/file/d/1QgLXbGczjGZAeX1UfKBP8VHo3t9F08YL/view?usp=sharing