trying manual pitch tune 3 inch cinewhoop
firmware version stable 4.3.2
drone sliding all directions and not complete 100% tune
in full charged 2300mah battery
I trying taking stabilize flights try autotrim but not work
Are you saying the copter is not holding position?
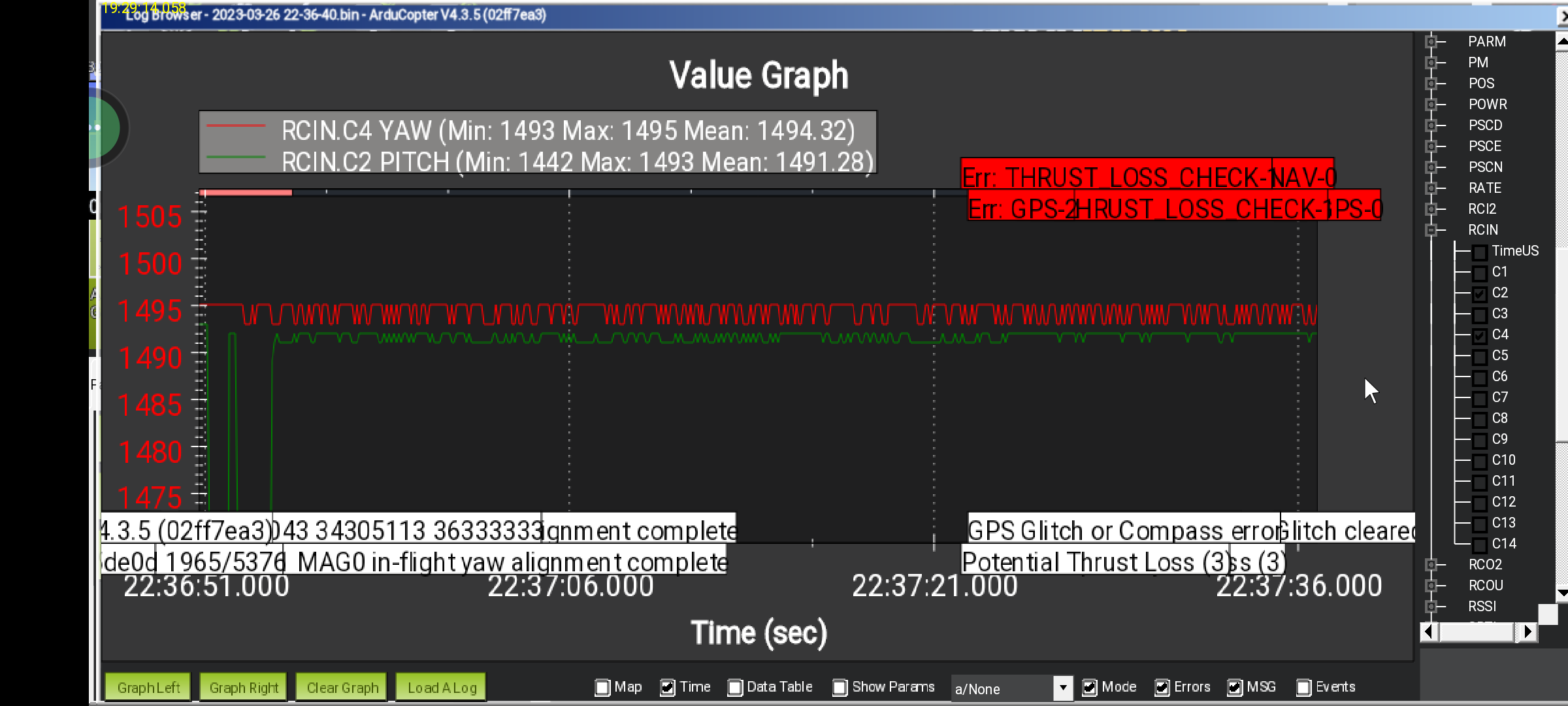
You have no GPS unit (or Optical Flow sensor) detected or working - it is impossible to hold position without one.
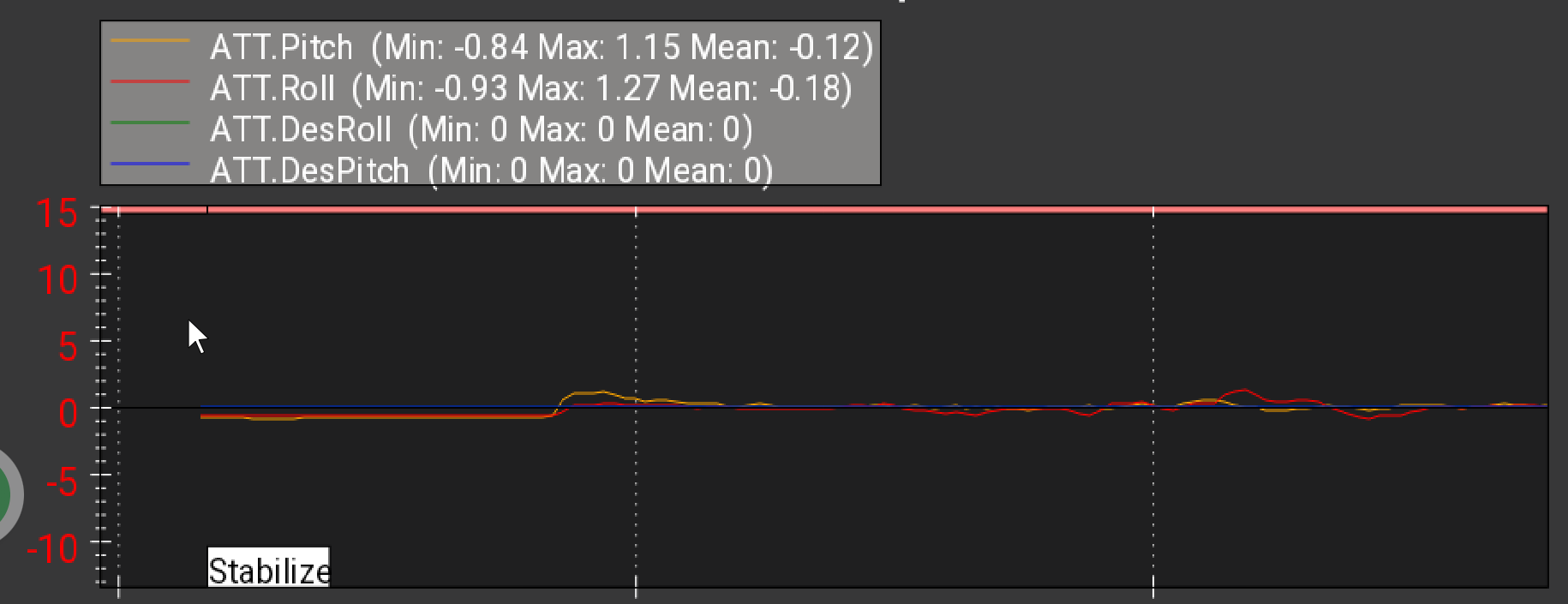
You are in Stabilise mode, so the copter will move with the wind or any disturbance.
You will also need to test in AltHold , but Loiter will need a working GPS unit or some other position source.
You can improve the performance in all modes by connecting to MissionPlanner, got to set up, Mandatory… Accel Calibration
Carefully level the entire copter, then press the Calibrate Level button
Also set all of these:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
BATT_LOW_VOLT,14.4
INS_ACCEL_FILTER,10
INS_GYRO_FILTER,75
INS_HNTCH_OPTS,0
INS_HNTCH_REF,1
You can set
ATC_THR_MIX_MAN,0.5
AUTOTUNE_AGGR,0.08 (dont go below this, and prefer 0.1)
BATT_FS_CRT_ACT,1
and just to make the HNOTCH a bit more technically correct, even though it is working fine using the ESC telemetry
INS_HNTCH_FREQ,300
INS_HNTCH_BW,100
INS_HNTCH_REF,1
Cannot go through all 3 axis at the same time dont have No fly time
Only 1 axis will be completed at a time
Can i change ATC_THR_MIX_MAX 0.9 and ekf3_primary 1 For autotune
Can i tune drone in poshold ya loiter fly mode
(in no wind) ?
Because in althold drone moving all ground area
So I have to use a radio stick to hit back position loss fly time for tune
PSC_POSXY_P,0.5
PSC_VELXY_D,0.25
PSC_VELXY_I,0.5
PSC_VELXY_P,1.0 Do you set this parameter before tuning?
If you needed to change these for ordinary flight then you would have them set that way for Autotune too, but dont change them just for Autotune. Did you have a reason for those changes?
If you set any of the ATC_THR_MIX_MAX or ATC_THR_MIX_MAN to higher than 0.5 it could be that the copter wont ascend descend as it’s trying to use more throttle for stability than altitude. There are cases where you do set higher values, but I wouldnt say it’s something to just try for the fun of it while there’s other tuning to be done first.
I have almost always run Autotune from Loiter mode, and it doesnt make a lot of difference compared to starting from AltHold mode, for me. The copter still moves around a lot. If a copter is not well behaved then starting from Loiter can produce sub-standard results. It is typical to reposition a lot during Autotune.
Yes, you can set them before the next flight and before Autotune, or after. They wont affect the Autotune result. The lower values mean the copter wont try to follow a wandering/inaccurate GPS position as strictly.