It is likely Brand-X got the electronics from RadioLink pre-configured, since they already refused to send out a param file for it. I’m guessing they don’t have it. I’m guessing this product is made in a one-room shop in China with some long tables and a bunch of workers lined up putting them together out of stuff they get from other vendors. They box them up, China Post shows once a day and out they go. It is likely there is nobody there that actually knows much about it.
If every thing fails PM me and I’ll give you my shipping address. Jerk that minipix out and send it to me and I’ll see if I can fix it. If I can get to the Nuttx shell in it I can hack it. It would be quite interesting to see what RadioLink did with that thing, and with the firmware.
@JEFFGORDON The hardware is not supported by ArduPilot builds. It has a different processor and hardware in it compared to the Pixhawks. Thanks to ChibiOS we can get it running with ArduPilot.
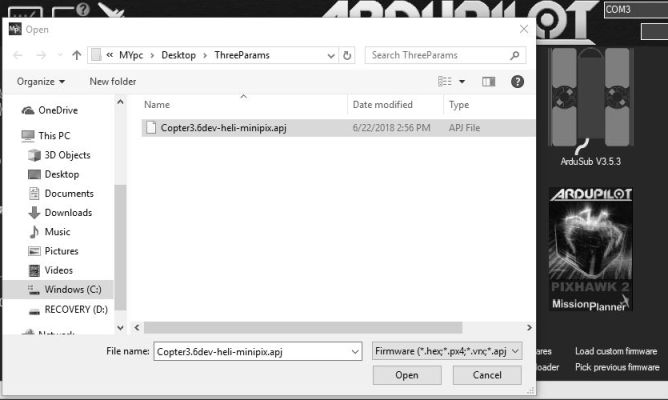
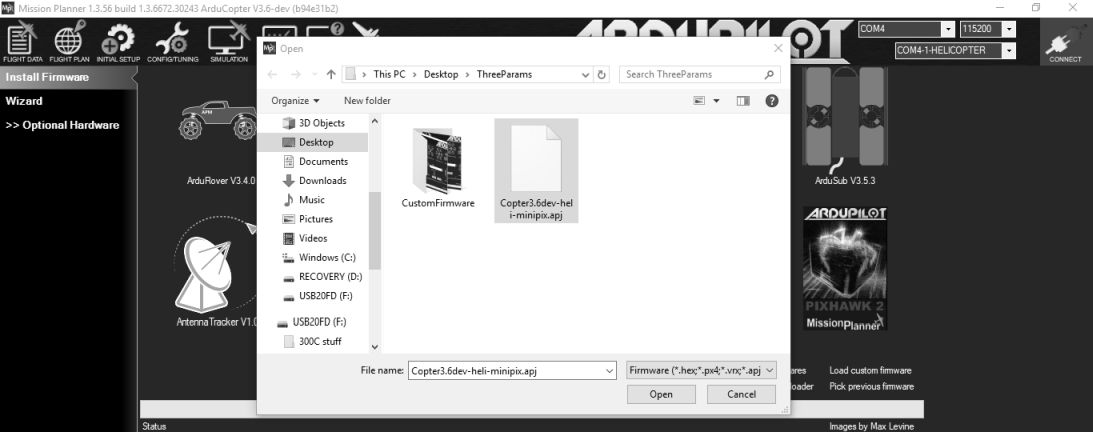
Get the latest beta Mission Planner program for your computer from ArduPilot. Download this firmware build I just made, and install it with the custom firmware installer in your Mission Planner program. https://drive.google.com/open?id=1mLVRSkpcPBRS3v3B2O221JlL3gmd0KOi
Now you should be able to configure the heli as normal with ArduPilot.
@ChrisOlson a couple of months ago we tried to talk with Radiolink to get their controllers on ArduPilot, but after a initial progress things stalled/stopped.
IMHO, best would be to put a good well known FC and start from there, no need to waste time with a questionable FC, even if it is easier to do with hwdef/Chibios.
Yeah, I checked over on RC Groups as there’s usually somebody trying to get something to work, and there was some guys there that have these and trying to get them running with ArduPilot. It took me all of about 15 minutes to whip up a build for it.
So it would be interesting to see if it at least loads the firmware, all the hardware drivers work and it kinda runs normal. Somebody must’ve fiddled with one because the mini-pix was already defined for ChibiOS build.
Yes, Chris I’m over on RCG too but you guys over here are more knowledgeable and no trolls.
The only real reason I’m even messing with this FC is because it’s a learning experience for me picking up tidbits from you guys.
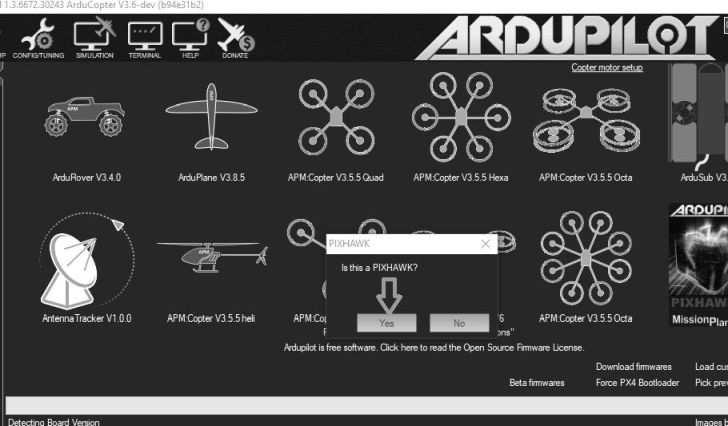
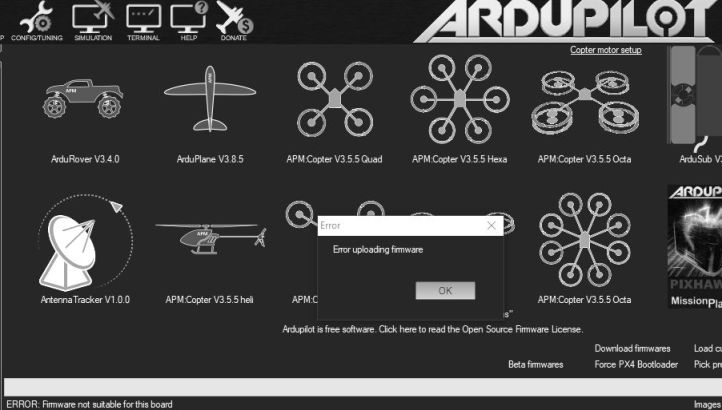
Anyway, I tried to load the custom firmware (using the genuine MP) from Bill Geyer but not sure I got all the responses correct.
Maybe somebody that knows more about Mission Planner and why it’s doing that interrogation process can chime in here. Unfortunately (or fortunately, whichever the case may be) I found Windows to be fundamentally broken and unusable over 20 years ago. I’m an old UNIX/linux guy.
@JEFFGORDON there’s lots of things to learn when the hardware is working fine, now this case is a real trial by fire, trying to get an unknown system to work…even when we can “theoretically” get it running standard ArduPilot.
Can you put some pics from the heli and from the FC, that can give some clues…
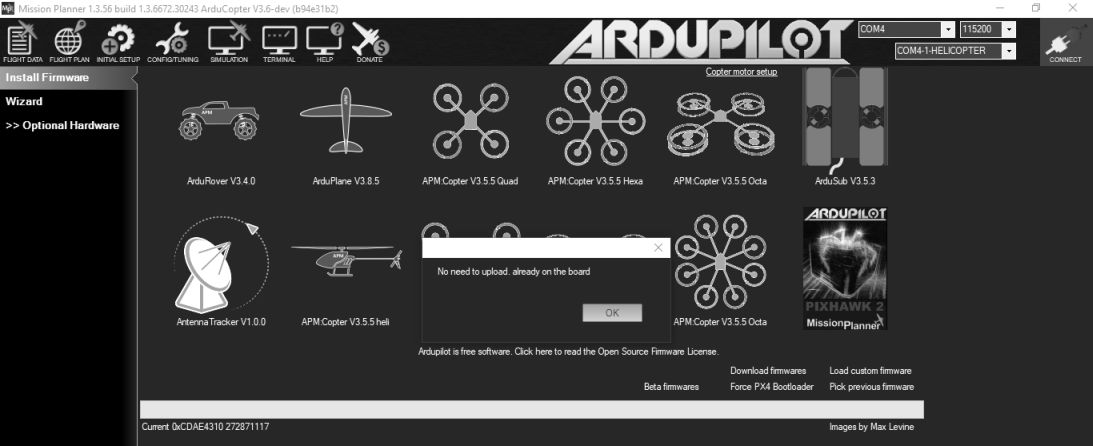
It would appear that there’s something fundamentally wrong with MP? If you clicked on the Load Custom Firmware link and selected that file, why does it say do you want to load Heli 3.5.5?
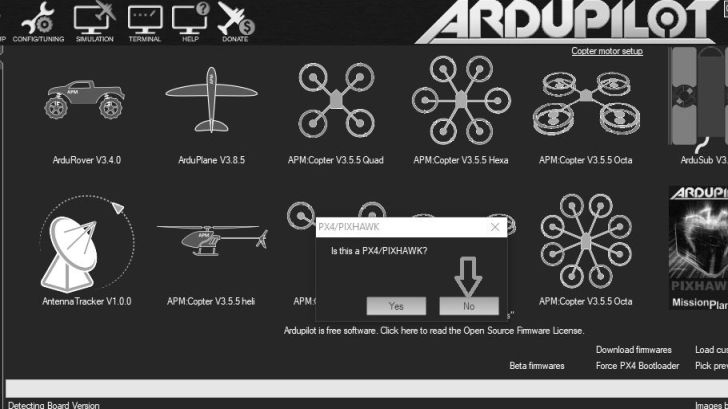
And why is that picture of that spider there with a Pixhawk2 ad? This board is not a Pixhawk2.
I actually loaded the binary of that file in an old Pixhawk 1 and it worked with QGC.
@ChrisOlson
I may have the pics out of order . . . maybe a newb mistake but I’ll try again. I use this MP on my Skyviper but that may be a whole different ballgame.
btw . . . if I insert a SD card would it record any pre-arm Logs or errors or would that only be viewable in MP heads-up display?
Just to summarize . . .
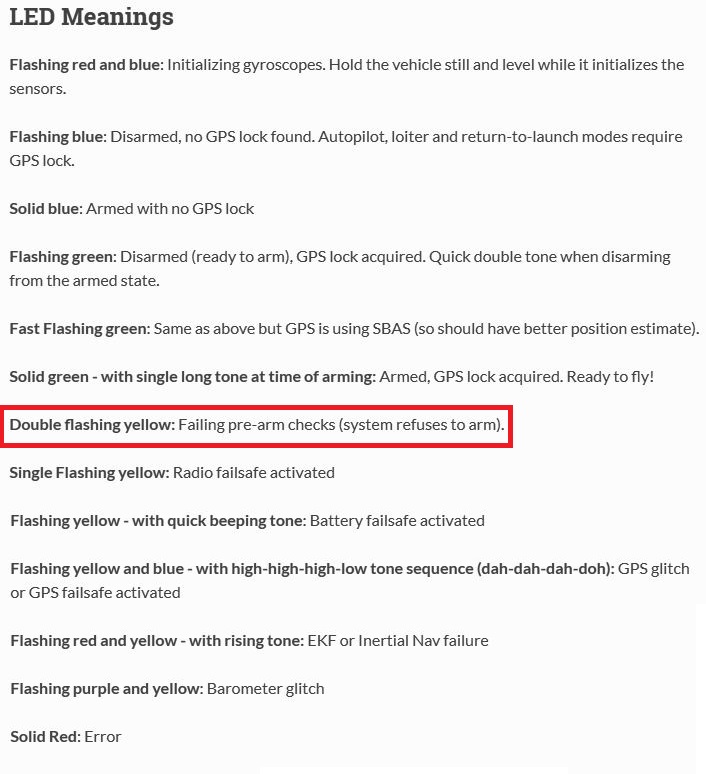
I only get as far as Double Yellow LED after power up.
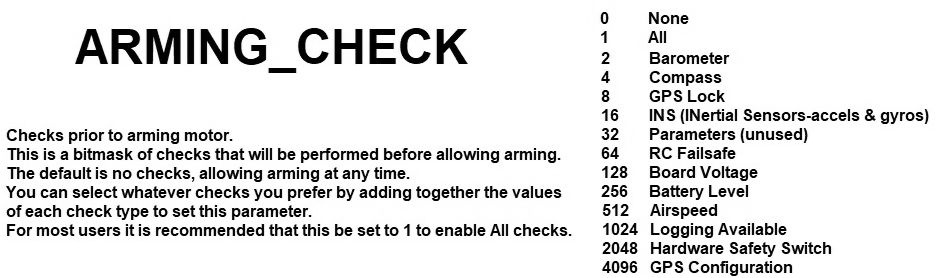
Sometimes, and I don’t know why not always, if I (Disable All) ARMING_CHECKS . . . I can get the rotor to spool up. I have tried using the process of elimination on some of the ARMING_CHECKS params.
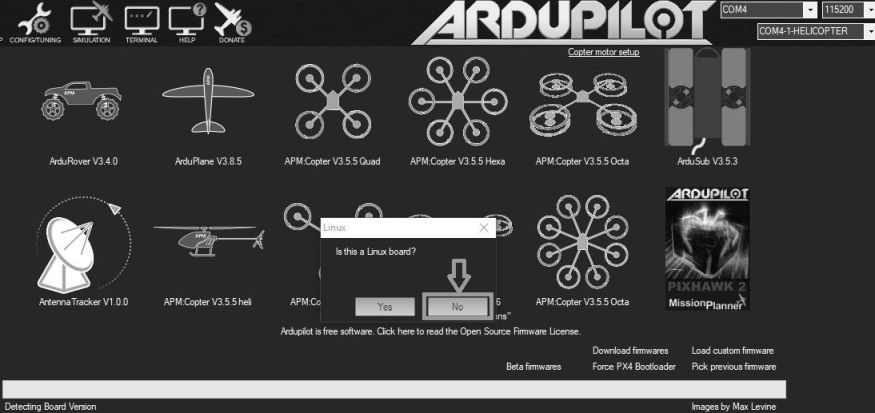
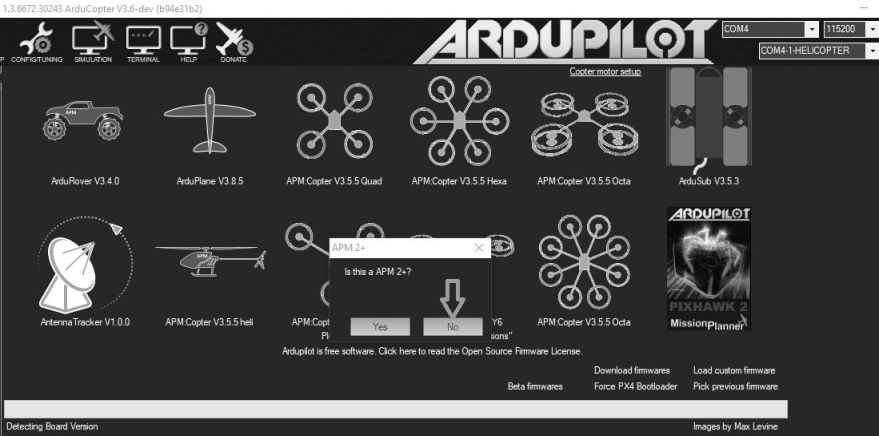
Yeah, you should be able to click on that Custom Firmware link, select the file, and it should not say anything about Heli 3.5.5. And it should not show that picture of a spider because I think that means it thinks the board is a Pixhawk 2?
There should be some sort of message there that says what it thinks the board is. I don’t why know it’s doing all that interrogation about what it is. I’ve never seen that before.
But I don’t know a lot about Mission Planner. I got it installed in my linux computer but I never use it.
Basically nothing is going to work right until you get that firmware out of it and real firmware in it. Disabling arming checks or trying to adjust parameters will do nothing. It needs to be wiped clean and get that build in it to even have a chance of running in a heli. And even then it’s not a good chance because there might be driver issues with that board.
I could take pics but this was delivered as an RTF and sometimes spools up if ARMING_CHECKS is disabled. All connections are good and everything looks fine, reseated all connectors. The only thing that looks a little odd and don’t know what effect it has, but the FC is mounted with the White Arrow marking on top, to the rear of the heli and not the front as I thought it should be. Might this throw calibration out of whack?
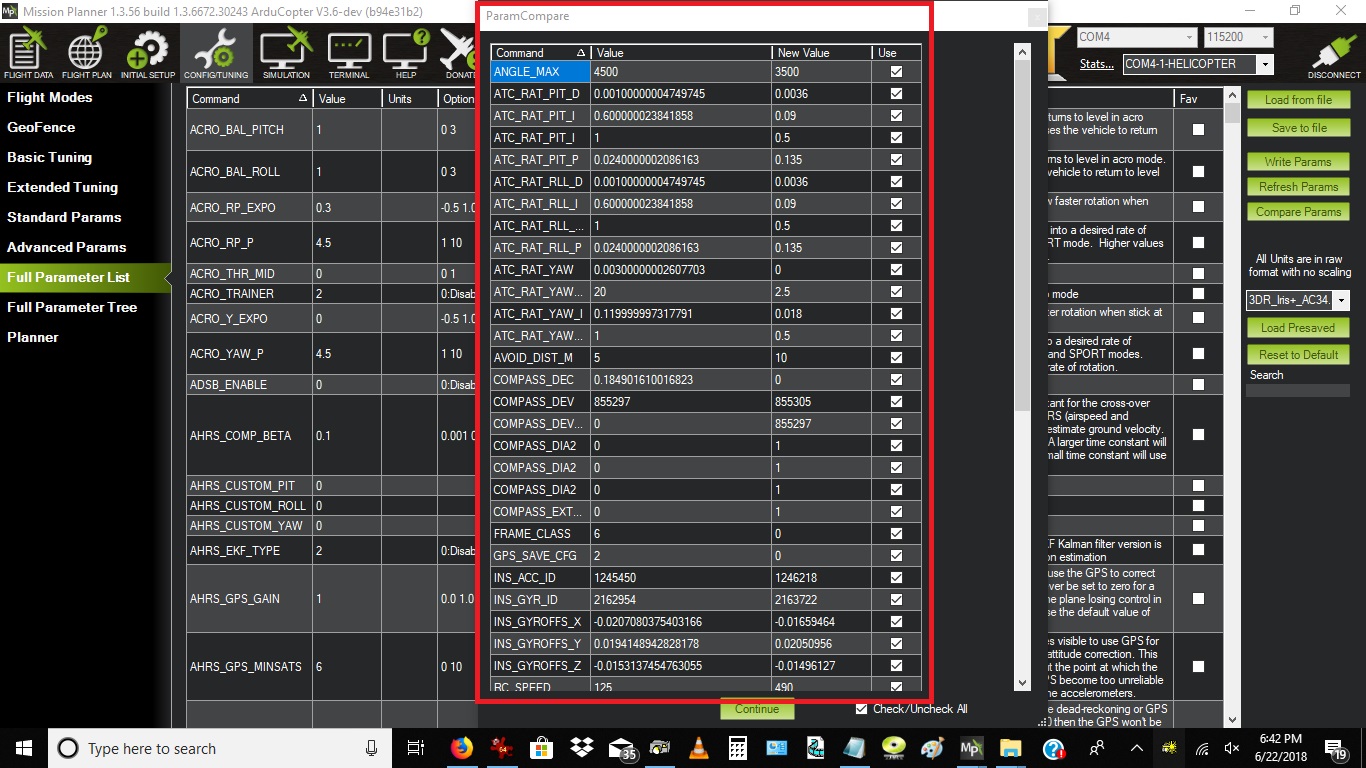
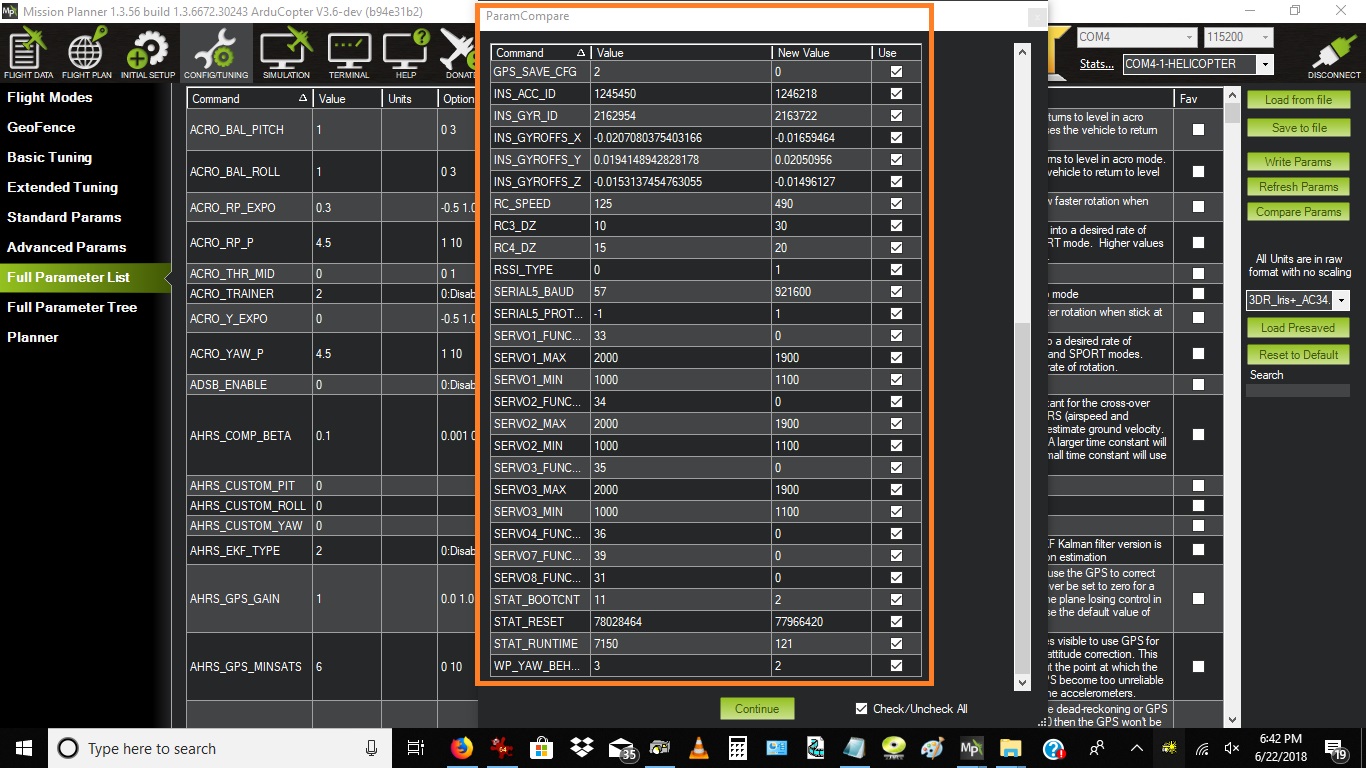
Okay, I did a Param Compare on what is currently on the board to what was on the board with the cloned versions.
Am I correct in assuming that loading the custom firmware loaded these current Params?
Well, it definitely has the right defaults for the servos. I didn’t see any params starting with H_ - do you you see those? Those are your helicopter parameters. If those are there, go thru the setup procedure for heli’s and see if it works now.