I have read the docs regarding initial tuning setup, i have done the auto tune and it feels in roll axis but not great in pitch axis maybe because the Autotune agr was 1.0 will try with 0.8.
i am not able to understand harmonic notch filters though i have the log and checked fft but unable to find links to read and understand about it.
problems that i figured out- the drone is over powered so will have to put some dead weight because hover value is aroudn 12.5, autotune done in winds, z vibes are high will have to reduce them.
can any dev help me with harmonic notch filters and see the tuning also and advise what prams have messed up.
Do not try things in random order.
Use the order and the provided .param files as a starting point. There are things in the .param files that are not explained in the Blog post text, only on the .param files.
yes reading the order will restart the work on drone again, but what do you mean by .pram files as a starting point - does it mean the initial tune parameter ??
will just have to start from default tommorow. because last time i made a smiliar drone i dont think this prams file and blog post was there but i guess this will make things more eassier…
this step wasnt done because we were at the flying field and no freezer was aviable and also we would have to fly this drone in the same range of temp 30 to 45* C.
also since its a huge drone i had no guts to do the compass motor calibration because of the thrust this drone produces.
rest all steps were done.
Getting the hardware right - DONE
Proper initial configuration -DONE
First flight: Motor Thrust Hover and Harmonic Notch data collection- DONE( #)
Second flight: MagFit (DONE)
Third flight: Evaluate the aircraft tune - part 1(DONE)
Fourth flight: Evaluate the aircraft tune - part 2 (DONE)
Autotune flight(s)( FIRST DID QAUTOTUNE THEN AUTOTUNE)
Performance evaluation flight ( I HAVE THE LOG)
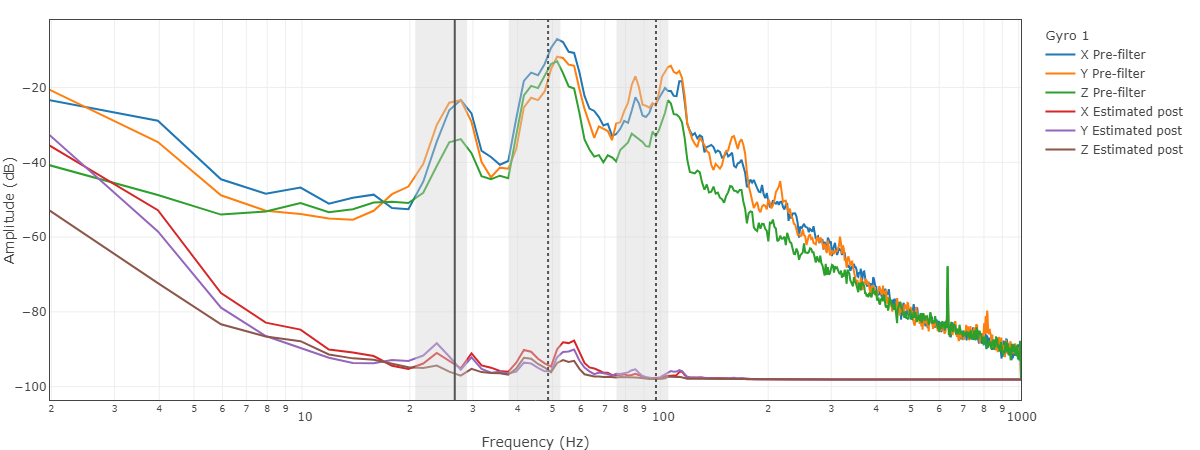
I have the notch filter best i could do as per my understanding. would you mind having a look at the settings i did?..also post notch filter prams all of a sudden my ekf compass variance have shot up. what could be the reason for this
also will attach a log which is post autotune where we moved in alt mode and thereafter in loiter mode but in loiter mode there was compass variance and and the drone behaved weiredly while stopping in loiter mode and i had to end my test flying day.
would really appricate if you could have a look at the notch filter setup and result of autotune.
the notch filter i had setup during the test flight surely i feel isnt upto the mark.
attaching a file here does this makes more sense for notch filter filter (7).param (357 Bytes)
just to add on i was trying my hand more and more on the webtool for notch filters watched couple of youtube videos… sharing the new prams advise if that would work…
Oh so does that mean 1 is fine ? Beucsse i read that 0 is a big no no and as per graphs in the tuning blogs filter of 20kgs for a prop of size (43inch) … anyways good to learn a new thing that gyro filter 1 is fine