I’m trying to built a tiny ArduCopter with a Flywoo F745 AIO board on a 2" Whoop frame. But when arming and throttle, it turns over backwards.
Please advise where to check in such cases.
Use Mission Planners Motor Test function to check order and direction. Read the note and click the link to be sure you understand what order the test is run in when you select the A-D buttons.
Use Mission Planners Initial Parameter Setup, under Mandatory Hardware, to set the initial parameters.
Thank you for your comment.
I have confirmed the motor and propeller order and direction. I don’t think there is any problem.
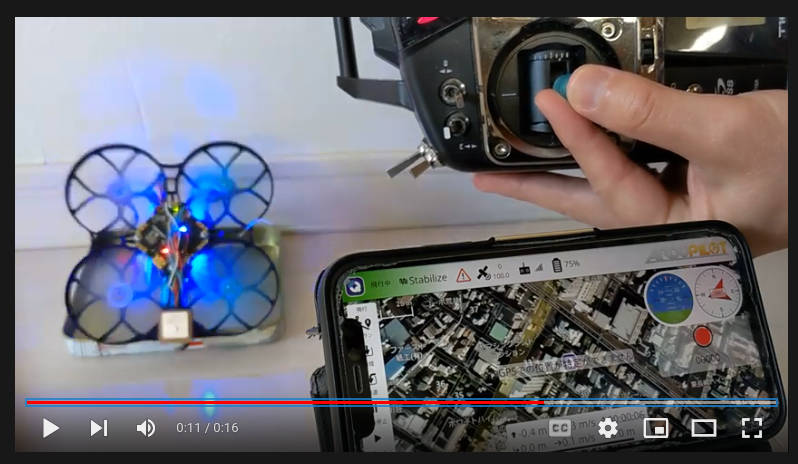
By the way, take a look at this video.
Normally in stabilize mode, when the vehicle is tilted, I think the motor rotates to bring it back to horizontal.
But my ArduPilot vehicle is unresponsive when I tilt it.
This looks like the attitude control is not enabled.
Is there a point to check?
I’m sorry to continue posting.
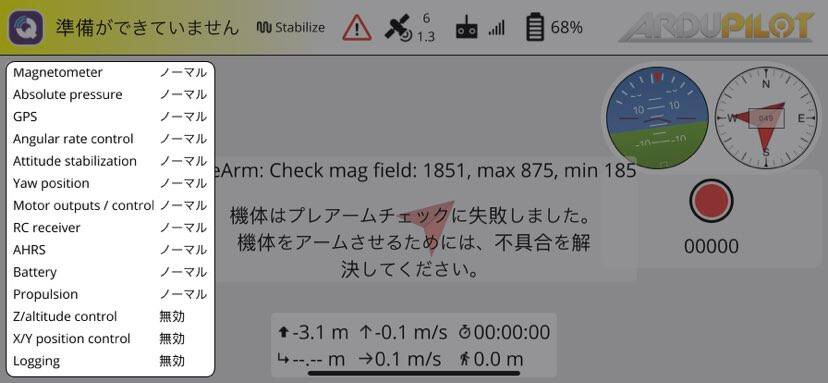
Looking at the state of the aircraft with QGC, X/Y position control is disabled. I suspect this is the cause. Is there a way to change this?
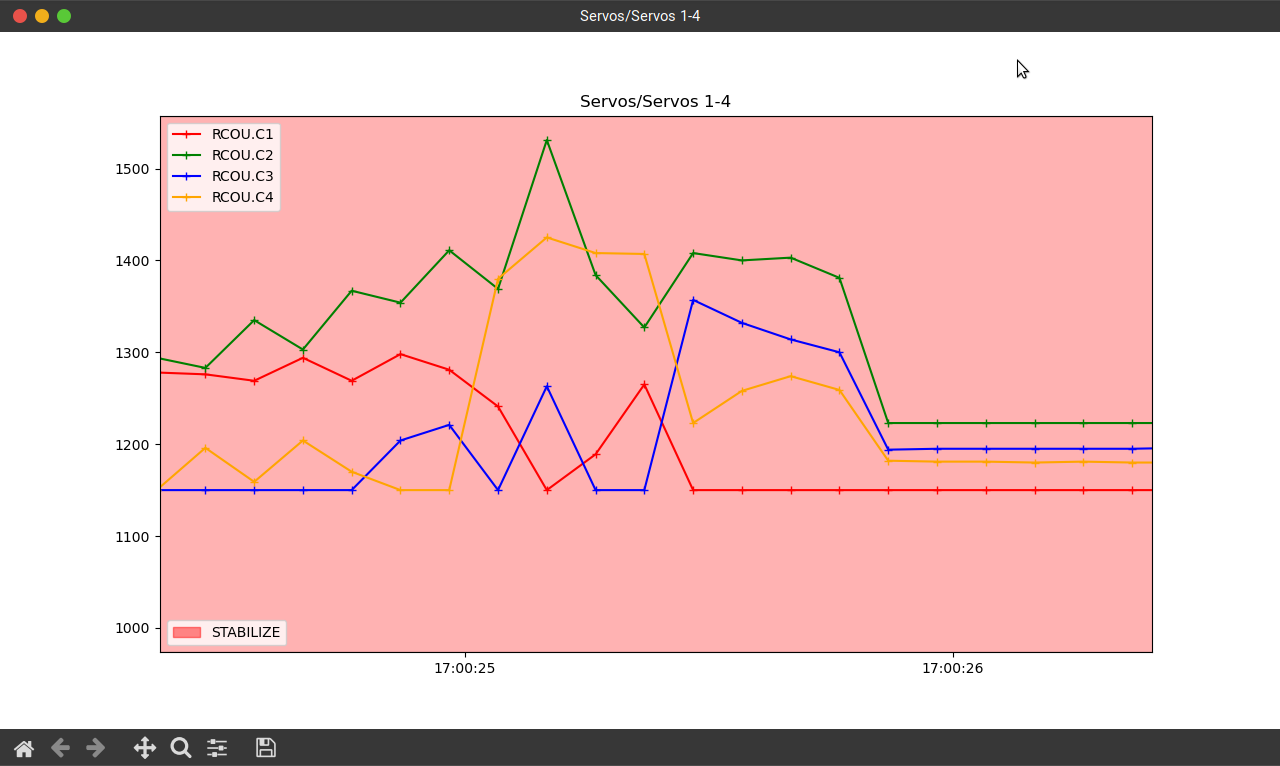
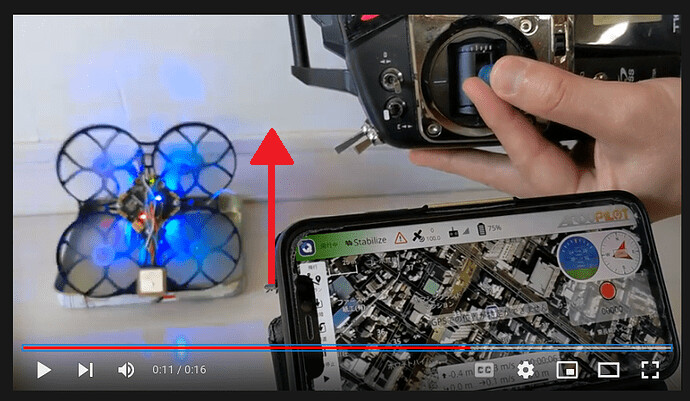
The quad shows that it’s pitching nose up (positive angle of pitch in the log, and the artificial horizon in the video), however the rear motors (2&4) are increasing in RPM. So either, as @dkemxr said, you need to verify the motor positions, or there is something wrong with the board orientation/calibration. When you move the quad, does the artificial horizon move correctly? I can’t tell from the video what the front of the quad is so I can’t say what’s right.
@dkemxr
Sorry for using Japanese. “無効” in Japanese means disable.
When I checked it in a GPS available environment, “X/Y Position Control” was also disable.
Then the motors are not correct. The FC sent the signal to what are identified as the rear motors (2&4) to increase in an attempt to stop the nose up attitude, but it appears that thrust happened in the front.