It seems like it should be easy, but I have not been able to set a channel on my drone to output 0-2.6Volts. (right now it is 1.3V-2.6V)
Under “User params” I have chosen “Gripper” on RC12_option.
Under “Servo output” my function is “RCIN12” and the green bar moves with my knob AND the voltage on drone changes from 1.3V-2.6V.
No matter what min and max… The out is always the same range.
are you triyng to get a variable voltage output from the servo pin? the servo pins dont work like that, they can do servo pwm or GPIO on or off, but they cant output analog voltages.
you cant filter servo pwm to an analogue voltage as it goes from 0% = 1000ms active to 100% = 2000ms active so all you will see is a slight difference.
Ugh. Thank you!!! You’ve explained why I’ve been beating my head against this wall. I’m trying to control a 3/4HP motor (yes, really) from the drone flight controller.
So it’s a brushed motor. Looks like that Motor Controller accepts PWM.
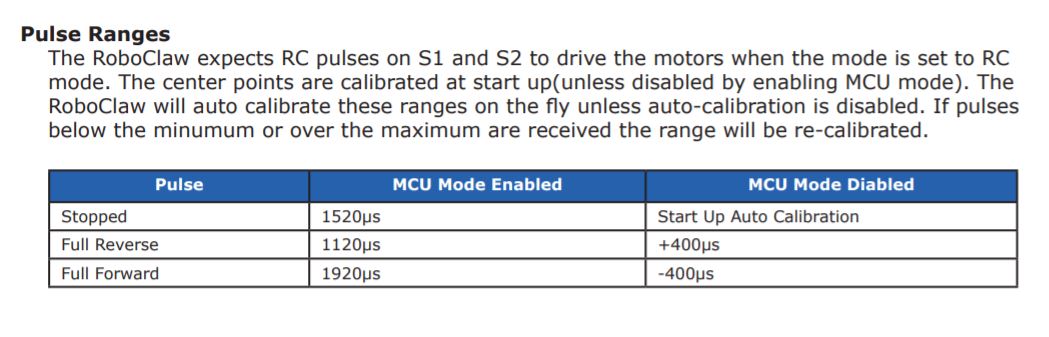
And this is entirely the wrong thread for this topic. But anyway from the manual:
RC Using RC mode RoboClaw can be controlled from any hobby RC radio system. RC input mode also allows low powered microcontrollers such as a Basic Stamp to control RoboClaw. Servo pulse inputs are used to control the direction and speed. Very similar to how a regular servo is controlled. Encoders are supported in RC mode, refer to the RoboClaw user manual for setup instructions.
When I asked the question I thought I was asking how to program Mission planner/Ardupilot.
It’s frustrating because I’ve been trying to ask the “experts” throughout the process. The controller company about the controller and the drone company about the Drone… And ended up with completely the wrong answer.
I think the key phrase here is “or other non microcontroller interfacing hardware” with regards to analog.
Of course you have a microcontroller interface with the Flight Controller. Looks like you are on the right track now. I think that controller will work.
This is close to what the Flight Controller will output as default running Rover firmware. So far so good.
That’s what that chart is more or less telling you. Your only real challenge with the controller, like all Roboclaw controllers, is to configure it properly (jumpers, switches, whatever) for use with a flight controller. You don’t need any bells or whistles, no mixing, just the basic configuration. The Flight Controller does all the work.