May I ask the ESC you use is FOC or just a BLDC ESC? to my experience without FOC ESC it is hard to tune a big copter (just my experience).
I never have experience with Cube but I use to use CUAV v5 plus. Big quad seem to hurt the IMU internal damping, and I never get a good tune with it. So it work well for me with FC that had no soft damping. for example CUAVnano or Pixwhawk6C hollybro.
Regarding damping, our damping on FC is hard dampeners (Double sided Foam). Our vibration levels are also low with this setup.
The only point which we are strugling with right now is may however we change the gains, response of UAV is sluggish and not tight which is leading to unstability in loiter flight modes. Please do share your insights post analysis my above shared logs. Thank you!
@xfacta We did Autotune after performing quick tune with above setup and post that we had rock solid stable flight with those gains. Thank you so much for guiding us in right direction.
(P.S I deleted previous posts since we did solve those problems and didn’t want to pileup the thread.)
We did 50% aggressive and 100% aggressive Auto tune and got two sets of gains.
We just need some help now in two problems,
We performed Auto mission with these Autotuned gains, with WPNAV speed of 5 m/sec, drone flies very stably but when we increase speed to 8 m/sec, pitch and roll axis had occassional oscillations once drone reaches to maximum velocity of 8 m/sec. Can this be because of aggressive tune or something else?
In loiter flight mode, while pilot gives commands to pitch/roll and leaves stick then there is twitch been done by drone post coming to halt. What can be the reason?
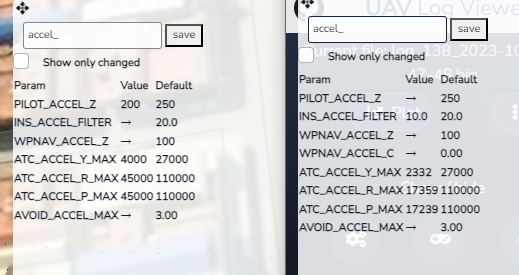
I compare your param with my drone’s 34-inch propeller.
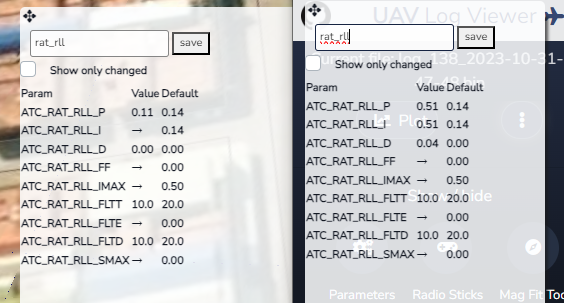
look at your ACCEL_xx param is very low. and you had put down the filter to 10Hz
And your rate is very big to compensate the slow respond of accel and velocity
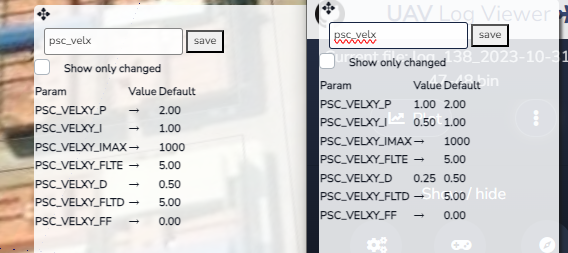
and to improve loiter you have put a very low PSC_VELXY this will improve brake and manoeuvre.
I have been in your position now. the same params as your craft. but it is not a very stable copter at all to me. this is because of the flight control that have internal damping ( you are not going to trust me but I want to say it again).
This is my quad 34Inch that I compare your param with.
The PIDs rates and accels all seem to be working very well. The attitude control is very good.
There’s no right or wrong answer about what range or values they should be if they are producing a good result. Hot motors would be the only other thing to look out for, indicating D terms would be too high.
If you wanted to smooth it out a little you could lower the accels like: ATC_ACCEL_P_MAX and ATC_ACCEL_R_MAX to about 15000
That doesnt require any other changes or retuning, and you can always put it back to the tuned value for light payloads - or just decide to use whatever works best in all situations.
On the turns a couple of motors are just touching on minimum output.
You could lower MOT_SPIN_MIN to about 0.13 probably.
Just bump these up a bit:
PSC_ACCZ_I,0.5
PSC_ACCZ_P,0.25
but they are not a big problem at all. It might depend if you fly more with a payload or without.
I have not seen any issue with leaving these in place, just in case you need to check for any changes in the future.
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4 // or even just set 0
Logging can go back to normal too, we didnt even use the PID logging since Quick Tune did all the hard work LOG_BITMASK,176126