Hello,
I’ve been trying to set up a Stingray 500 with a Hex Cube (Pixhawk 2) running ArduCopter V3.6.9.
I am able to arm the heliquad with no problems, but the motor connected to the ESC will not spool up. I am unsure whether I have my parameters set wrong, the ESC is not calibrated correctly, or my transmitter is not set correctly.

The servo output for 8 does not respond to throttle. It stays put.
Here are the results of my transmitter calibration:
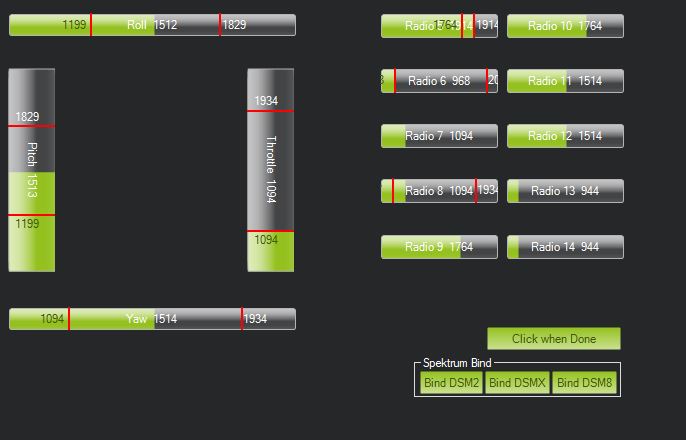
Channel 8 has CH8_OPT set to 32 (motor interlock) as recommended in https://ardupilot.org/copter/docs/heliquads.html. I use a Futaba T14SG, and I mapped both channels 3 and 8 in the transmitter to the throttle stick (J3).
I calibrated the ESC by plugging it directly to channel 8 in the Futaba receiver. Should I have calibrated it through the PixHawk?
I also attach my parameter list in case I set something up incorrectly:
5-26-20 Stingray.param (14.1 KB)
Any help resolving this issue would be greatly appreciated as I am a beginner when it comes to drone set up and would really like to get the collective pitch quad setup working.