Hello, I’m a newbie and need some help. I have assembled a rover using 24v motors and was able to use a RC (FLYSKY FS-i6X) to move the motors with SERVO1_FUNCTION and SERVO3_FUNCTION = RCPassThru. The RC does not move the motors or the green bars in Mission Planner when I change the servo functions to “Throttle Left” and “Throttle Right” per the Ardupilot instructions.
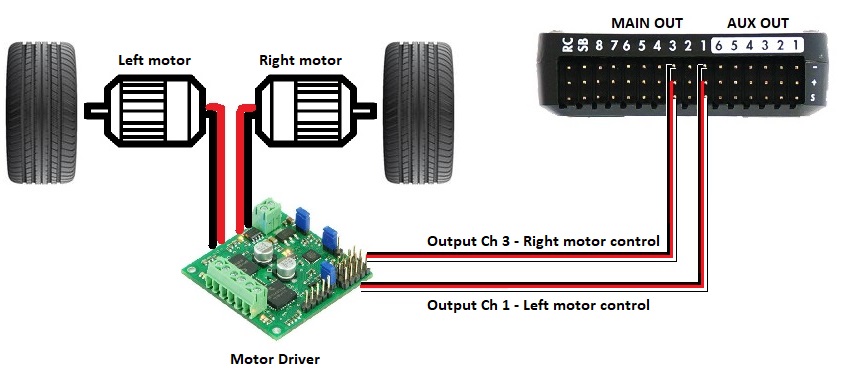
I connected a QioTek Zealot H743 and Cytron SmartDriveDuo-30 according to this:
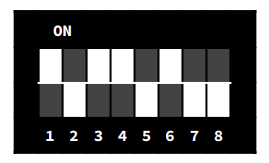
This is the way I set the DIP switches on the Cytron SmartDriveDuo-30:
I changed the RC output mode to PWM. I would greatly appreciate any help. Thank you!