I have been flying this heli almost a year with this exact same firmware and parmaters with no problems. at the start of my trade heli journey i have to tune it quite differently but i got the result i want in the end i tried RTL worked almost perfect i tried gps hold , circle mode, loiter mode all have worked perfectly in the past but today unfortunately it decided not to go well and decided to ram itself on to the ground and into the wall I don’t know what had hone wrong all the servos were fine and were digital metal gear servos linkages were fine too dont know why it happened ,pls any dev pay attention to this thread and the firmware i was using was 4.1.5 i installed the firmware which was the latest at the time and it is a 450 flybar heli .
Will be uploading logs soon as possible
Here is the log file
@Suar_Bhai i am sorry to hear of your crash. I will try to look at it this weekend. Just remember this could be a GPS or flight controller issue where it lost position info. But I will know more once I looked at the log.
Yes please very much appreciated i will rebuilding this heli again and before that i really want to know what caused that crash
Any help will be appreciated ![]()
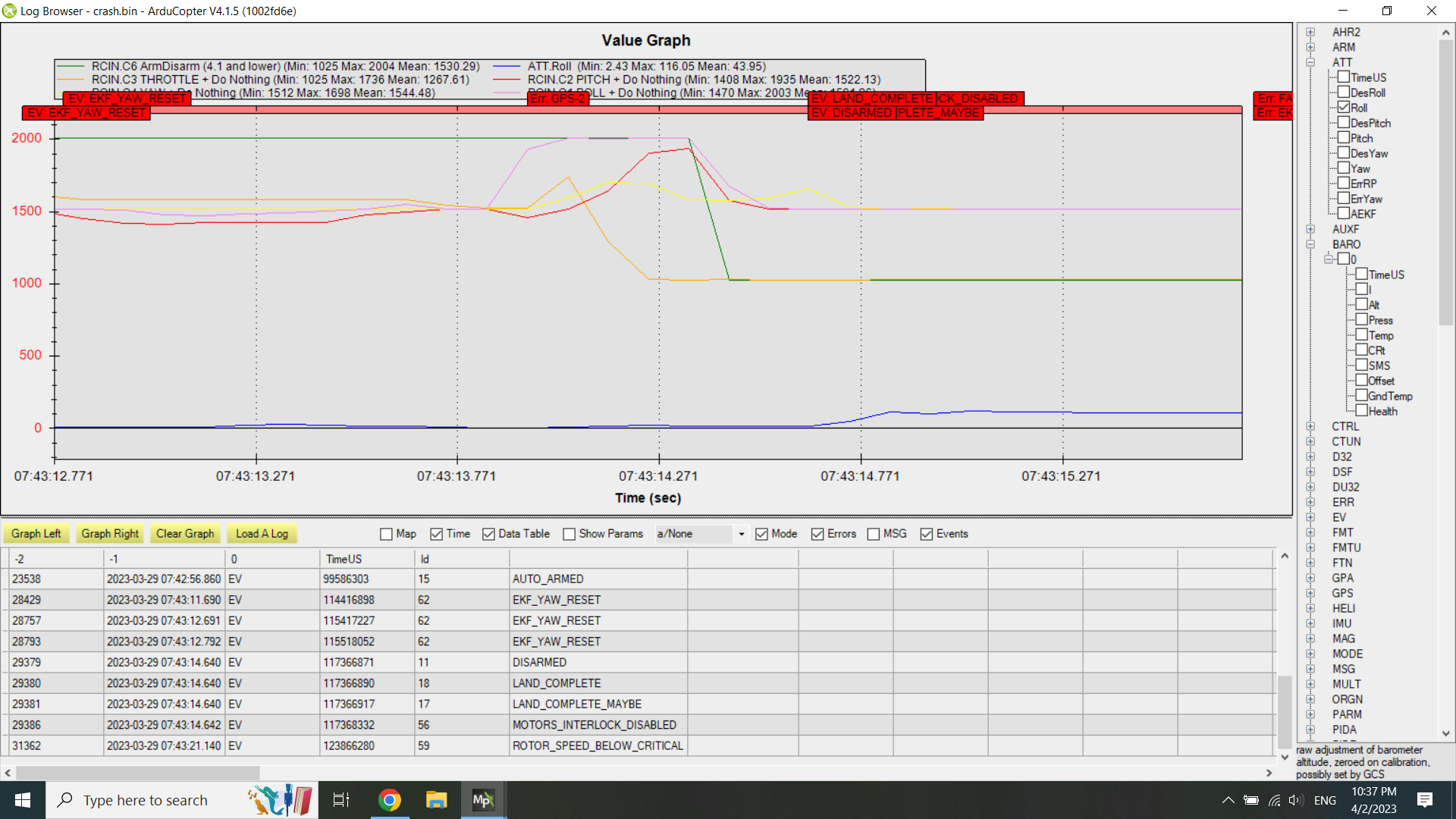
@Suar_Bhai It appears that the aircraft was disarmed by the RC switch while it was flying. Your setup has RC channel 6 assigned to arm/disarm. In the plot below, it shows that channel 6 is switch to the position (1000PWM) that caused the aircraft to disarm in flight.
Oh i remember i disarmed it quickly when i saw it about to crash and hit the ground but it was hovering above the ground when i saw it tilted to its left side and then i disarmed it while it was going left into the ground so yeah i m pretty sure i haven’t disarmed it while hovering i 200% make sure when flying that i do not press arm switch cause it close to flight modes button
Perhaps you should make the arm/disarm switch as far away as possible from the modes switch. I use top left for modes and top right for arm/disarm.
@Suar_Bhai it seems that in your last flight on that log both position and velocity innovations went increasing till they exceeded the FS_EKF_THRESH. At that point the copter had already tilted on roll and the switching to DCM occurred.
You can see the big “jump” on the map as well, before you actually cut the throttle.
Just to understand better, how close were you flying to that building? did you takeoff from the roof and maybe tried to descend along the side walls?
The link to your log expired, can you provide a new link.
Yes i was on roof just hovering above the sidewalls luckily it didn’t go too left off the roof could have been worst
Uploading logs again wait
I was hovering above the roof then it decided to tilt left i didn’t have kuch spaces to work with so this is how i fly sometimes so i tried not to go over the roof
Wjy did it happen any explanation pls and what is dcm
So I will let @Ferrosan see what he comes up with regarding the unexpected movements in loiter. My two concerns are that you are flying in an area that could be potentially dangerous to others and that you had not thought to just switch into stabilize or althold when you saw the aircraft doing something you didn’t command. You should always be ready to take control in stabilize if you see the aircraft doing something unexpected.
I was already in stablize mode when it happened i know because i tried loiter mode 2-3 times but it was going to the right very fast so i decided lets not fly in loiter and just decided to hover in stablize and then this happened
@Suar_Bhai my apologies. You were in stabilize. Ok. Well then it is possible that your attitude solution got compromised. I don’t have the expertise to diagnose that from the logs but I have seen it before.
Pls anyone tell how this happened i want to avoid this in future at any cost pls someone explain in detail what actually happened
@Suar_Bhai thanks for uploading the log again.
here:
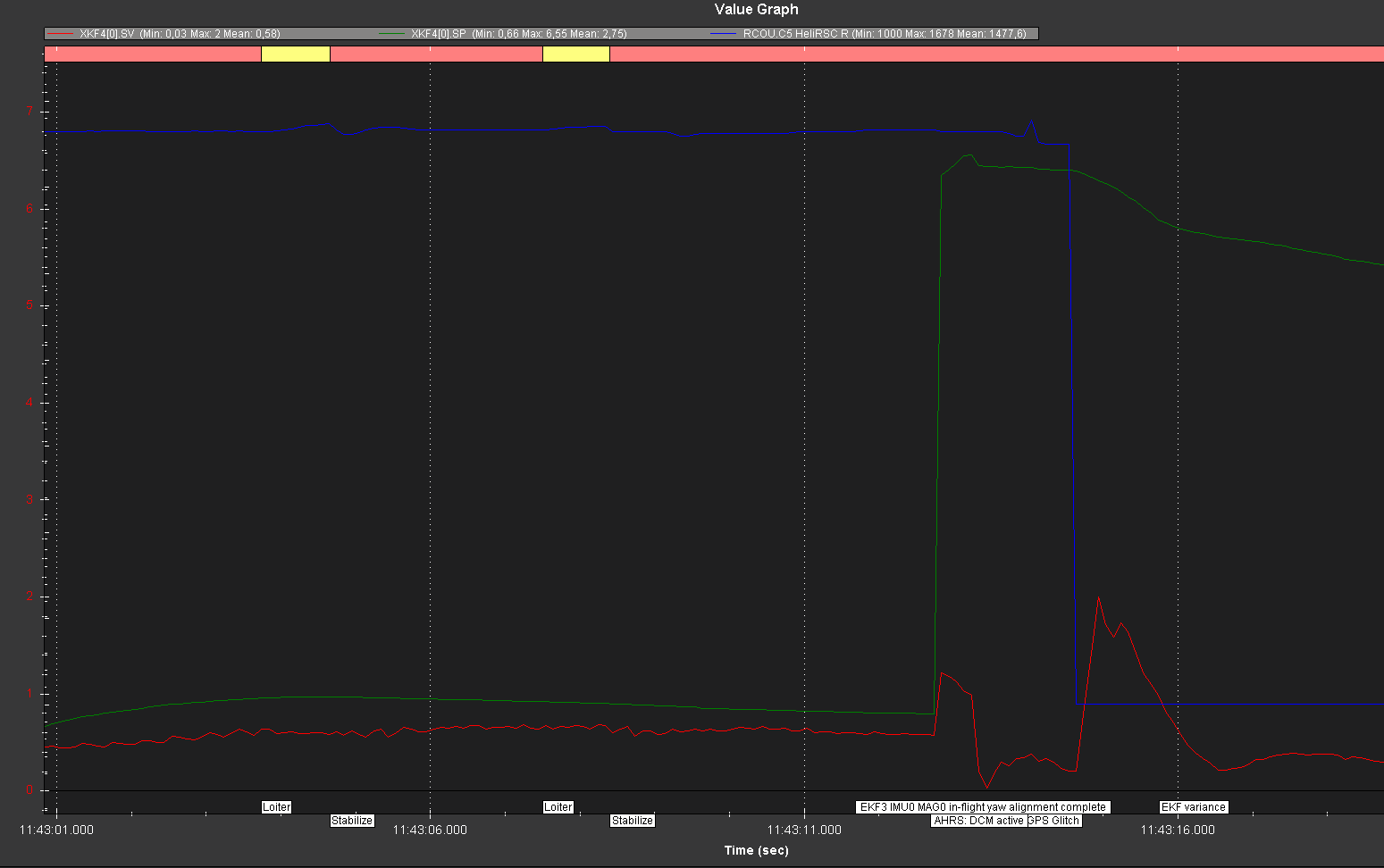
I can see you have been trying to engage loiter a couple times, but I see also that velocity and position innovations were very high (compatible with you reporting the heli was drifting away). The problem is, when this happens, attitude estimation gets compromised, with the heli performing attitude changes not commanded by the pilot.
Average “good” values for SV and SP, according to my experience are below 0.15/0.10, in your case these values were costantly above 0.5, till it reached the 0.8 threshold limit.
I asked if you were flying close to walls because I have seen this happening only in “jammed” environment or in multipathing (which happens when the GNSS receiver is close to vertical walls like buildings etc…).
You can see here what a “jump” you experienced seconds before crashing:

To my knowledge there is no “cure” to this, only do not fly in such conditions. On the other hand this is totally recoverable:
as Bill correctly pointed out, pilot needs to be ready to take over with manual control. This can be done
in Stabilize flight mode (it can be a little bit difficult, you probably will have to reach full travel on cyclic control to bring it back down safely- attitude solution is being switched from EKF to DCM so it might not be perfectly level for a while and you will have to counteract it with cyclic) or you can switch to Acro flight mode where you will have only rate stabilization and not attitude stabilization (again, better be familiar with manual flying).
Acro flight mode would be the safest option in my opinion, as you just would have to “manually” level the aircraft out, without having to continuosly “fight” a compromised attitude solution.