Hello community,
I am working on Octocopter with AUW of 24 Kg and 2.2 meters of Span from motor tip to tip. Arducopter firmware version 4.4.0 release is installed on Pixhawk Cube orange for this Octacopter. We are using Tmotor Flame 80 Amp ESC and Tmotor P80III 100kv motors and 34 inch propeller. My battery configuration is 12S 35000 mah battery pack. I have previously worked on Quad configuration drone with Arducopter and tuned it for stable flights.
With Octacopter I have limited experience and so need some help from community for better tuning. Here is my progress. I have been able to hover this OctaCopter where we started from mission planner’s “Initial tuning” page and got initial PID gains. But we observed these gains weren’t sufficient for stable hover so we had to increase RATE controller gains and decrease Attitude controller gains drastically for somewhat stable hover.
Here are my observations from current gains:
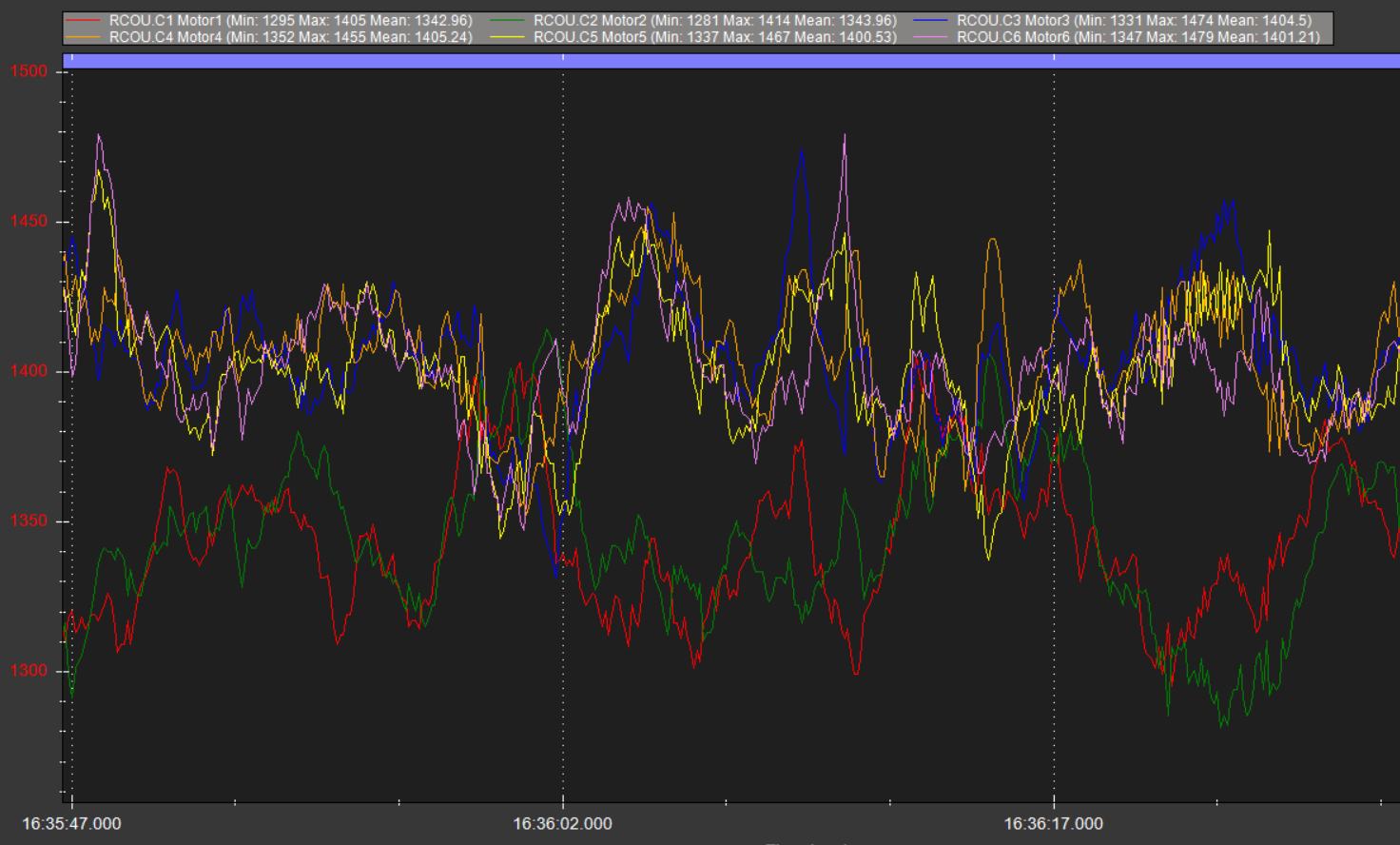
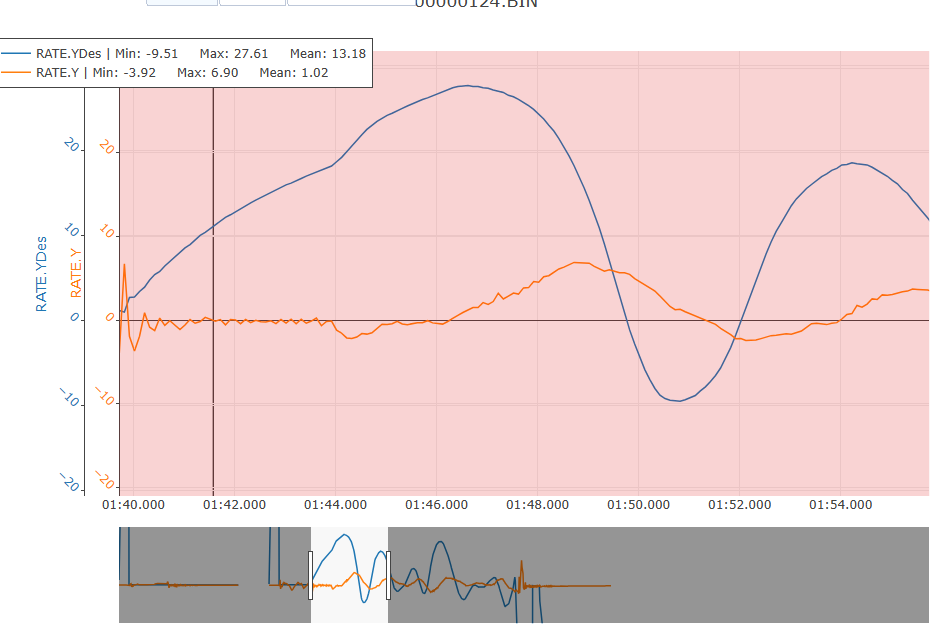
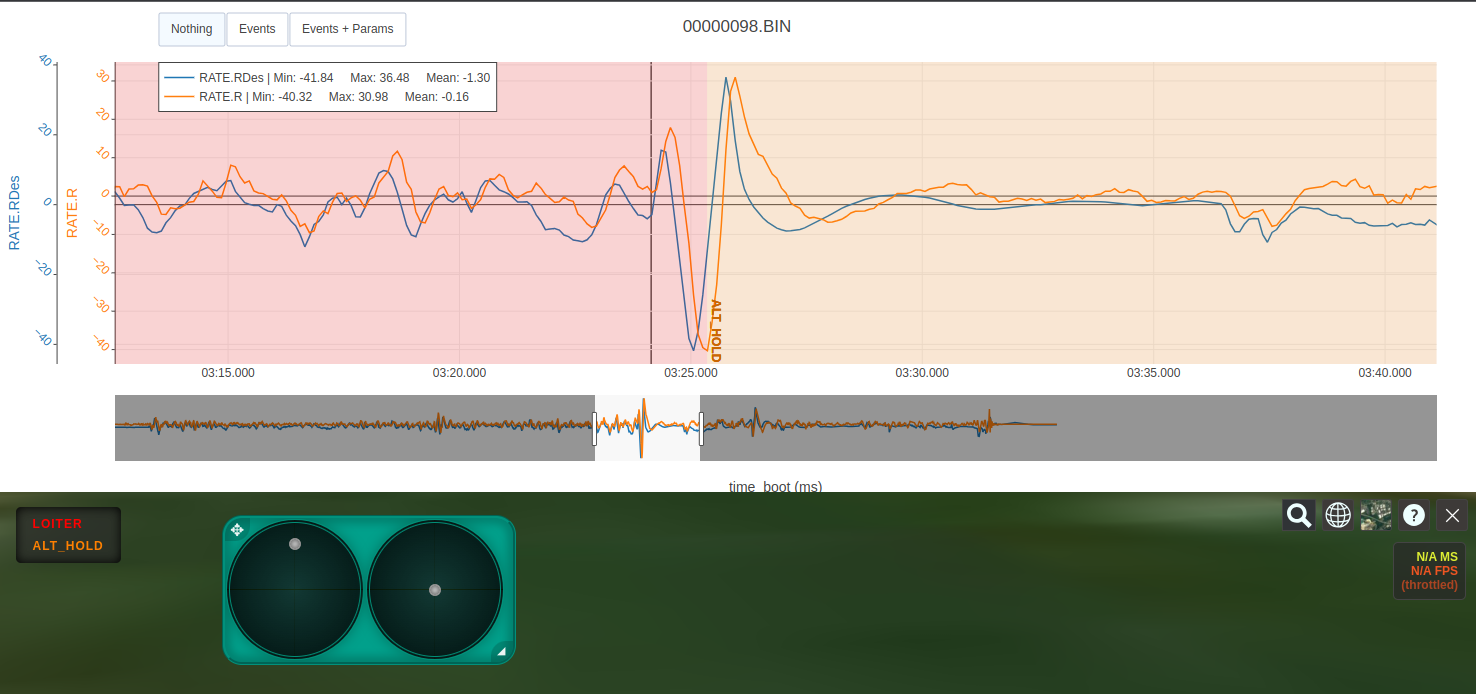
- In loiter mode drone oscillates when I give roll and pitch commands from radio stick and release the stick. This can be clearly seen in logs where desired and actual roll/pitch increases rapidly without any stick inputs. What can be the reason for this oscillation? Once the oscillations start UAV becomes pendulam and takes time to again level itself in loiter mode. This isn’t observed in AltHold or Stabilize mode.
- Drone also oscillates while gaining altitude during takeoff so we had set WPNAV_UP ascent speed to low velocity right now.
- We also tried Auto tune with this flight but it failed with Auto tune aggression of 0.075 saying “Failed to level. Manual tuning required”. Then we reduced auto tune aggression to 0.05, we got some tuned results on roll axis only, with which we again did test takeoff and hover where we found osillations were increasing. How can we improve autotune functionality for gaining optimal results for such big vehicle?
I have went through the Arducopter wiki for manual tuning but need some better assistance from our current progress in tuning to optimum tuning of this vehicle.
Log file Link : 00000098.BIN - Google Drive
Another log file : 00000094.BIN - Google Drive
Please help me ahead on topic.
@Leonardthall @rmackay9 @xfacta