hi, thank you!
Autotune for Heli will be great…
Holger
hi, thank you!
Autotune for Heli will be great…
Holger
Hello,
Last Sunday was a 2 hour break from the storm and rain. Whereby the wind was still at 2 to 3 wind strengths and very cold. So far too much to do a tuning flight. But it was good enough for a first hop.
I had taken the values from the tuning pages and the improvements made by Bill.
I only set the value for ATC_RAT_YAW_VFF to 0.035, as I fly my TREX600 with relatively low rotor head speed. I am a Sclae Heli pilot, so I am used to fly with low rotor head speed.
So I started to the first hop: As the heli got lighter I noticed that the tail rotor wanted to turn the helicopter and the helicopter wanted to tilt to the right.
I took my heart and soul and increased the pitch to the hover angle pretty quickly. The helicopter jumped into the air and then stood floating quite calmly. Judging by the weather conditions.
At the beginning I noticed a slight shaking, which I could primarily observe on the landing gear skids. I think the tail rotor swung back and forth at a high frequency. Over time this got better but wasn’t entirely gone. It may be that I changed the value for ATC_RAT_YAW_VFF too much. I have now set this to 0.024. And now, I wait for the next flight. So the weather cooperates.
I also tried at evaluating the log files for the first time.
Here I wanted to look at the VIBE parameters.
Here is a question right away: Which level do the X, Y and Z axes mean in the traditional helicopter? Probably a stupid question, some experts will ask.
BR
Heri
Holger,
I found the ROTOR magazine online. I looked up the article you wrote on your experience with ardupilot last May. I ordered a copy. I look forward to reading it. Good thing I have google translate 

I also saw on the cover a scale model of a U.S. Naval Test Pilot School TH-6B. What a coincidence.
Regards,
Bill
hi Bill,
very good!
meanwhile I have a fligthcontroller in 5 Helis: 3 x tandem, 1 x scale, 1 x 500er.
All are flying good.
When do You think You have the first Heli-autotune for testing?
regards,
Holger
I hope to have it ready by the end of this weekend, if the weather allows me to do some testing. This would be higher risk testing as I will have only tested it in SITL and on my heli. I have attempted to make it so that you can always switch out of autotune and return the settings back to the original settings. I have put my autotune changes in the stable release (4.0.6) to minimize some risk of testing with Master. I will post on this forum that I am ready for initial testing and provide firmware to those that are willing to test it.
@bnsgeyer
Hi Bill, thank you for your work you are doing for us all!
Autotune would be realy fine to have.
I myself, i am not good enough yet for testing.
BR
Heri
hi Bill,
great -I would try it
Holger
Yesterday the weather was good and I tried an other test with my TREX600/Pixhawk.
I reduced the ATC_RAT_YAW_VFF to 0.024.
The first testflight was good, but I think the tail still swings a little bit. So I changed ATC_ANG_YAW_P to 4.3 . In this test I just hovered around a little bit.
Second flight. Everything went right. I tried AltHold: Ok, no big jump when switching.
I tried Loiter: Ok. I switched between Loiter, AltHold and Stabilize for a few times.
Everything normal.
I tried a bigger circles, about 50 meteres, all in Loiter Mode.
Suddenly the helicopter jerked around, as if one were giving roll and pitch commands briefly but strongly. The whole thing took maybe a second or two. Then everything was normal again. As far as I could tell. Since yesterday I have been busy with the data flash log file for hours. As a beginner in this area, I have a hard time with it.
I think I am having problems with the compass. Could you take a look at the log file. The event was between 14:14 and 14:15 (hh/mm)
Here is the Logfile:
https://1drv.ms/u/s!AjSq727ChpJzaTEANaAQG7SZl3U?e=YSRqMi
And here the Parameters:
https://1drv.ms/u/s!AjSq727ChpJzai5haUrUh3ameb8?e=KDz3Q2
Would be very kind if somebody could help me.
When I installed the Pixhawk, I took the installation location of the previous FBL system. But that sits directly in front of the engine and above the engine governor. Probably not optimal.
Before I start converting everything, I would like your opinion as to whether the compass is the cause of the malfunction?
BR
Heri
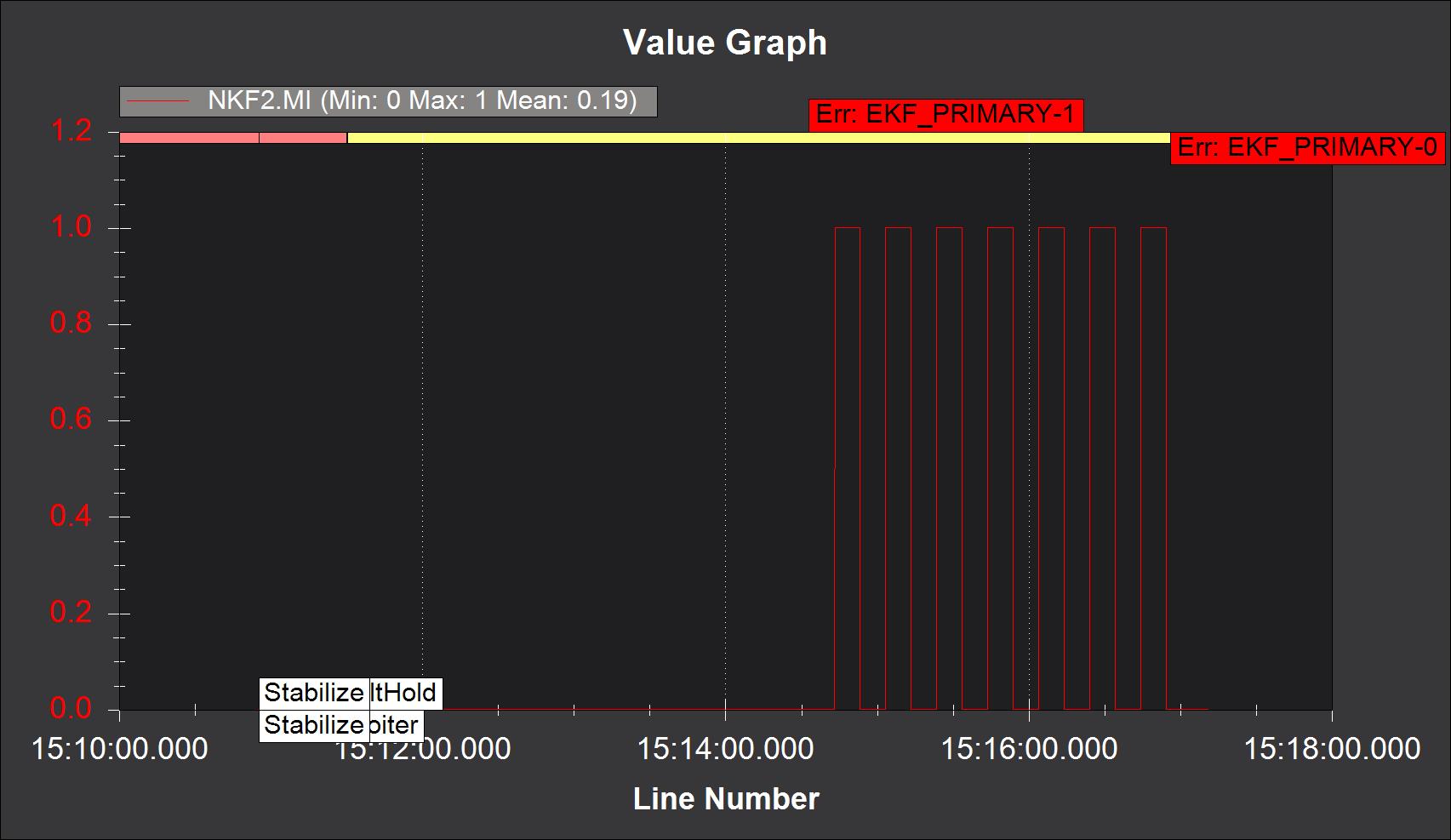
Looks like you had “EKF Yaw reset” that initiated all …
compass used had started to flip between 1 and 2
@ZvikaF
Thank you for your help.
Yes, I saw the Event Message “EKF yaw reset” in the Datalogs too.
Three times, one shortly after the other. And shortly after this you can see an error code “EKF Primary-1”. It all appears around the time where the strange behavior was.
I looked at the NKF4 entries in the log file viewer. I think I can see bad behavior here, but I lack the experience to interpret it correctly.
I looked at my compass values again in the setup. The internal compass is entered here as the first compass. I will recalibrate the compass and put the external compass in the first place.
Nevertheless, I would be grateful for further investigations of the log files by experts.
BR
Heri
One more question to you: Where did you see, that the compass used had started to flip between 1 and 2? Which graph did you use for to see this item?
BR
Heri
@ZvikaF
Isnt it good to have the community Thank you. Now I can see it.
I recalibrated the two compasses and set the external to be the first.
I made a screen shot of the calibration:
https://1drv.ms/u/s!AjSq727ChpJza_t8wMAeEMaZ-zA?e=yfCb7V
Then I made a “flight test” at the ground (without the blades) and looked at the EKF-Panel during “flying”. The compass value did only grow a little bit, nearly nothing.
What do you think about the results of the calibration? I am in Germany.
BR
Heri
Hello @heri
Indeed, It is good to have place to gather information and knowledge.
Took me some time to learn, and i do learn everyday new things
Compass calibration looks good, and the change to use the external compass as primary is excellent.
You need to be alert and be prepared for the unknown, as problems always lurks in the corner.
Hope you have good flights, keep us posted.
Thank you for your help. Thanks to all!
@heri in many cases, heli users will only use the external compass and set the use_compass param to 0 (don’t use) for the internal compass. Especially when the flight controller is so close to the engine or other metal components.
@bnsgeyer
Bill, I will view the logs during my “testflight” on the ground. If I do not see the same behavier as In the “bad” flight, I will try a real flight and check the log. If the problem is still there, I will disable the internal compass.
Fingers crossed.
BR
Heri
https://drive.google.com/file/d/10zBbgJcXWEkG2C7erjDnmFsUOKdlzrAi/view?usp=sharing, https://drive.google.com/file/d/12jSsqZQ9NPXwVAxhVTBwT04_t-1kuDLv/view?usp=sharing, https://drive.google.com/file/d/1m5Yh_5z4yAdAzwEcne6cOxlmI-B-fHBG/view?usp=sharing
Hi @bnsgeyer, I have a similar problem with @Avro93. Heli hovers all right, but it fluctuates a lot as it goes forward. I would appreciate it if you can take your time and have a look at my logs. thanksUploading: 5 1980-1-1 8-00-00.bin…