https://drive.google.com/drive/folders/1fU8c0xhQaO-HrNlX1zlJmY2anlqdy8uq?usp=sharing
Hello guys,
I need your help to properly set up my helicopter.
It is an Allign 600 Electric.
It can be flyable but not very well. Some fluctuations and a strange response. I tried to understand something with the wiki but I have difficulty to understand what must happen by changing some parameters.
I leave you a link with the logs of the last day (with some canges in P I D).
Thank you for your help!!!
Hi @Avro93, You need to set your ATC_RAT_RLL_VFF and ATC_RAT_PIT_VFF to 0.15 and ATC_RAT_RLL_I and ATC_RAT_PIT_I to 0.1. Also set ATC_RAT_RLL_ILMI and ATC_RAT_PIT_ILMI to 0.08. From there you can start to tune according to the tuning wiki. The low VFF values and High I values were probably making the aircraft feel different.
Thank you for your answer! I’ll try with this settings.
Explain to me what these parameters are for? (VFF and ILMI)
The tune has to be done with Stabilized or Acro mode?
Thanks again!
Ok, with this settings the helicopter looks good. But I have a serious problem with Velocity in EKF. During the hover flight in stab mode, the helicopter has done a rapid and very dangerous roll to the right and has moved rappidly for 6 meters without response, the led start to flashing blue and yellow (EKF Velocity error). I had 9 sat “connected”. This Velocity error is happend more than ones in past… What can I do to solve it? Is this problem related to (old) hardware or to crashes done in past? Thank you!
Log: https://drive.google.com/drive/folders/1wdXrhqynYapI9oLh3_SZb5TLSGuVC2C-?usp=sharing
Marco,
The VFF gain is a feed forward gain for the axis rate commands. In stabilize mode, the attitude requests are turned into angular rate requests. The requested rate is multiplied by the VFF gain and sent to the servo. So it acts like an RC receiver in that it provides straight command to servo. The actual aircraft angular rate is not factored into the command going to the servo. So to tune the VFF gain you want to ensure the rate commanded matches the actual rate fairly well. You would use the RATE message in the log file to do this.
The ILMI is a parameter that will help the aircraft retain the trim attitude in a hover. It limits the integrator from leaking under the ILMI value because of the leaky I scheme we use while the aircraft velocity is less than 5m/s. With ILMI set to zero, integrator is constantly leaked off and never allowed to build and thus doesn’t help the controller hold trim attitudes (you will see difference between the desired and actual attitude). Have ILMI non zero let’s the integrator build. We set it to lower values to keep the controller from having too much authority and causing a roll over on the ground.
I haven’t looked at your log but check and make sure your IMU vibrations are not excessive.
Ok, thanks for the clear explanation. I think that the vibrations are not the real problem. I have checked the vibe graphs during flight and after but none red indictions have appeared. Cheching the logs, vibrations are under 100 (90 as max). Moreover you can read in logs that the sistem trys to talk with gps 2, but I have only a single gps installed and the param for the second is 0…
In the Drive Link you can find the logs to check the vibrations.
I attach the FFT graphs
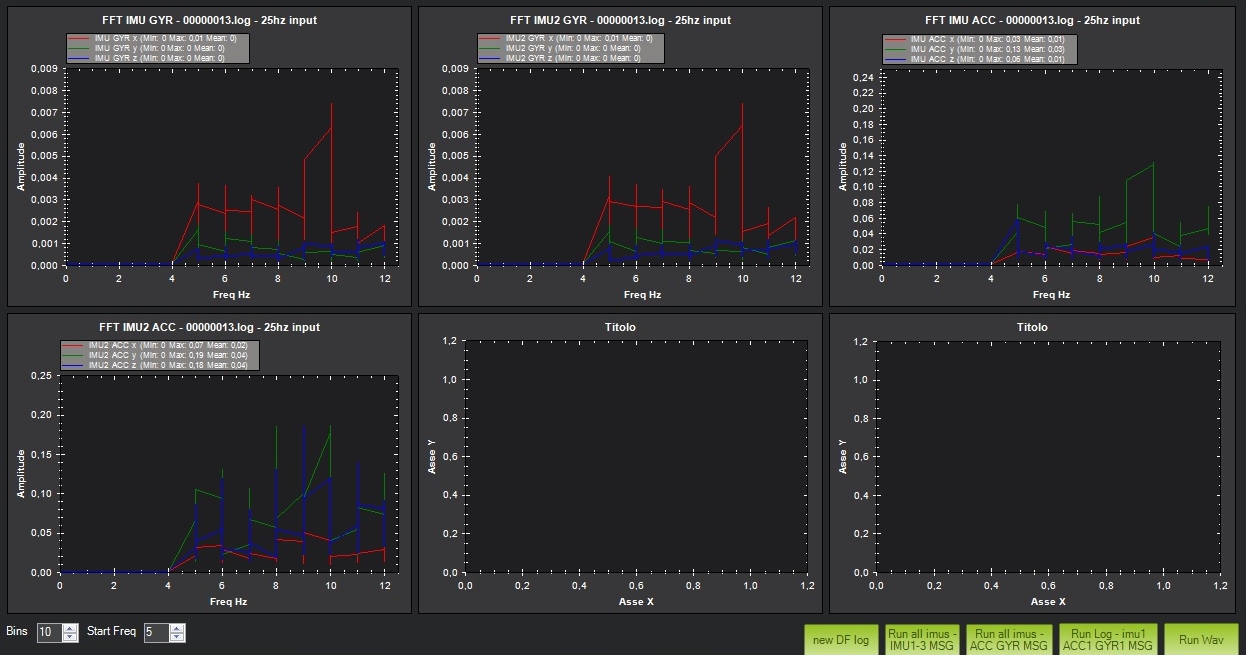
Thanks again.
Marco,
You have a very large disparity between the accelerations of IMU1 and IMU2. I think this is causing the EKF to be unhappy. Here is a graph of the X and Y accels for IMU1 and IMU2. You can see that the IMU2 accels are much larger and there is some sort of large bias in the Y accels for IMU2.
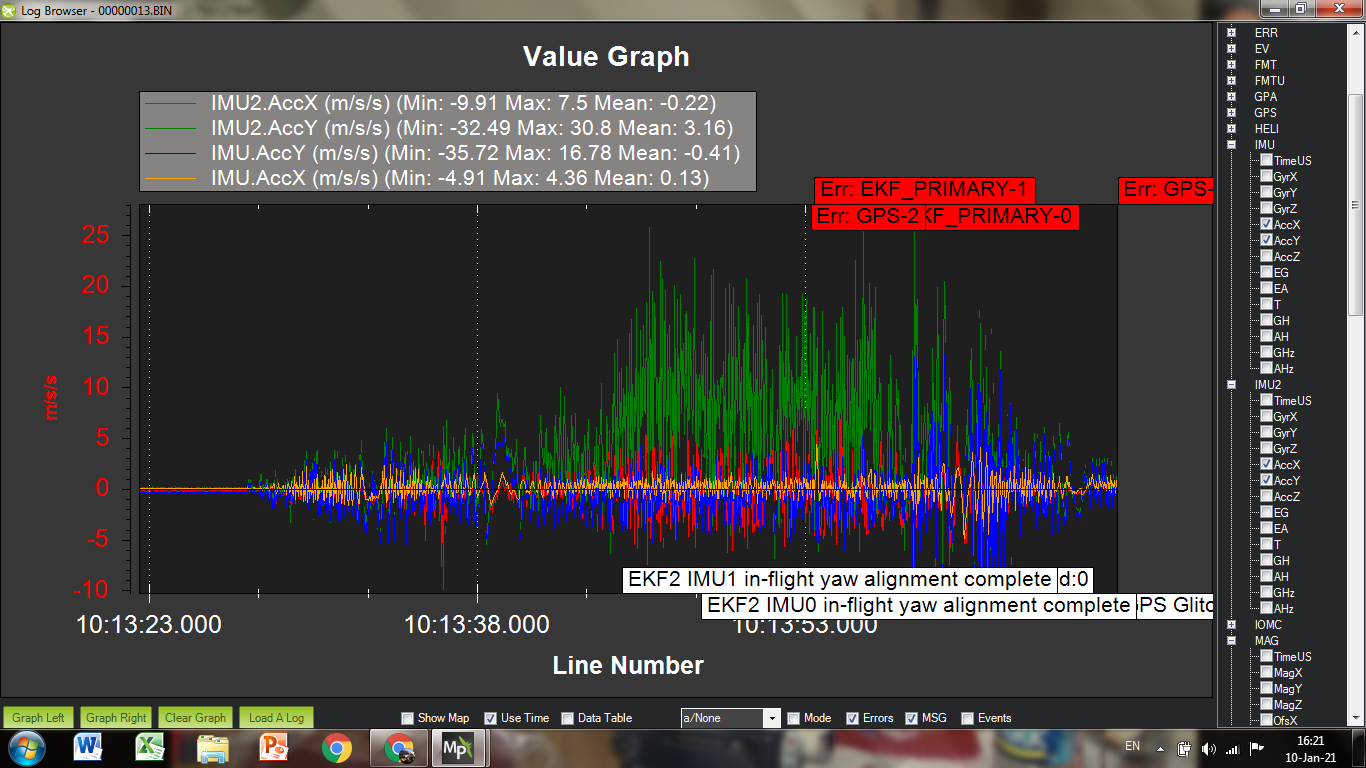
You could push the EKF to only use one instance of the EKF with only IMU1. So to do that you would change EK2_IMU_MASK to 1 which tells it to only have one EKF thread using IMU1. This could be considered a little more risky as it doesn’t have anything checking it. Also I would recommend only using your external Compass (inside the GPS puck) as the internal compass inside the controller is typically too close to the motor and can get interference. The other thing to indicate that problems with accelerometers is the Clip signals in the VIBE message. CLIP2 had a significant number of clips during the flight. This should be zero the whole flight.
Ok.
In your opinion, this disparity between IMU1 and 2 means that the board start to be inoperative? I’m really scared, in every flight. I don’t want to crash because i know costs and damages that this helicopter can create. If this board is broke, maybe it is better to leave the project…I don’t want to se again that it goes straight and without control in a direction (maybe the wrong one)… 
What is the Gps 2 error?? I don’t have a gps 2 installed and the parameter is set to 0… 
Thank you again!
Your GPS question is not right. Read carefully what Bill wrote to you!! It is about compasses.
What type of autopilot do you use ?
Could you attach some pictures of your installations ?
Yes, I understood… but in logs appears a red tags “gps 2 error” that in my opinion are incorrect indications.
Anyway I tried the settings suggestid from Bill. The helicopter is more stable but the ekf failure (velocity and Position) are still present.
I’m using the phixhawk 3dr Px4 , with a Taoglass LEA6 V1.2 3dr gps+compass.
I’ll send you the new logs and pictures soon.
Thanks for the help.
Hello @bnsgeyer,
hello Bill,
I am new here in the community and I am from Germany. And I have a rusty English. And I am new with flight controllers. I only know the FBL systems like Bavarian Demons …
I became aware of this forum through Holger Schutz (a German author for a German model helicopter magazine). Maybe you know Holger.
I followed this thread, because I have started configering a Pixhawk 4 Mini (with GPS and telemetry) on a TREX 600 EP. Because of our bad weather here in Germany I could not make a test flight untill now.
For the configuration, I followed the adrupilot.org pages for the traditional helicopters. And I adopted the suggested parameters from the “Advanced Tuning for trad. helicopters” (https://ardupilot.org/copter/docs/traditional-helicopter-tuning.html#initial-setup-of-pitch-and-roll-tuning-parameters)
But, some of this parameters differ from the paramteres you suggested for the setup of Avro93.
Would this changes be good at all or only for Avro93s setup?
It would be very nice if there were a list of important parameters for different sizes of helicopters with which one could safely start without making a serious mistake. Then you can fine-tune.
Are there such lists? Maybe I’m too demanding as a newbie to the forum. Please excuse.
BR
Heri
@heri Welcome and thanks for posting. Yes I have worked with Holger a lot over the past year or so. The changes I suggest for Avro93 would be good for all users which are listed below
ATC_RAT_RLL_I and ATC_RAT_PIT_I to 0.1
ATC_RAT_RLL_ILMI and ATC_RAT_PIT_ILMI to 0.08
These will improve the flight characteristics of the aircraft. You do need to tune ATC_RAT_RLL_VFF and ATC_RAT_PIT_VFF according to the wiki to further improve the flight characteristics.
Let me know how it goes.
Regards,
Bill
@bnsgeyer Hello Bill,
thank you for your fast reply.
I will change the parameters as you suggested. And I will let you know about the results.
Do Holger have an account in this community? In two of his articles in the modell helicopter magazine he named your name and that he got a lot of help from you.
Although I’m in the German Scale Helicopter Community myself, I haven’t spoken to Holger personally yet.
BR
Heri
Here he is. Problem Mission Planner App mobile phone
@FRED_GOEDDERT Hello Fred, thank you. Yes I found him just some reading posts later  . Seeing your name, could it be, that you are German too?
. Seeing your name, could it be, that you are German too?
BR
Heri
I am a New Zealand citizen. Yes German background. ( 70plus old)
Hello Bill,
for my new report in the German ROTOR newspaper I have rebuilt one of my helicopters, with the values from the wiki. However, I took your new values (for Avro93).
It flies well and is suitable for beginners.
However, these 4 values are set to “0” in the wiki.
What is better, what should I write?
Will this be changed in the wiki?
What happens if I change VFF?
I am in contact with HERI.
Many greetings Holger
Translated with www.DeepL.com/Translator (free version)
I would recommend using the values I provided to Avro93 which are listed below
ATC_RAT_RLL_I and ATC_RAT_PIT_I to 0.1
ATC_RAT_RLL_ILMI and ATC_RAT_PIT_ILMI to 0.08
Yes it is important to tune this parameter. I hope to have heli autotune out for initial testing soon. This first version of autotune will tune VFF and ANG_P which should help a lot of users.
1 Like