I have been using AC since 2.8, and tuning was never a problem for me. Now I built a 5Kg asymmetric ( v frame) X8 and things aren’t going very smoothly…
My problem is the following. Although the ROLL axis can be tuned nicely, pitch is a whole different story.
No matter how high I go on PIDS I can easily pitch the copter forward with my hands (yes i live dangerously) and it generally doesn’t resit much. It is much harder to tilt backwards though. My thinking is that this has to do with the asymmetry of the frame, and the extra leverage that the back engines have. (maybe?)
If I set my PIDS (P in particular) any higher I start having oscillations, but still resistance to forward tilt is minimal.
I have set the filters to 10hz as suggested in the documentation, and have tried auto tuning with AUTOTUNE_AGGR set to 0.1.
I have also tried tuning it manually which provided slightly better better results, but still Pitch is too loose.
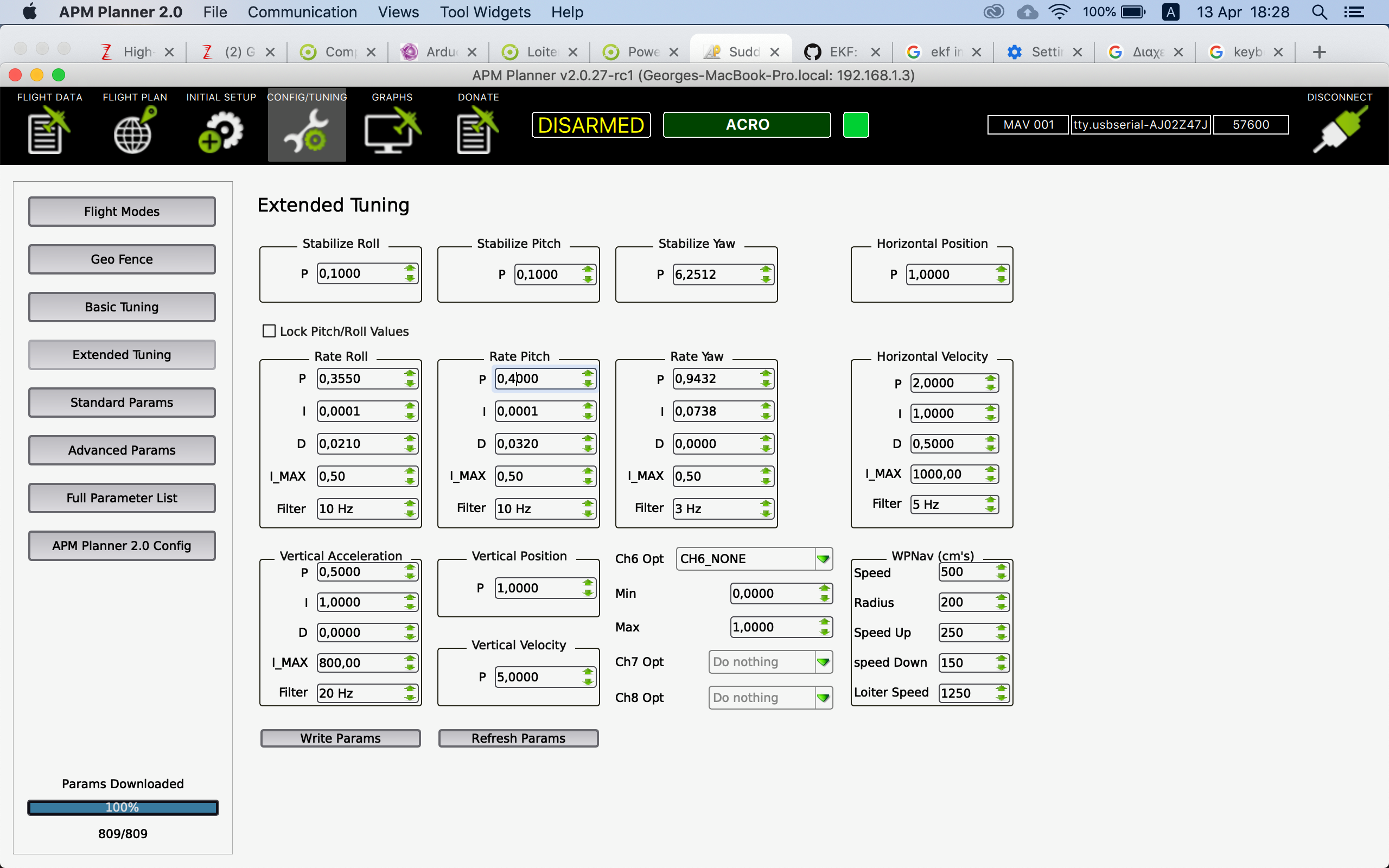
Here’s the best PID’s I’ve managed so far, pitch still being very loose (I term was 0 for tuning, later value was 0,0190) :
Weight is 5Kg400. It is nose heavy, i move a lot of things backward, but it remains slightly off.
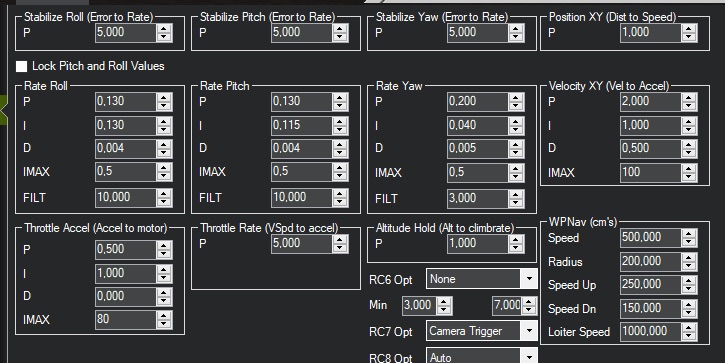
D term is a source of shaking. So mine is quite low. It is always a work in progress but I’m quite happy with it. I did the design and cut the frame with my CNC.
Nice build!! Your D Value is very low, that’s interesting… I’ll try those PID’s out.
Another question how did you figure out your CG ? Just the point where the diagonal motor to motor lines cross?
Also what frame type have you chosen in the config ?
And how much flight time are you getting out of it ?
I tried tuning it again using your PIDs as reference, Although the copter flies OK in acro, if I switch to Loiter or anything that requires auto level, it overshoots the auto level correction and starts oscillating severely. . I had to manually switch to acro to save it from crashing.
Have you ever encountered this ?
edit: I has been doing that with all pids I’ve tried
Ok solved: the wobble upon releasing the sticks was caused by this value ATC_THR_MIX_MAX.
I increased it to 0.9 and the problem was gone. I also decreased ATC_ACCEL_R_MAX to smoothen everything out. Now it flies like a dream.




 . I had to manually switch to acro to save it from crashing.
. I had to manually switch to acro to save it from crashing.