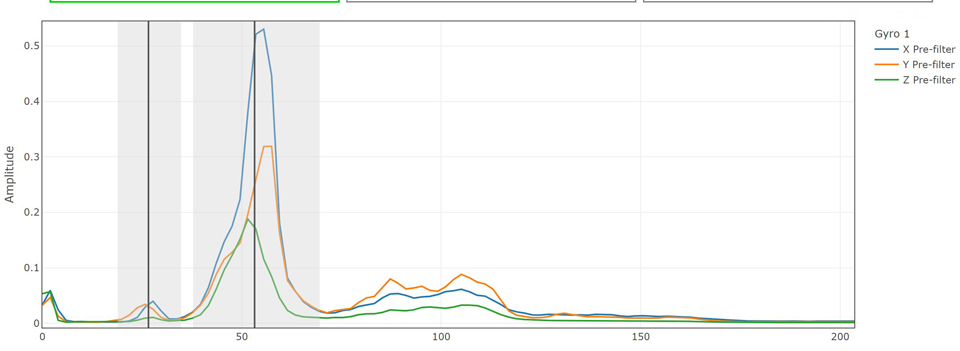
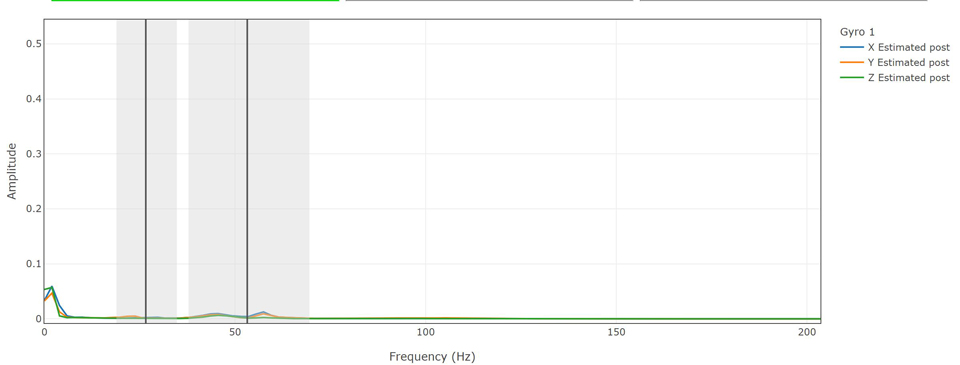
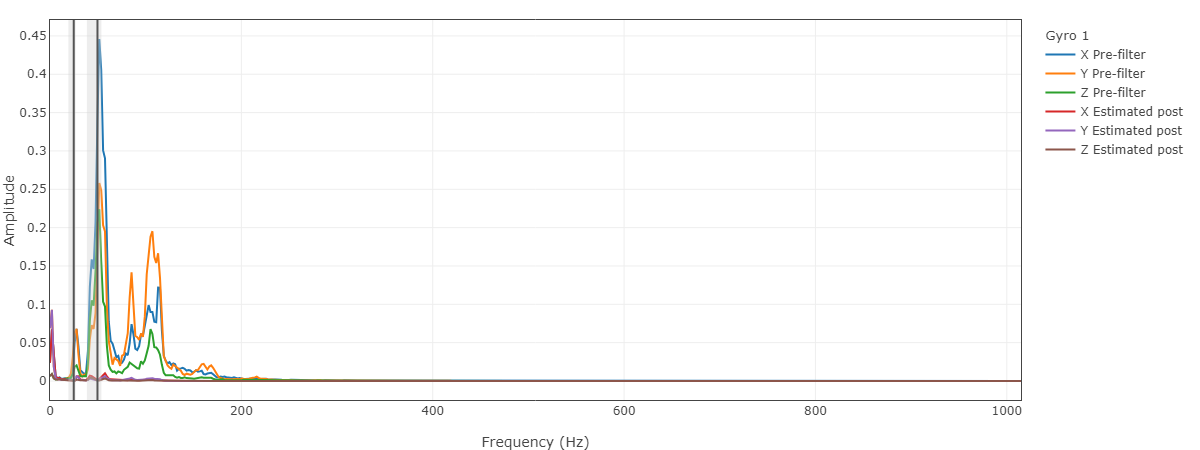
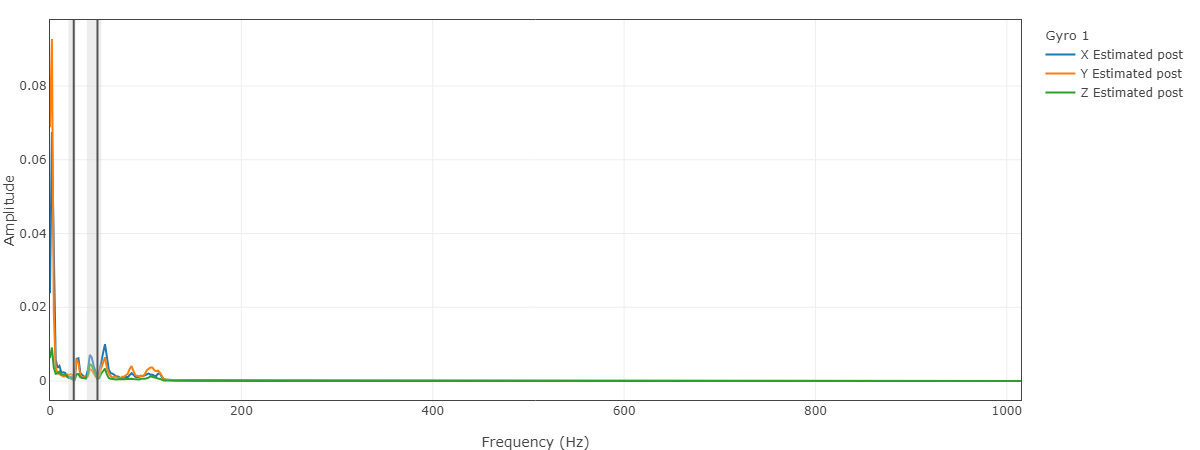
Set it back to default (20) or 15Hz minimum. Also, I don’t think you need the 2nd notch at all. Disable it, set the 1st notch to 1st and 2nd harmonic and the center frequency at 27Hz. Make those changes in the Filter review tool and plot “estimated post filter” and see for yourself.
Yes. The low gyro filter and too much Notch Filtering likely didn’t produce the best Auto Tune. I would not run an Auto Mission until you have this craft tuned.
so we did the harmonic notch but gyro filrter 15 didnt work well so did 10 and it was flying well.
we did a autotune post that. results are in the bin file below.
we are still working on getting the z vibes down i guess because of high z vibe we care also expernicing compass variance at times.
can you have a look at the notch filter setting and the autotune result
This looks pretty good. The Notch Filter is working perfectly and the PID’s are closer to what they typically are for a craft of this size. No doubt the 0.09 aggression is responsible for this. There is some pitch/roll jitter but it’s not terrible. Perhaps because the overall vibration levels are high.
The magfit is not compensating as much as it could.
I think you should repeat that flight. and again, post the edited intermediate .param files. All of them, not only the one for the notch filter.
Yes, looks like you are right. The ODI, DIA and Motor compensation coefficients/offsets were not calculated. What MAVExplorer produces from the last log is significantly different in the compass calibration offsets (OFS) than what shows in the parameter file. At least for Mag 1 didn’t look at 2.
so we had been working on reducing the z vibes all this while finally it has come down but not going down further we have almost tried all options possible. intially at 23hz there was notch set but after few changes in drone we have put the filter at 55hz since there was no spike at 23hz. attaching log file.
request you to have a look at the z vibes and notch filter. if it looks good then i will start off with magfit and other steps.