Hello, First copter build. I have been a fixed wing pilot with arduplane for many years but the tuning of copter is challenging me. I have installed a SpeedyBee F405 mini and Matek M8Q-5883 GPS/Compass into my Flywoo Explorer LR 4" quad. I have done successful autotune and POSHOLD works great and locks in.
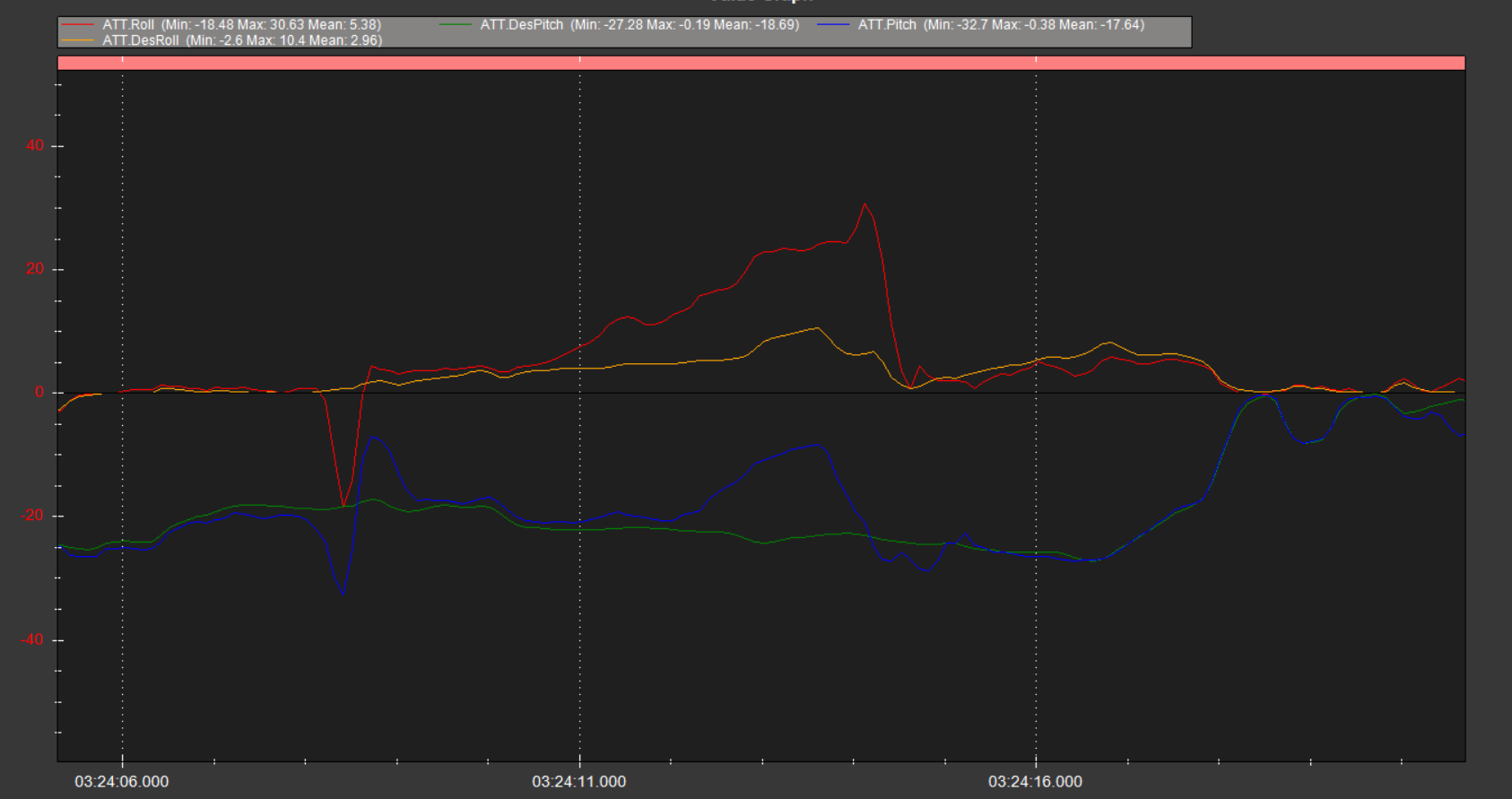
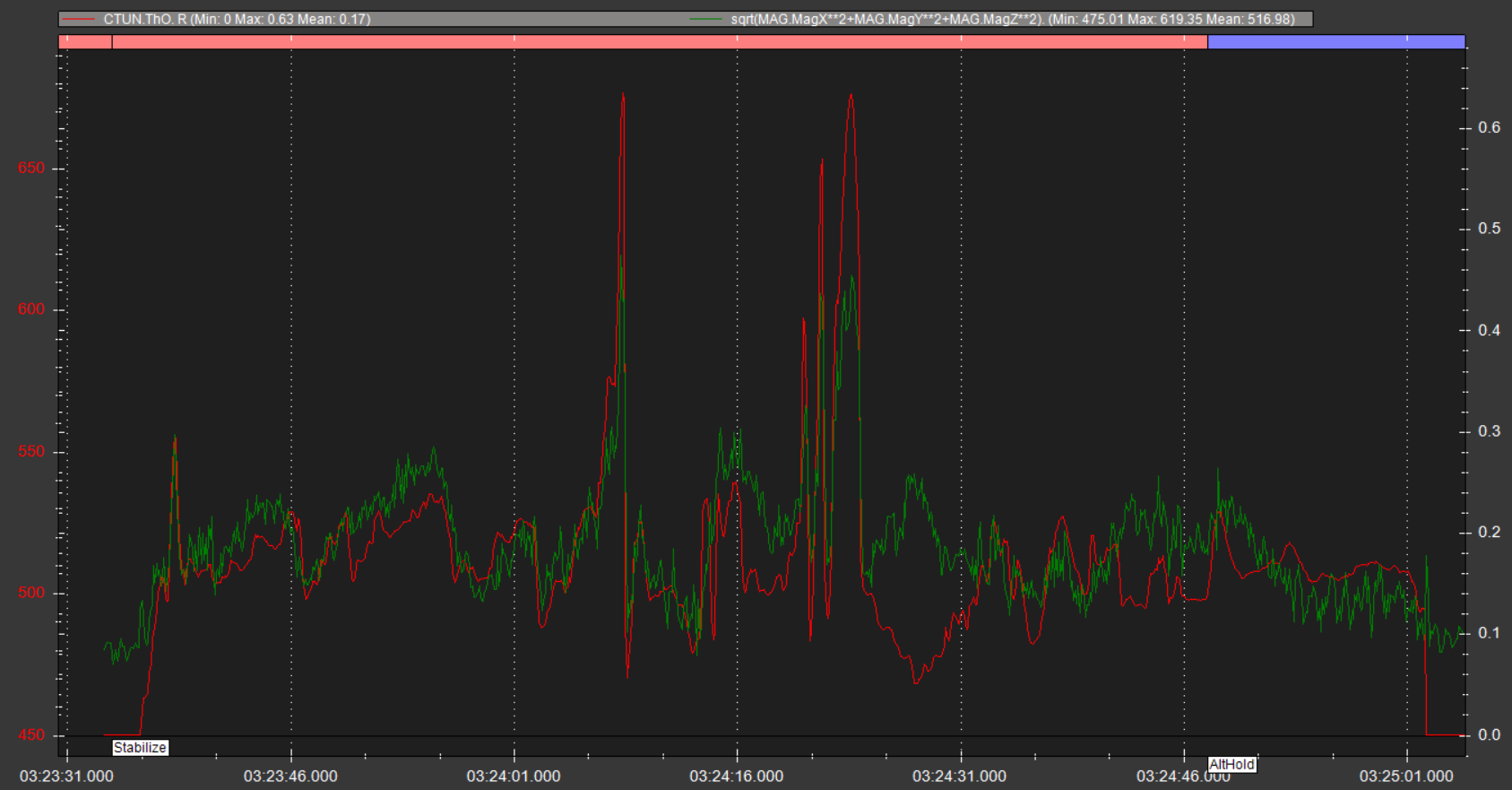
I have noticed some erratic pitch movements when I punch out when in STAB mode. Also, in ACRO, the quad tends to get a little uneasy. I’m unsure if I have vibration issues or if I need to tweak the notch filter. I am looking at the data but I don’t see anything glaringly obvious. Then again, I am not used to tuning for vibration, filtering and PIDS. Can someone take a look at my log and give me advice? It would be greatly appreciated.
Here are my PIDs as well.