Hi Sir @hosein_gh, i read the document. Im confused on what to do next after I edit the AUTOTUNE_AXES=1 or 2? After that whats next? How do i tune it? So sorry for my question sir if this sounds stupid  Im confused, because I will connect the pixhawk to mission planner set the AUTOTUNE_AXES = 1 or 2 or 3 for tuning, then after that whats next? Where to tune? Thanks much
Im confused, because I will connect the pixhawk to mission planner set the AUTOTUNE_AXES = 1 or 2 or 3 for tuning, then after that whats next? Where to tune? Thanks much
Step 1 (roll tuning):
- fully charge your battery
- In mission Planner go to full parameter list and set AUTOTUNE_AXES=1 then click write button
- Take off with loiter or althold mode and change flight mode to autotune , wait till autotune complete
- When autotune completed , land and disarm motors
Step 2 (pitch tuning):
- fully charge your battery
- In mission Planner go to full parameter list and set AUTOTUNE_AXES=2 then click write button
- Take off with loiter or althold mode and change flight mode to autotune , wait till autotune complete
- When autotune completed , land and disarm motors
Step 3 (yaw tuning):
- fully charge your battery
- In mission Planner go to full parameter list and set AUTOTUNE_AXES=4 then click write button
- Take off with loiter or althold mode and change flight mode to autotune , wait till autotune complete
- When autotune completed , land and disarm motors
Note that you should run autotune in a wide aria and a claim day
3 Likes
Hi Sir @hosein_gh thank you so much for yout details response, how would I know once autotune completed? Will the autotune help to stop drifting of my quad? I will land using AltHold or Loiter flight mode?
Once i changed it to AutoTune, what will I do in my part? Do I need to do somethingon the controller or just let it hover while performing autotune? Thanks
Read through the docs:
http://ardupilot.org/copter/docs/autotune.html
You need a very large area free of trees and buildings, the copter will move around a lot.
The copter should stop twitching and moving around once it’s finished, just land and disarm, new PIDs will be saved. It will be obvious that it’s finished once you see how much activity there is during Autotune.
If you copter is “drifting around” in PosHold or Loiter mode then it’s not really anything to do with the autotuned PIDs. Check the Loiter and Althold tuning pages. Number one issue is vibrations.
2 Likes
hi @banjing
please read my first post autotune is the last step
note that althold mode doesn’t provide position holding but your copter must not drift to much in wide and clam area.
for a good performance in althold mode and other mods like loiter, poshold and … first balance your copter , check propeller balance , motors shaft and then run auto tune.
i think your copter is not physically balanced and also as @xfacta said : Number one issue is vibrations.
3 Likes
Hi Sir @hosein_gh thanks, what do you mean by vibration? The pixhawk has a vibration holder. Im confused 
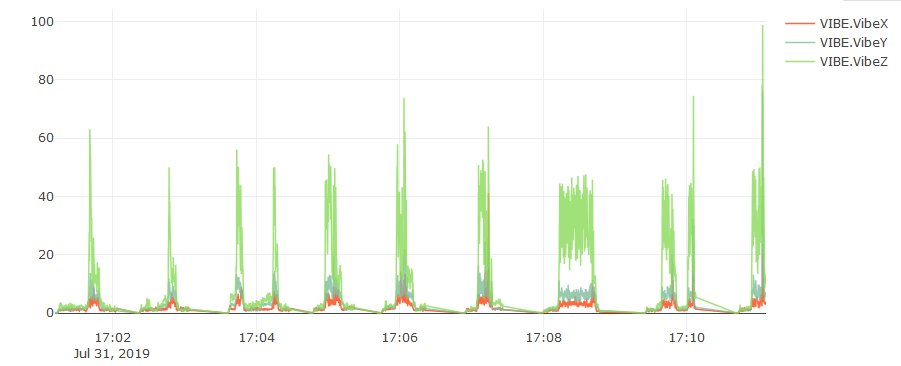
In the log file you supplied earlier there are vibrations mainly in X and Y axis (horizontal) and they’re cyclic which is a bit strange - maybe out of ballance props are setting up some sort of resonance.
Some of the vibrations are exceeding limits of the IMU and are “clipping” - this is not good.
Read up on vibrations, mostly balance props and make sure wiring and parts are not loose. Also it’s important that the wires arent transfering vibrations from the frame to the flight controller, but they cant be too loose either.
EDIT: looks like you’re giving small bursts of throttle, not a good log file for figuring out much. Best to get some real flying, but definitely fix those vibrations first.
4 Likes
Can you send please a picture of your drone, then it is easer to support you in reducing vibes.
2 Likes
Hello @xfacta thanks for your inputs. You’re saying that possibly my propellers are not balance?
P.S I didn’t yet start the auto tune process suggest bu @hosein_gh. After I preform autotune, I will send flight logs again here.
Yes, something is causing lots of vibrations and it’s usually props
2 Likes
Hi
So those are my observations from your pictures.
- Those damaged props can not be balanced. You need to replace them and balance them or, what I would not suggest, repair the edges and balance afterwards
- the arms are flexible and will cause vibrations
- Those motors you are using are not of good quality and are known for vibe issues
- you should move your GPS in Z-Achse on a stand (approx. 10cm)
3 Likes
Hi @Harald, thanks for your inputs. Yes the sides of propellers has crashes, but already done propeller balancing, it is still balance and can be use, is it okay? Also, for the motors. What kind of motor can you suggest? Also, the GPS has a stand but im struggling connecting it thats why i put it besides the pixhawk.
On the log file i sent, i uses GPS stand but it became looses thats why i removed it from the stand.
Hi @banjing
As @Harald said a2212 motor are not good for quadcopter and they mostly used in plane
As my experience a2212 generates high vibration with 10x45 prob im using t-motor 2213 with t9545a propellers and they are okey in my hexacopter
About broken propellers you can balance them but they generate diffrent thrust at each side
1 Like
Will this motor A2212 wont solve vibrations? Sad to hear, is their any remedies? I will be starting auto tune tomorrow.
you fight time is not enough for a good analyze but in the log file when you fly more than 1 meter there is a high z vibration and clip in your log
high z vibration could make altitude holding and position estimate problem
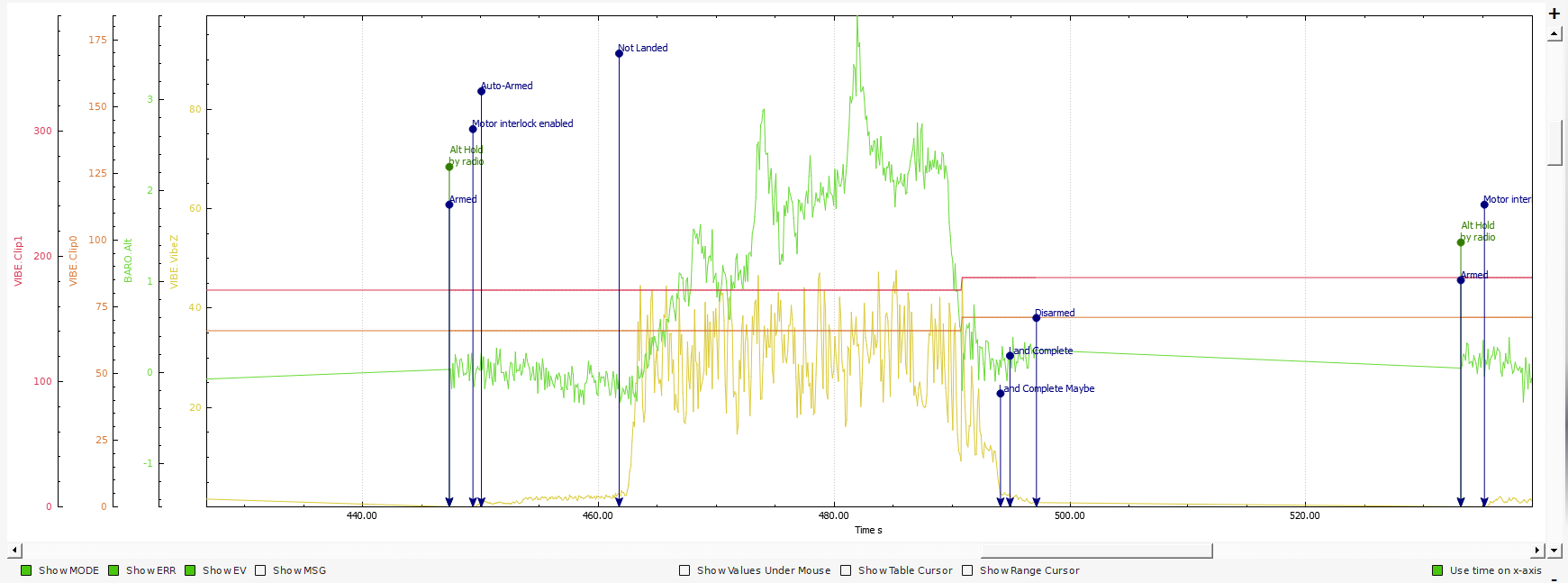
according to documents the Clip0, Clip1 and Clip2 values which increase each time one of the accelerometers reaches its maximum limit (16G).
running auto tune will not help you to solve this type of vibration
3 Likes
So, what do you suggest? Any recommendation if I still used my current brushless motor? Thanks.
Also, because ordering of new brushless motor takes 3 weeks to arrive, that’s why ill stick to the first. But any remedies?
Suggestion of brushless motor and propeller. Thanks.
You will struggle with the components of that build as Shawn has suggested. The motors and ESC’s you have are very poor quality and at best those F-450 frames, even with the higher rigidity arms, are prone to vibration problems. Replace the motors with 2212-920kv mulltirotor motors and replace the props. If you have the soft plastic arms (the cheapest variety) high vibration may continue to be a problem but it will be flyable.
3 Likes
Hello, what type of motor should i buy? And what size of propeller? My propeller is carbon fiber and quiet balance, i tried plastic propeller it didnt fly and always drift upon take off.
