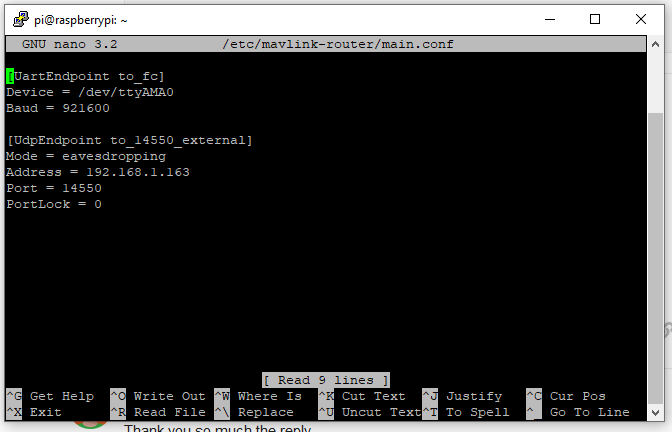
I tried that one and was able to save the to the file using the command you stated.
But does’t seem to work when my Rpi boots up.
I still need to ssh my Rpi & type the command in udp format before i open the MP in order to see the mavlink signal.
The ipaddress i stated after the Mode is the ipaddress of my PC running MP.
I compiled and installed from source, maybe i am remembering it wrong, i’ll take a look tomorrow and see but i am pretty sure mavlink-router.service was created when compiled and installed.
Did you compile and install it from source?
NO. I didn’t because I only follow whats in the ardupilot documentation to setup the mavlink in the companion computers.
Sorry I didn’t get what you mean when you say “compile and install it from source” because I am not that kind of developer skill. I assume you are.
After the connection to Apsync , the server application will start the port to redirect the mavlink
comunication
1 Web server port 80
2 UDP port 14655 for ground controlo ( MP or QGC )
You can change the port/address configuration
$ nano /Apsync/start_cmavnode/cmavnode.conf
#Serial connection to pixhawk
[aseriallink]
type=serial
port=/dev/ttyS0
baud=921600
sim_enable=false
#Connection to ground control in udp
[to_mavproxy]
type=udp
targetip=127.0.0.1
targetport=14655
localport=14656
sim_enable=false
#connection to dflogger
[to_dflogger]
type=udp
targetip=127.0.0.1
targetport=14555
localport=14556
sim_enable=false
#connection to web server
[to_apweb]
type=udp
targetip=127.0.0.1
targetport=14755
localport=14756
sim_enable=false
timeout=9999999
You should not any changes to start, is ready to comunicate with a set of default ports
Don’t wrong the serial connection , and remember the set same baudrate (921600)
cmavnode and mavlink-router are 2 different things, that do the same thing. What i like about mavlink-router is that is configured as a service in the last release and is very handy to stop and start it as needed.
But i think cmavnode is as good as mavlink-router, i just never used it.
I want only say that probably mavlink-route is not installed. Check if cmavnode is launched in rc.local
In this case you can configure cmavnode.conf instead of /etc/mavlink-router/config.d
They do the same things