Use a USB cable to MissionPlanner (or similar), telemetry radios instead of USB if you have them.
1 Like
I have telemetry, then after that what should I do? After connecting drone to mission planner using telemetry?
http://ardupilot.org/planner/index.html
In the Flight Data screen, check the Status tab and you should see messages about everything happening, or why it wont happen.
1 Like
Hi I connected drone to mission planner using telemtry, on the status screen it says disarmed. I push the safety switch then trying to armed usng my radio transmitter it just beeps. On the screen it say PreArm Compass not calibrated. But my compass has a data and it has been calibrated already, Calibrated #1 and #2 are checked, Also I leave the GPS as in connected to pixhawk but im gonna fly it in AltHold indoor. PLease help.
Experts help please. My drone is not arming anymore, how do I troubleshoot this? To know what supposed to be the problem. 
Help please, I fly my quad indoor using AltHold then switch it to AutoTune, but its drifting.
Please see this log file:
Hi @banjing
please note that NEVER EVER run auto tune indoor you have to run it in a wide aria.
unfortunately again your flight time is not enough for a good analyze.
but there is two problem in your log file
1.there is large change in mag
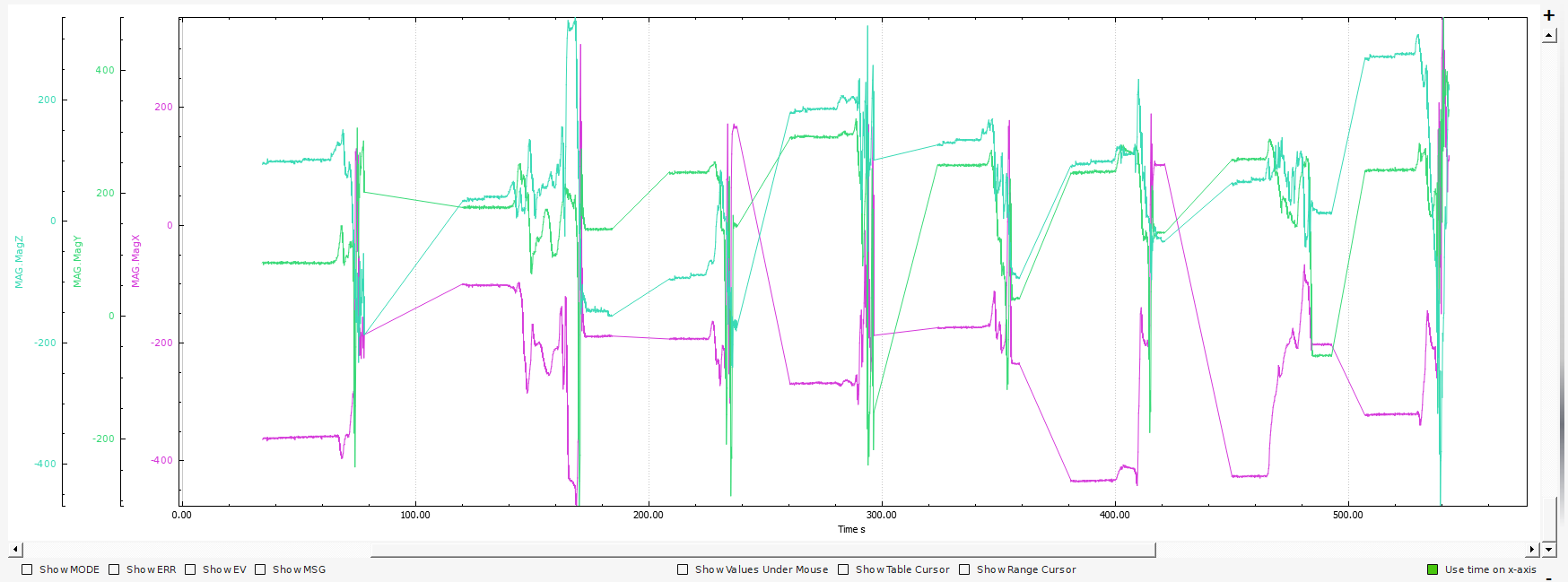
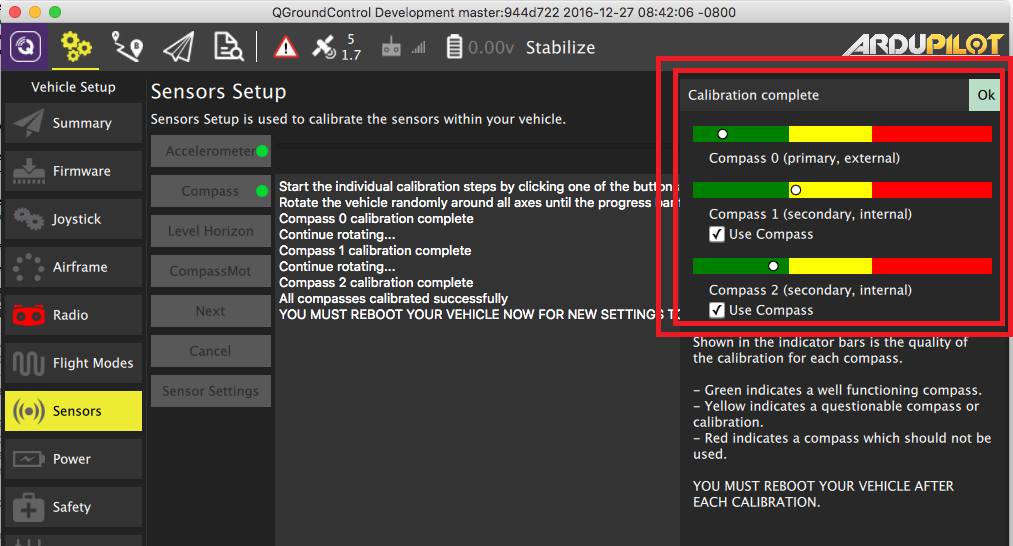
try re-calibrate your compass with QGroundControl and after calibration process its show you how much your mag is healthy
also try enable your second compass
2.still your z vibration is too high. do you use new motors?
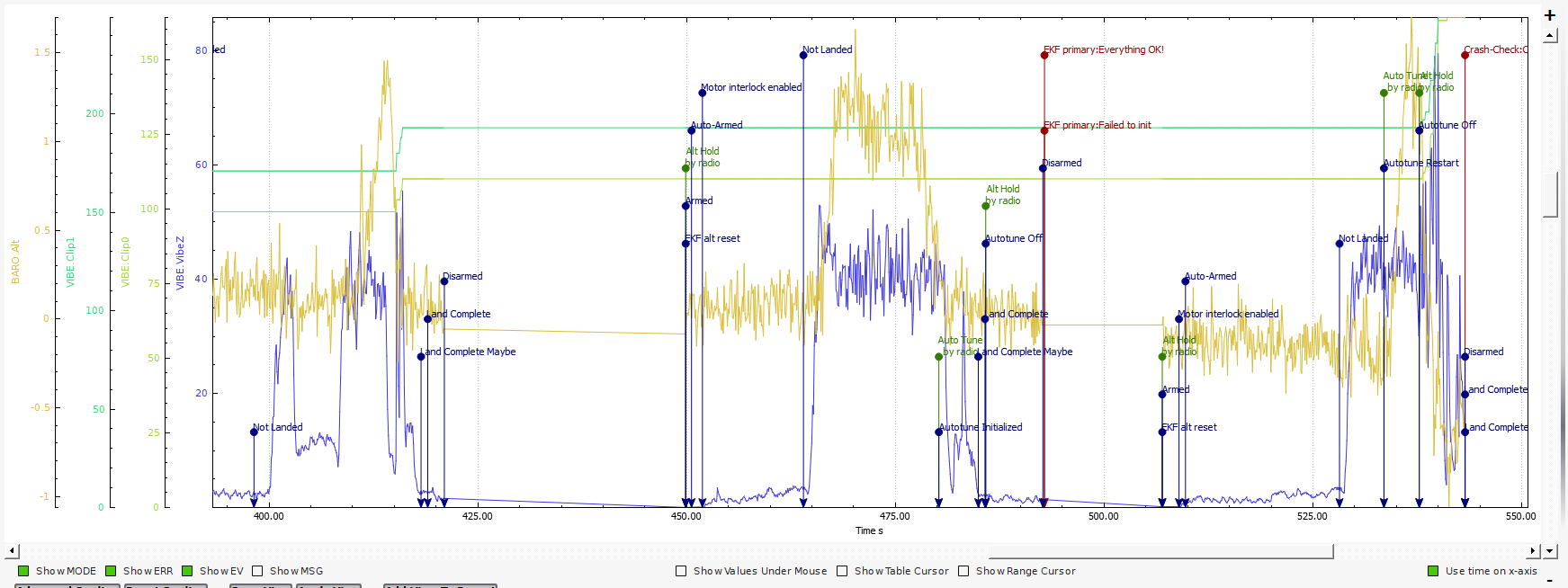
make sure wires and other objects are not inducing vibration
and in autotune process your copter will move automatically to tune itself like this video
3 Likes
Of course it’s drifting that’s what it does in AutoTune run in Altitude Hold. As I said before you will need to re-position the craft many times to keep in within your flight area. Unless you are in a very large indoor space this will not be practical. Run Autotune outdoors with GPS in Position Hold and you will not have to manually re-position during Auto tune. You will still need a fairly large area though because it will still move around a central position.
Only 1 compass is being recognized but you have compass 3 enabled with COMPASS_USE3 set to 1. Set it to zero. Then perform the compass calibration again.
Nothing can be learned about levels of vibration while doing an Auto Tune. Hover in place for a few minutes in Loiter or Position hold and post that log for this analysis.
Another comment about the compass. You are using the internal compass on the Pixhawk not the external one. That is all that is being recognized. No compass is configured to External and the Device ID says it’s a LSM303D magnetometer which is common in those Pixhawk 2.4.8.
2 Likes
Hi Sir @hosein_gh thank you for you input, no sir i didnt use yet the new motor. Im still waiting for it i ordered it last week ,im still using the old one the a2212.
But can you tell why is that upon throttling up using AltHold mode it wont fly vertically but move horizontally instead? Thanks.
could you post a video of your copter flying ?
Hi sir, yes it it true. But the sides of propellee has scratch but still balance, will it matter?
Its matter but its not the main reason
I was have this problem in althold mode and problem was physical copter balance.
My copter was heavier on right side .
If you send a video of flying it will very helpful
Thanks @hosein_gh, yes the battery is not exactly in the center. Its much heavier on the side where it automatically flown horizontally instead of vertically,. Or is the built in compass on the pixhawk not precise? Thanks.
Hi @hosein_gh, heres the link of my flying drone using althold and hover at the throttle center then moving stick up and down, but it is reverse. This is before not recent, I didnt try yet auto tune for this one.
")
This is the video tried last day, using althold mode and as i was saying it flown horizontally, in this situation the battery is located below the f450 base. didnt get the chance to flip to Auto Tune bacuase its drifting

2 Likes
i think drifting of your copter in second video is normal because you are in Althold mode not loiter or poshold mode if you look this video you can see that your copter is like other users in Althold mode
if you want your copter not drifting in the air try loiter or poshold mode but you can use these modes only in outdoor because they want GPS lock
1 Like
How about in the first video? It is in Althold mode also.
Can I used Loiter to take off then switch to Auto Tune after? Then once complete switch to Loiter for landing?
about your throttle :
also you can reverse CH3 in parameter list just search for RC3_REVERSED and change it
1 Like
you can take off with loiter and also autotune your copter in loiter mode
But i dont have chanel 7, I will just use Auto tune as flight mode, after take off I will switch to Auto tune mode. Then once complete, switch again to Loiter for Landing. Will it Hover on Loiter mode?
I will try on doing the things you all suggest, for now my propeller was damage i cannot test it. But already taking notes of all the suggestions.
Maybe by monday we will try flying in loiter mode to perform Auto Tunem but loiter needs GPS right? Which is better, GPS external or Indoor?
Once all the problem has been fix, next step is to perform mission flying/