I used pixhawk x7 pro and Neo v2 gps
I was reviewed log, events occurred EV: land_complete and EV: motor_interlock_disabled in same time approx 14:45:41.71
In this time, fc recognized that the alt is more than 15m.
After crash, I checked battery current, remaining battery was more than 50%, so i don’t think that cause isn’t battery
Why my helicopter fallen down. And what could i do for prevent recurrence?
@cube_purple I am sorry to hear of your crash. This was due to a poorly tuned roll axis. When the desired attitude and actual attitude are more than 30 deg apart, the crash detection logic thinks the aircraft crashed and disarms the aircraft.
First I would suggest that the crash detection be disabled. You can do that by setting FS_CRASH_CHECK to zero. Helicopters generally don’t need this enabled. It was mainly put in the code to prevent multicopters from doing more damage after the crash. With helicopters, initial impact pretty much destroys most of the rotating components. So disarming after the crash to protect the aircraft from damaging itself more is not a concern.
Next Please visit the Traditional Helicopter tuning wiki. Please follow the tuning guide to better tune your heli. if you have any questions, please ask on this forum. Does your heli have a tailrotor? I noticed that you have ATC_HOVR_ROL_TRM set to zero? If you have a tailrotror on this heli, then this should be set to the roll angle that keeps the heli from drifting when you hover in calm winds.
I had followed the tuning guide in the Traditional Helicopter tuning wiki.
At another time, ATT.Des ROLL and ATT.ROLL were so good, except Auto mode and 14:45:38. (Flight speed is more than 22m/s in auto mode)
So I don’t think because of tuning. And I can not tuning ATC_HOVR_ROL_TRM because average wind speed is 5m/s.
Finally I can not understanding that why did fc order rolling over than 20 degrees suddenly.
Well not tuning ATC_HOVR_ROL_TRM properly was not the cause but just something I noticed when looking at your Params.
I think the main reason for the occasional large offset in desired roll vs actual is due to the I term. The way you have it tuned in pitch and roll relies mainly on the I term to remove attitude error. In pitch the IMAX and ILMI are high enough that the I term can always remove the offset between desired and actual. In roll, IMAX and ILMI are small and any disturbance can cause the offset to grow.
Size of helicopter’s main rotor is 2m.
I found ATC_RAT_RLL_ILMI is 0.05
In wiki , they suggested that set ATC_RAT_RLL_IMAX to 0.4
So I will change value of ‘ATC_RAT_RLL_IMAX’ 0.2 to 0.4
As far as I can tell, ILMI is recommended that this value is no larger than 0.1 In roll axis
Is it Right?
Yes that is the recommendation. because in the roll axis for traditional helicopters (main rotor with tailrotor), too much integrator build up and it can cause the helicopter to roll over on the ground.
A good tune relies on enough FF term to get the actual rate to match the desired rate. As I said in my previous post, the way your aircraft is tuned, the I term is doing most of the work. Therefore you see large disparities in attitude when the I term is limited. this will happen will decreasing speed below 5 m/s in crosswinds. the plot below shows this behavior.
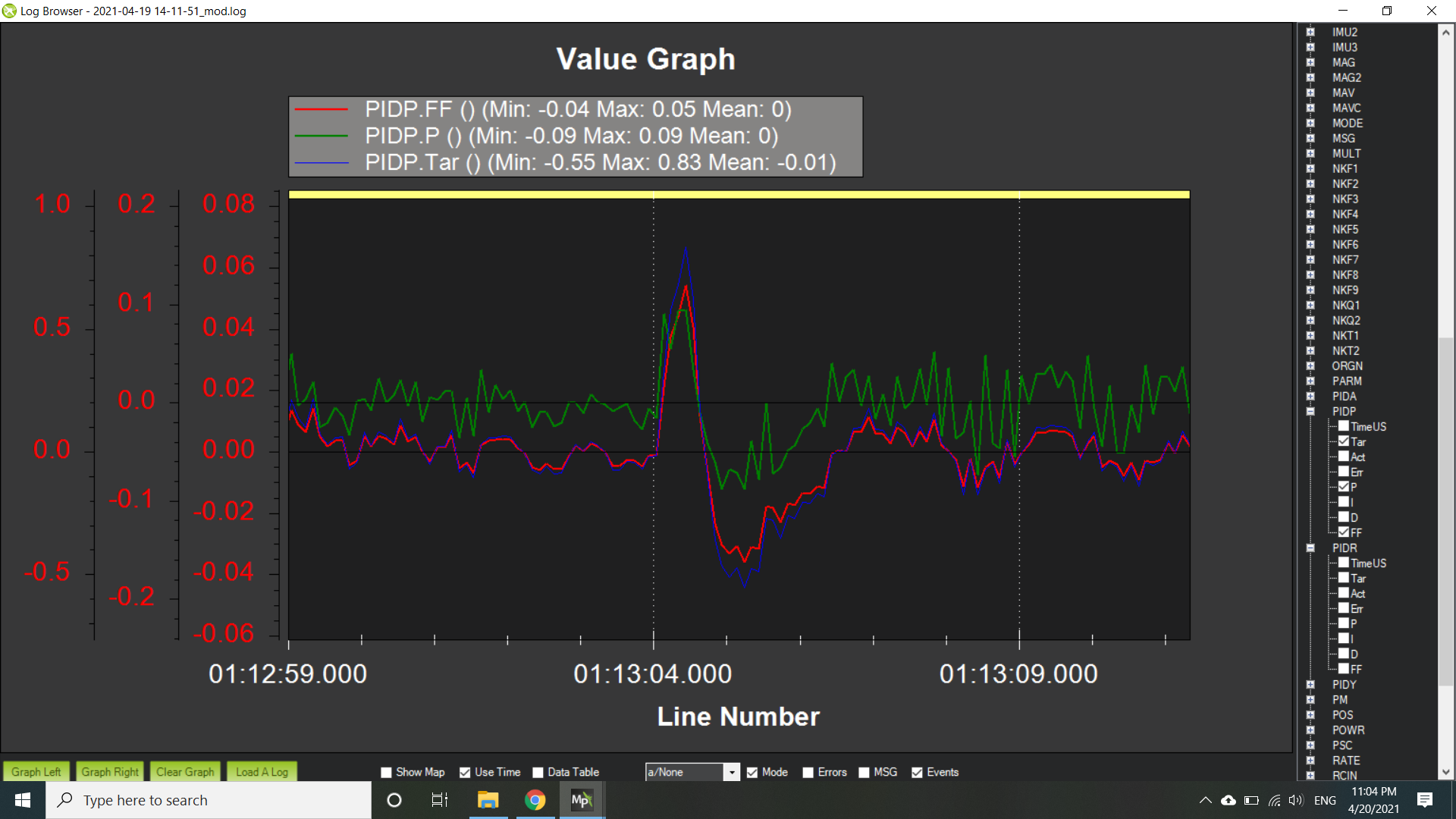
So the plot below is a plot of desired rate, P term and FF term. You can see how the P and FF terms consistently follow the desired rate through out the increase and decrease in rate. This indicates that there is not enough FF Gain. You will need to increase the FF gain until the P term reverses half way during the increase in rate. That is a good way to determine when you have enough FF gain.
This part is hard to understand. What is mean ‘You will need to increase the FF gain until the P term reverses half way during the increase in rate.’ ?
Is this mean that Increase FF gain until the P term reach half of PIDX.Tar?