Finally package recieved successfully after 35 days
China to India

trying pending yaw tune axis
tuning yaw axis 6 time full charged battery pack tune always not end
you see mavlink message
in tune log file
Start with pitch and roll axis first. Only then do yaw axis.
Roll and pitch tuned successfully done
after trying yaw tune.
Now that roll and pitch are done and saved, try yaw.
And post a .bin log file.
this Post no 22 trying yaw tune after roll and pitch done.
tune success roll and pitch
after trying yaw axis tune every time not complete
My battery is completely drain but the tune not finish
That tune looks really good for pitch and roll. Yaw is not as good.
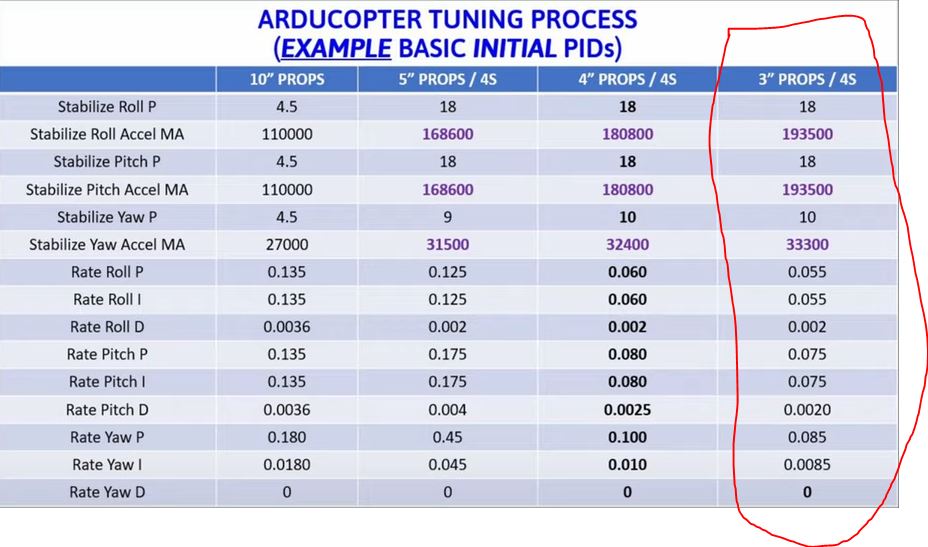
Try these for Yaw, it’s quite a bit easier to tune manually and not as critical as pitch and roll
ATC_ACCEL_Y_MAX,40000
ATC_RAT_YAW_I,0.01
ATC_RAT_YAW_P,0.1
Also set
GPS_GNSS_MODE,65
There’s nothing wrong with your GPS signal now, but this will just ensure it doesnt get overwhelmed with too many constellations.
2 Likes

Try these
ATC_ACCEL_Y_MAX,50000
ATC_RAT_YAW_I,0.02
ATC_RAT_YAW_P,0.2
or see if you can wait for a windless day and run the yaw Autotune.
1 Like
New sensor added Cheerson CX-OF Optical Flow with TF-LUNA Micro LiDAR
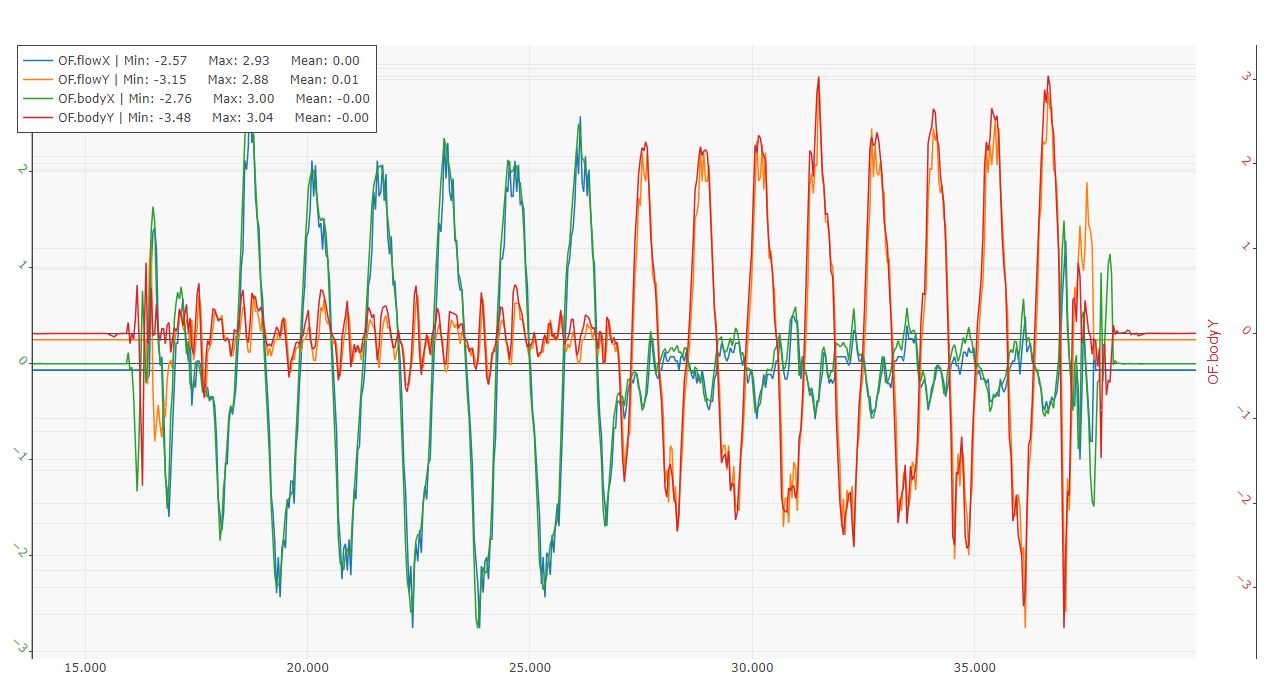
any suggestion for better performance
Tune it with a GPS first, once it is properly tuned, remove the GPS and add the OF sensor.
1 Like
after 1 year break to fly again
and today yaw tuning done
new yaw parameters

after yaw tune done fly log file
analyse my all fly mode performance after yaw tune done
@amilcarlucas @andyp1per can i go flow sensor