Frame: ImpulseRC Apex (custom version with a 211mm motor to motor distance)
Motors: Axisflying 2207 2125kv
ESC: Holybro Tekko32 65A
FC: Matek H743-Slim V3
Video System: DJI/Caddx Vista
Receiver: TBS Crossfire Nano
Props: Axisflying BB4943.5
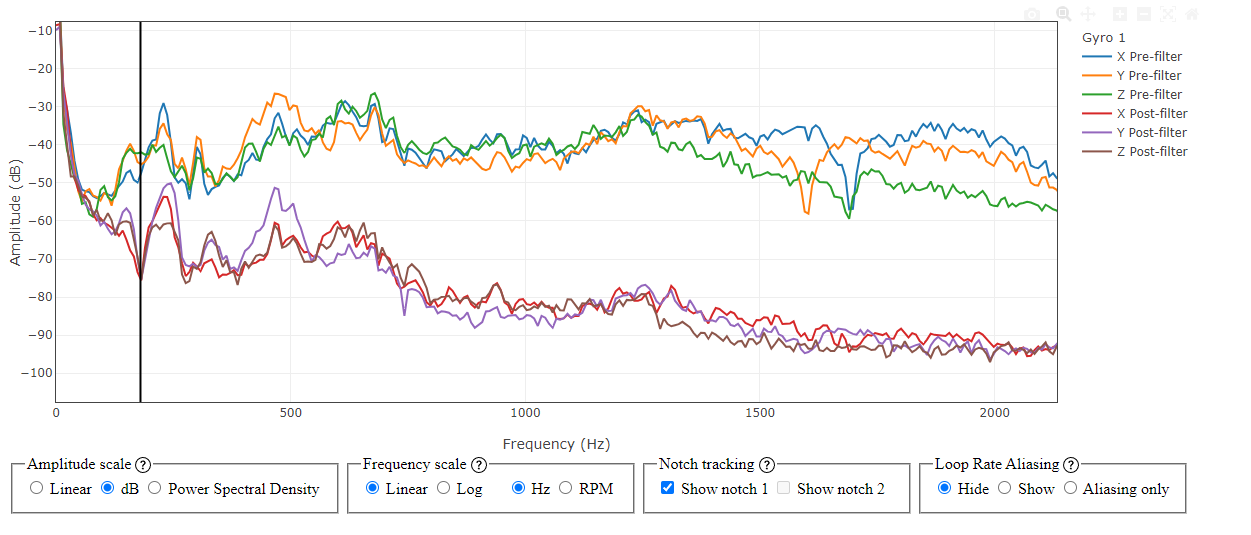
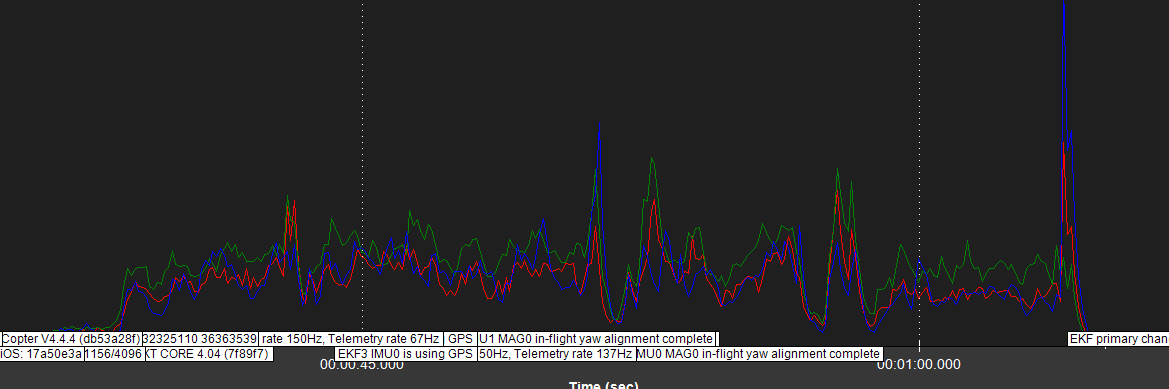
As you can see from the graphs the drone seems to be generating good data however when I fly it feels incredibly slow to react in both acro and stabilize mode. I included 2 BIN files for reference any help would be highly appreciated
In addition to my previous comment, I am adding a bit more info to explain in a bit more detail what I am experiencing while flying the drone. The main problem comes when performing high-speed maneuvers, the drone tends to lose control, especially on the pitch axis.
Here are the intermediate .param files, some files contain NA in the file name which means I didn’t modify and left on default settings because they are not necessary for my current purpose, or at least not for now. I hope this helps, looking forward to hear your feedback
Hi @amilcarlucas, apologies for the delay in my response, I did more testing with your recommendations please see my answers below.
On the 02 file: INS_TCAL1_ENABLE and INS_TCAL2_ENABLE must be 2
Re. On completion, the INS_TCALn_ENABLE parameters will change to 1 (enable ) for each calibrated IMU. I thought this was supposed to leave this parameter to 1 after the calibration is done. please confirm.
On the 05 file: you did not update the “reason changed” comment for the parameters that you changed
Re. I added details to my RC configuration
On 07 excellent job
on 10: why not limit GPS_GNSS_MODE ??
Re. Files updated limit to 3 constellations added
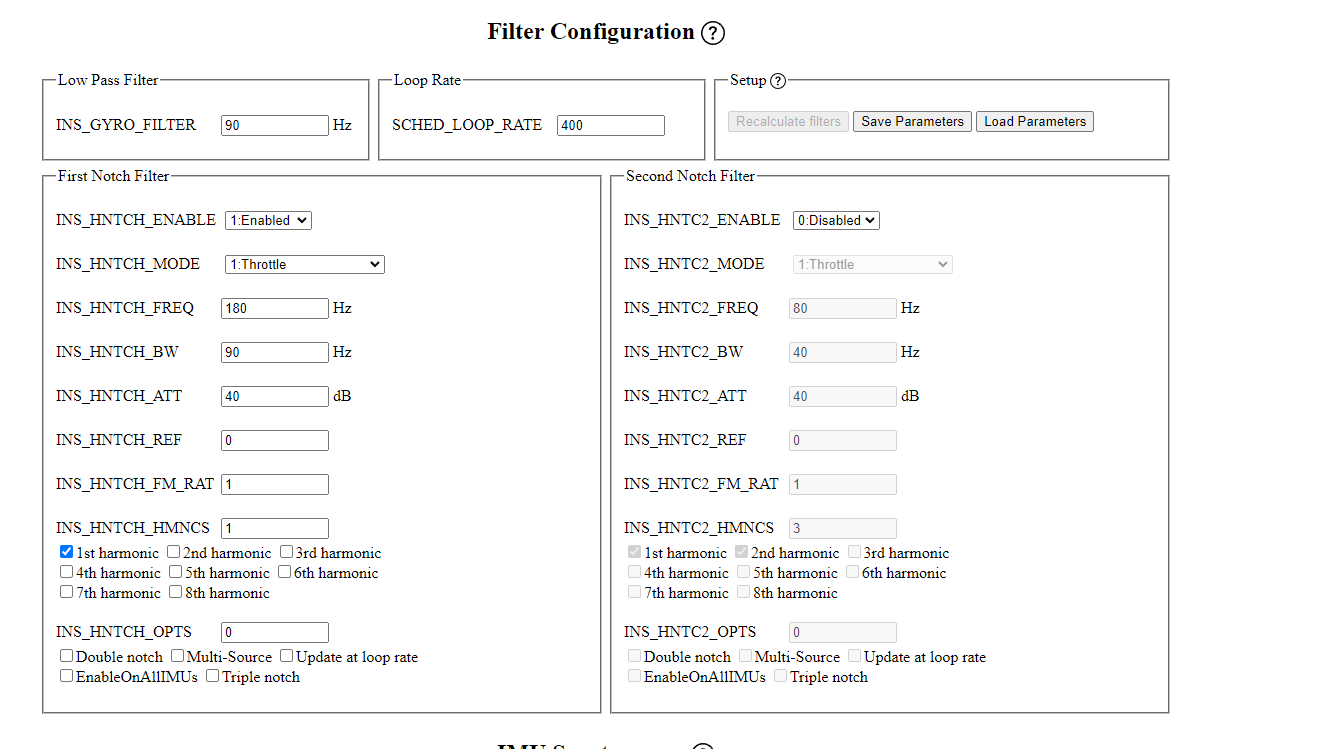
on file 16 INS_HNTCH_REF must be the MOT_THST_HOVER
Re. Files updated to the same value as MOT_THST_HOVER
0n 18 all are wrong please do follow the instructions on the comments
Re. Updated parameters according to the comments and flight tested again. My throttle hover value is 0.07 which is outside the range so I set it up to the minimum of 0.2
I added a new folder with the updated parameters and a new BIN file with a hover test, any help to get this drone flying more responsive would be highly appreciated.