Trad Heli users, I was doing some testing in the sim with AC 3.6.0 and noticed the aircraft drastically rolling to the right shortly after takeoff. It was pretty evident watching the aircraft in realflight that it was not lifting off with a right wing down to arrest drift due to the tailrotor thrust. I was wondering if there is anyone using 3.6.0 that has done autonomous missions from takeoff and had noticed this behavior. It was pretty evident becuase the aircraft suddenly and drastically rolls right at about 2 ft off the ground to stop the drift.
@FRED_GOEDDERT I know you seem to routinely conduct mission with auto takeoff. Have you seen this?
Bill, I do not auto takeoff for the last 3 years now because I never liked it. But I do always RTL with auto land.
At my last mission which was very good after the first 2 way points on. I observed the following with my drone and the Helicopter.
I takeoff in stabilize always, switch to Alt-hold and than switch to Auto.
In Auto both aircraft twitching around if they were looking what direction they have to take and than skip way point 1 and 2.Than going straight to way point 3 I believe. Because that was not part of my video area I didn’t bother and have not mentioned here. I thought it maybe was myself during the creation of the mission.
Mention this now is because Rand issued a warning regarding spline way point 1.
I cannot help you with auto takeoff feedback.
Bill, in the Release of the final 3.6.0 Randy made the following Warning, if you missed it.
Warning3: we have discovered an issue with AUTO mode’s spline waypoints in which the first spline waypoint may be skipped. Fix planned for 3.6.1 which will start beta testing in about 1 week
Maybe that problem also influenced the auto takeoff???
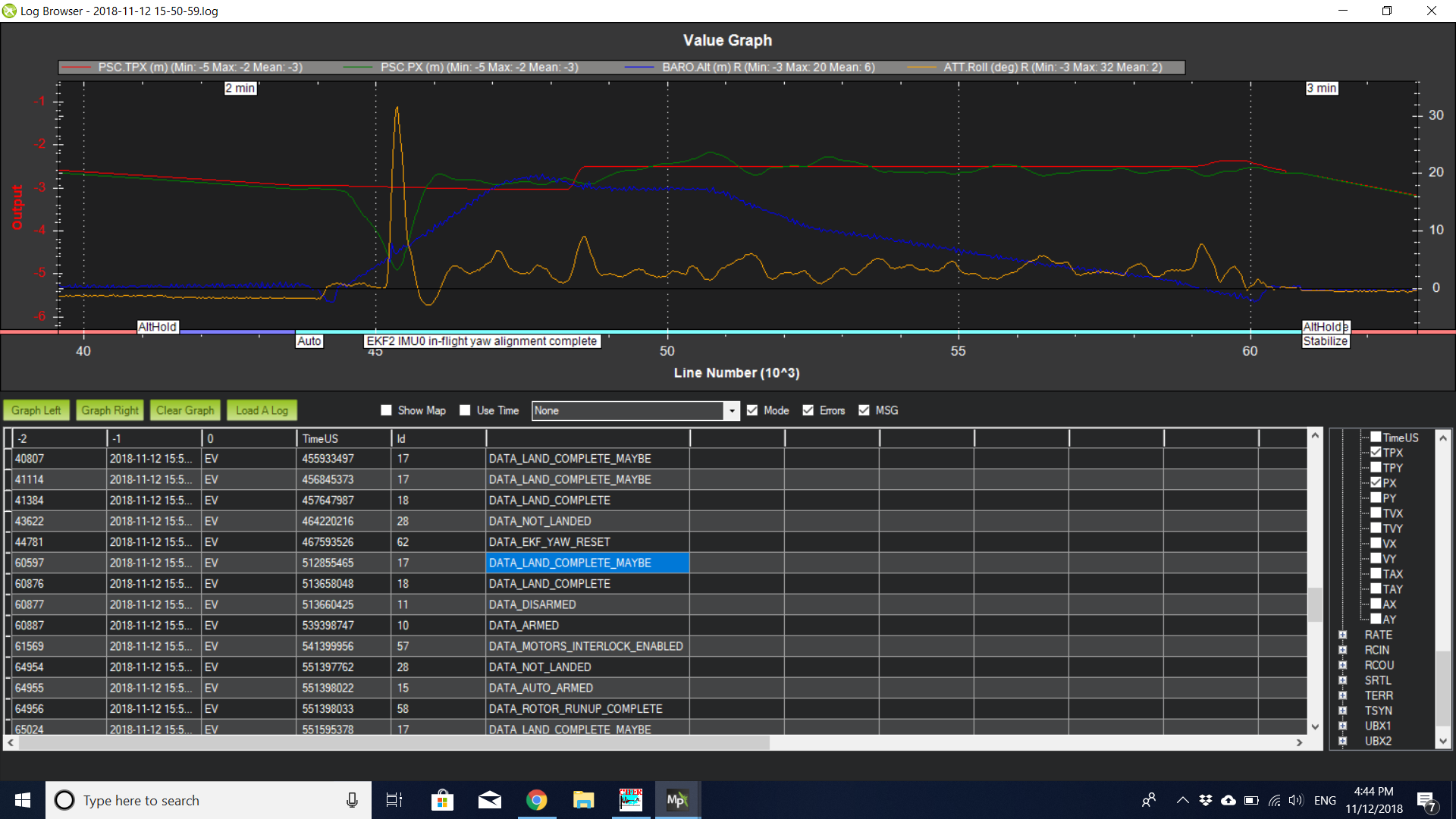
Well I was able to test this today with AC 3.6.1 on my Synergy 626 with a Pixhack v5. I performed a takeoff followed by an RTL. Here is a screenshot of the short flight. There is definitely something stopping the position controller from holding position for the first 5 meters after takeoff. I will post this as a bug on github.
You can see the aircraft moving with the desired position staying constant. At an altitude of 5 meters the aircraft makes a 30 deg right roll and aggressively picks up the commanded position.
Does this have something to do with the minimum navigation altitude? I believe the param is something like WP_NAVALT_MIN, which may be set to 5 meters.
Yes, I was just looking at that. I believe you are correct. However for heli’s the aircraft drifts because they delay rolling to the trim roll angle. So when the aircraft does start navigating it makes very abrupt corrections.
I guess I had thought it only delayed it on the ground, and at liftoff it applies the hover roll trim? It may be different in auto, but I thought it applies it immediately on liftoff in Stabilize at least.
In stabilize and I think all but auto modes, hover roll trim is applied once the aircraft declares not landed. Definitely in auto, it doesn’t apply hover roll trim until the min nav altitude which I think is wrong.
I had to look quickly to see what I’m using (I don’t use auto takeoff except for testing anyway). I have mine set to 2. I think it can be set to zero, but that might cause problems with GPS error on the ground.
@Rob_Lefebvre Do you recall any reason for delaying the hover roll trim from being added to the roll attitude for auto takeoffs? I just want to know if you had input on this and there was a reason for it.
@Leonardthall and @rmackay9 Do you have any idea why the hover roll trim is not applied right away like is normally done in other flight modes?
Rob,
I spoke with Tridge regarding this and he deliberately changed this in preparation for the outback challenge a few years ago. It was mainly because heli’s could tip themselves over in auto mode prior to taking off due to the gps drifting. In addition, if the I-term was not tuned properly, the aircraft would overshoot the roll trim angle and potentially contact the rotor with the ground. So he made this change to not invoke the hover roll trim and delay navigation until the aircraft reached an altitude specified by the user. In my case, this parameter got set to 5 meters which I don’t know how it got that way. Tridge says the default for that parameter is zero. He recommended it be set to 50 cm.
So I am ok with delaying navigation until a specific height. that I understand completely due to the accuracy of the GPS sensors we use. I disagree with the hover roll trim not being applied as it is with every other mode other than acro. If the user is performing takeoffs in loiter or stabilize with no issues then takeoffs in auto should not be an issue either. just my thoughts.