Yes, I used some of your previous coaching on the FRAME CLASS.
Yes, we have H_ parameters now!
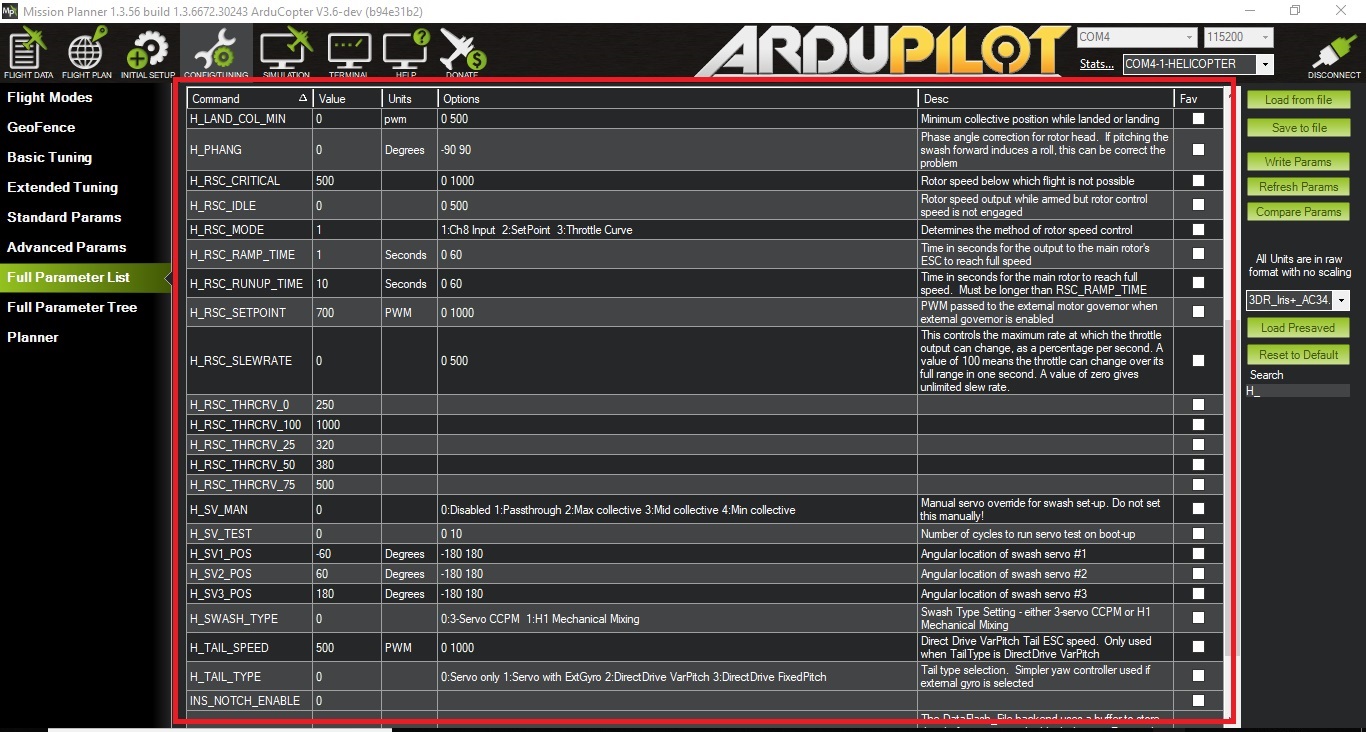

Does FRAME_TYPE look right?
Code doesn’t use frame type for Tradheli frames. I have usually seen a 1 or 0 in that parameter but it doesn’t matter.
I’d say the board is running, you got heli params, go ahead and set it up the normal ArduPilot way now. You’ll have to set SERVO6_FUNCTION to 31 instead of SERVO8 because the mini-pix only has 6 SERVO outputs.
Assuming you can calibrate everything, which means the drivers are working at least partly right, it should go.
How about inserting an SD card, what would it Log, if anything, if I’m not launching?
And my question about the FC being mounted backwards? White Arrow to the rear.
It won’t log anything until you arm it. No sense doing any logging until you do the setup and see if it all works. Logging at this point tells nothing. The main trial by fire is if the drivers are going to work for the hardware that’s in it. And you won’t know that until you do the complete setup and see if you get calibration failures or not.
It is now not a RTF model anymore. Start here, from scratch, and go thru it start to finish
http://ardupilot.org/copter/docs/traditional-helicopters.html
LOL . . . RTF it NEVER was!
Hate to keep asking about the MiniPix being mounted backwards but will this confuse the calibration or should I position it opposite during the 6-point calibration, when it asks Nose Up and then Nose Down?
Before you do anything - in the Full Parameter List if you see a Reset to Defaults button, do it. Make sure anything that might have carried forward is wiped out.
Being in the frame backwards doesn’t make one bit of difference. Just set AHRS_ORIENTATION to Yaw180. And make sure if your compass is backwards to set the compass orientation too.
Have fun! Now the learning curve gets really steep.
he may want to disable the compass in the pixhawk if he has an external compass in the GPS.
Sorry guys . . . it’s me again.
I just calibrated the bird and these are the messages I’m getting when I power up.
I need to make these go away, without disabling ARMING_CHECKS.
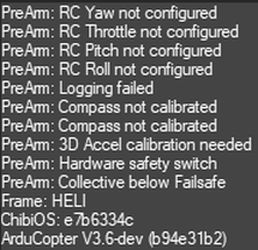
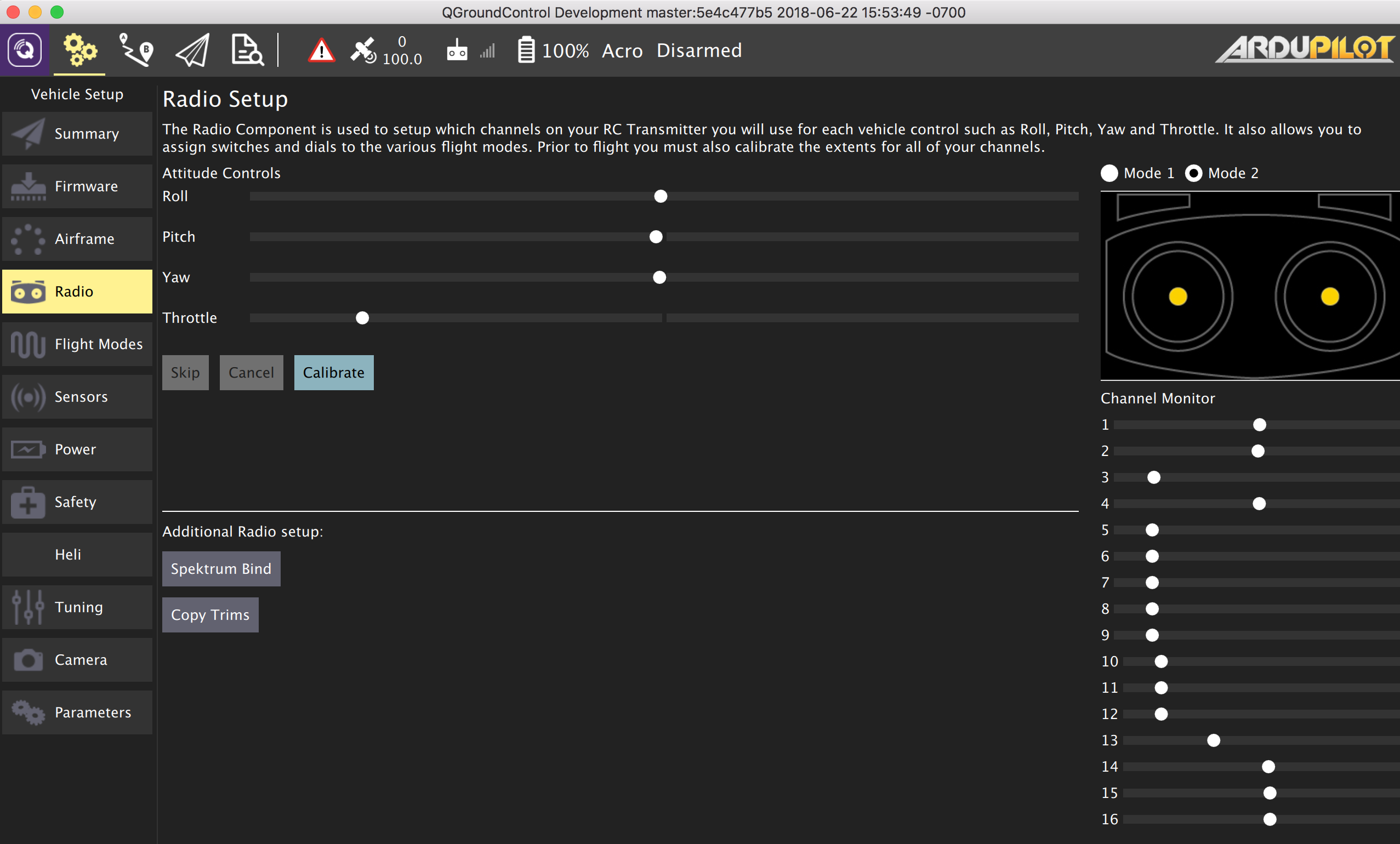
@JEFFGORDON The prearm message saying collective below failsafe is telling me that it may not be seeing your transmitter. Please verify that your channel in signals are active by going to the status tab in the lower left corner of the Flight Data Tab screen in mission planner. Scroll right until you see chin1…
They will be in PWM units. move your controls on your transmitter and verify they change values on that screen in mission planner
also post your most recent log file
Logging failed because you don’t have an SD card in the slot, and the rest of the errors are normal stuff you’re going to get until you do the complete setup from start to finish. And this includes not only all the calibrations, compass dance, RC cal, but also setting servo limits, pitch limits, etc…
It appears the board is running normally - otherwise it wouldn’t even recognize that you got a compass or accels. So it’s just a matter of studying the docs and doing the setup 
Yes, Tx calibrated and being read by MP
Will do . . . but . . . I was under the impression that no logging will be written to the SD card until AFTER full on arming?
@JEFFGORDON The prearm message saying collective below failsafe is telling me that it may not be seeing your transmitter. Please verify that your channel in signals are active by going to the status tab in the lower left corner of the Flight Data Tab screen in mission planner. Scroll right until you see chin1…
They will be in PWM units. move your controls on your transmitter and verify they change values on that screen in mission planner
also post your most recent log file
Yeah, but it checks to see if a SD is present. If it isn’t it will say “logging failed”.
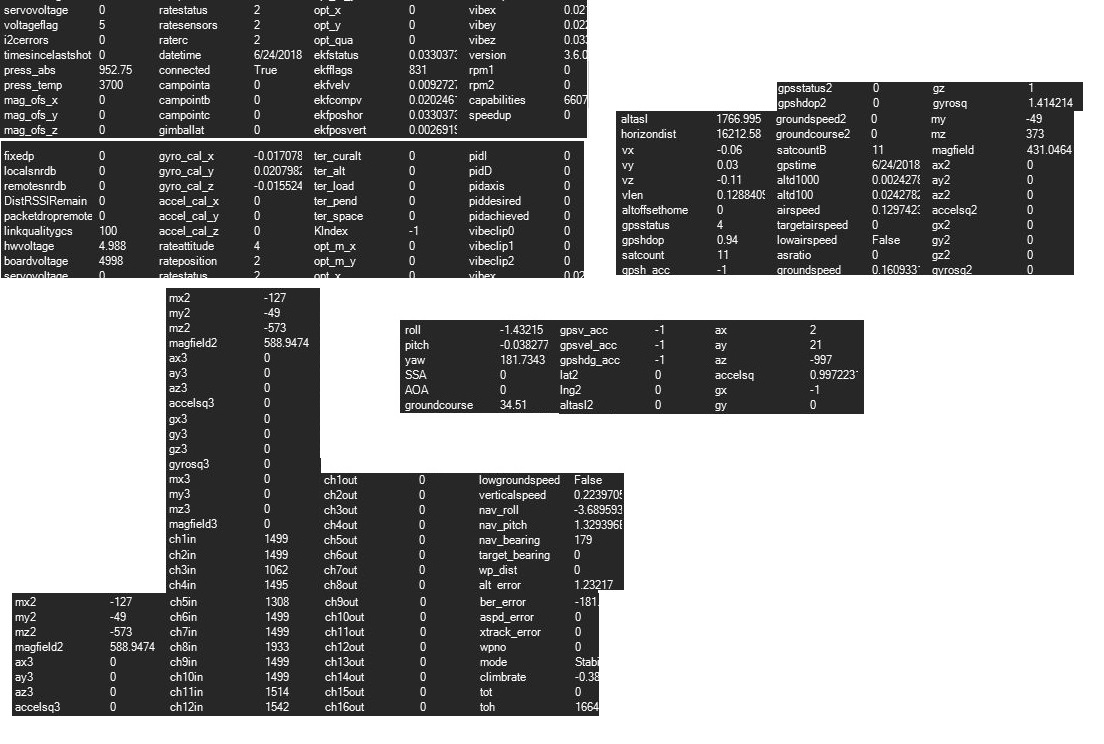
@JEFFGORDON So yes it appears that you have RC channel info coming in. It is odd that all channel out values are zero. At least channels 1, 2, 3, and 4 should have values out.
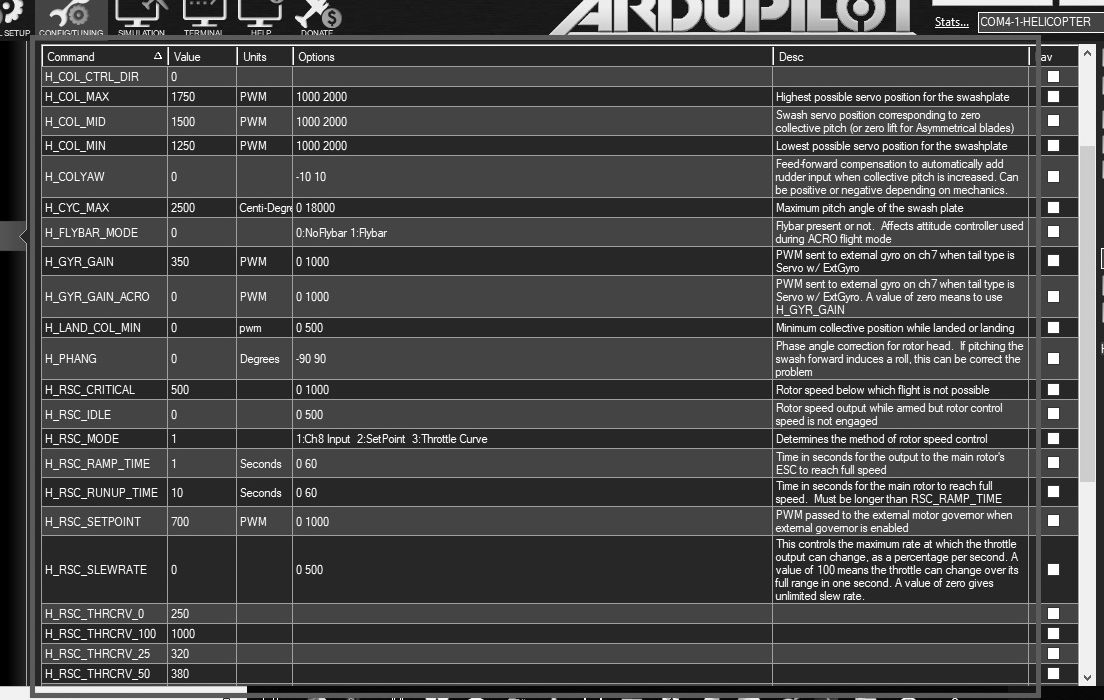
Send us the latest param file now that you have a good load and have done the calibrations.
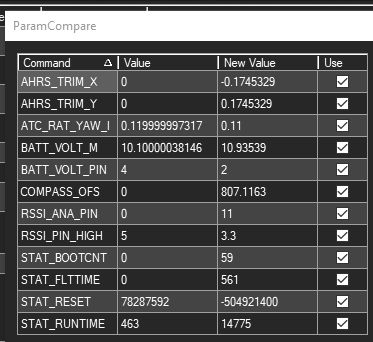
Here is the Default Parameter file I loaded as well as the Parameter file from “steve”, someone I located that purchased one of these helis. His param file is untouched from the way he received it but unfortunately he states that he has no throttle control other than Full On or Full Off using the Tx switch assigned as throttle control override. His could be a Tx setup issue though as he did change those original configurations.
Here is a snapshot of a Param Compare I ran on the 2 files. To my untrained eye, I see nothing of great consequence. Wonder why some values are clear out to 11-12 places?
Default_MP.param (13.0 KB)
steves parameters.param (13.5 KB)
One late question . . . What if I could find someone that had a MiniPixhawk that was up and running on a completely different brand of heli but same type and configuration and then I loaded their Param file onto mine.
Is there any chance it would work? Looks like I wouldn’t be any further behind than I am now?
I suppose I’d have to re-calibrate the GPS to my location.
In order to troubleshoot your issues I would like to see the latest param file on your controller. So I would like you to download the latest copy of params from it. Use mission planner to connect to your controller and save them to a file. thanks.