I too didn’t get it where did it went wrong .I will share after fixing it
I found the issue and fixed it. You can use windows 11 now.
1 Like
I checked in windows 10 it is working now I will check in windows 11
it is working now but i stuck at vehicle directory like no intermediate parameter files found even i coonected the fc .i created the vehicle template what need to add in that data means .Can i copy the paramater fiile and paste it or any other thing .Can i get reference if you have
The reference is the user manual
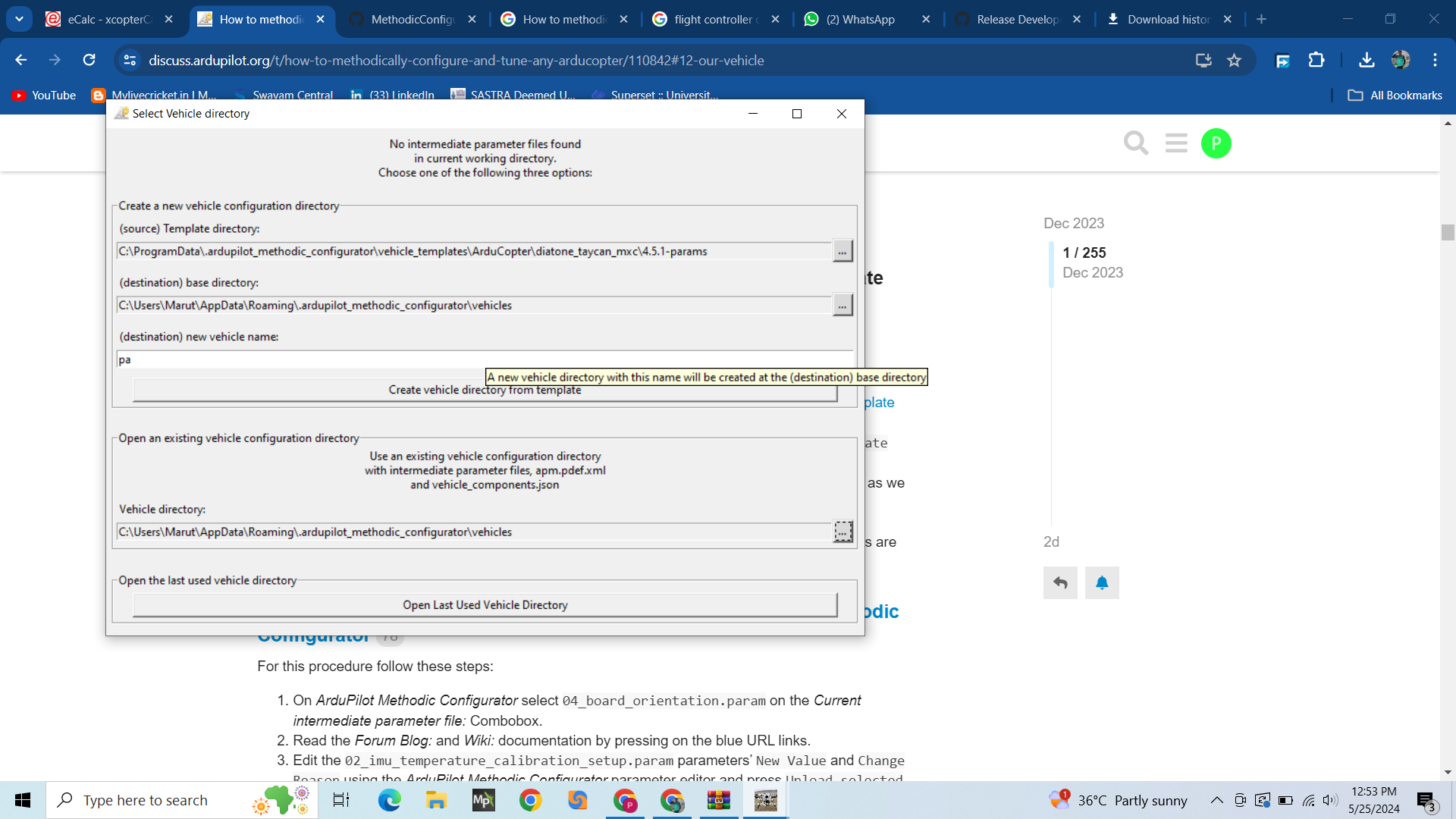
Just press the button “Create vehicle directory from template” no need to copy paste anything!
It is created but from them it is not going furthur.
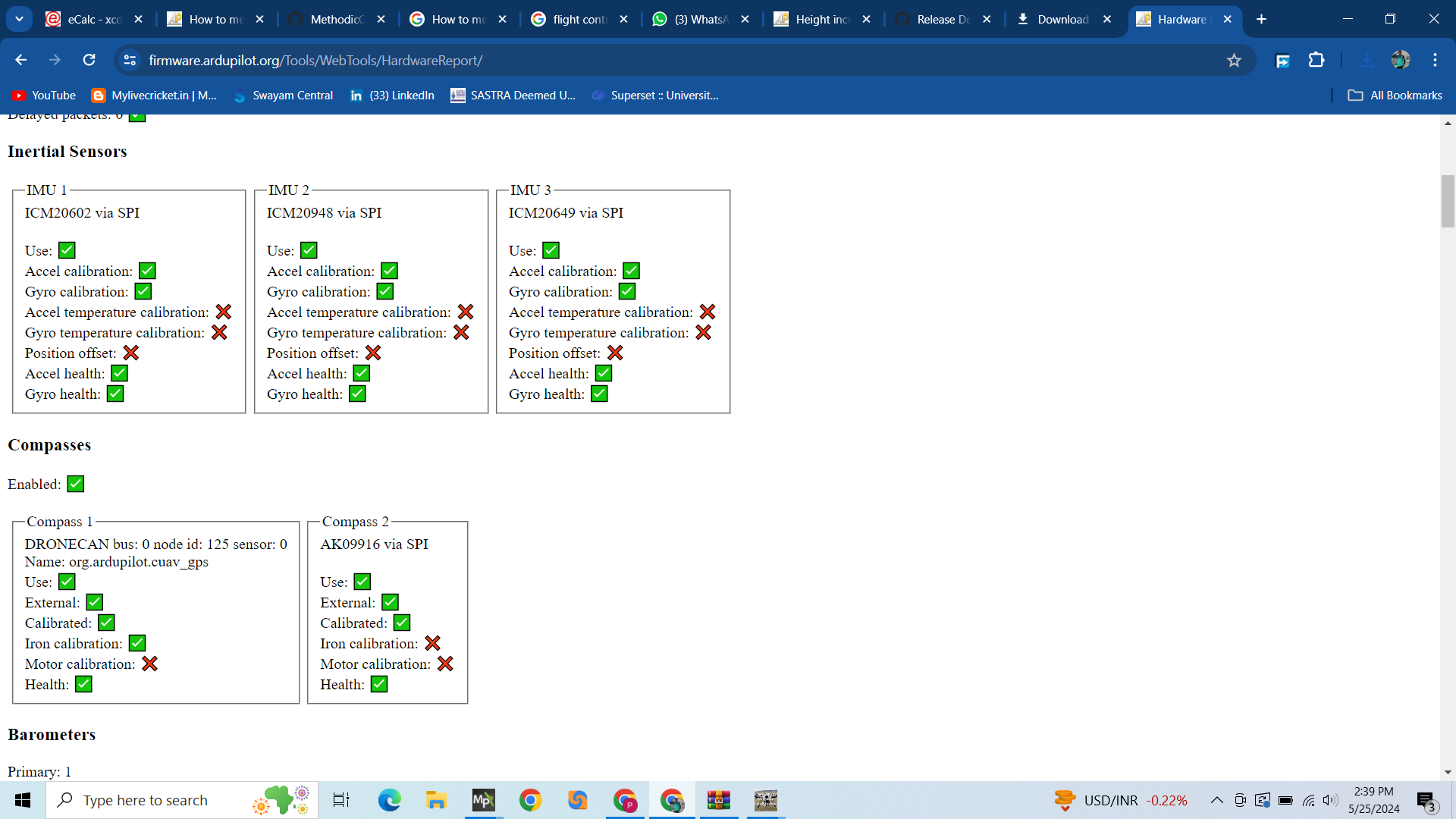
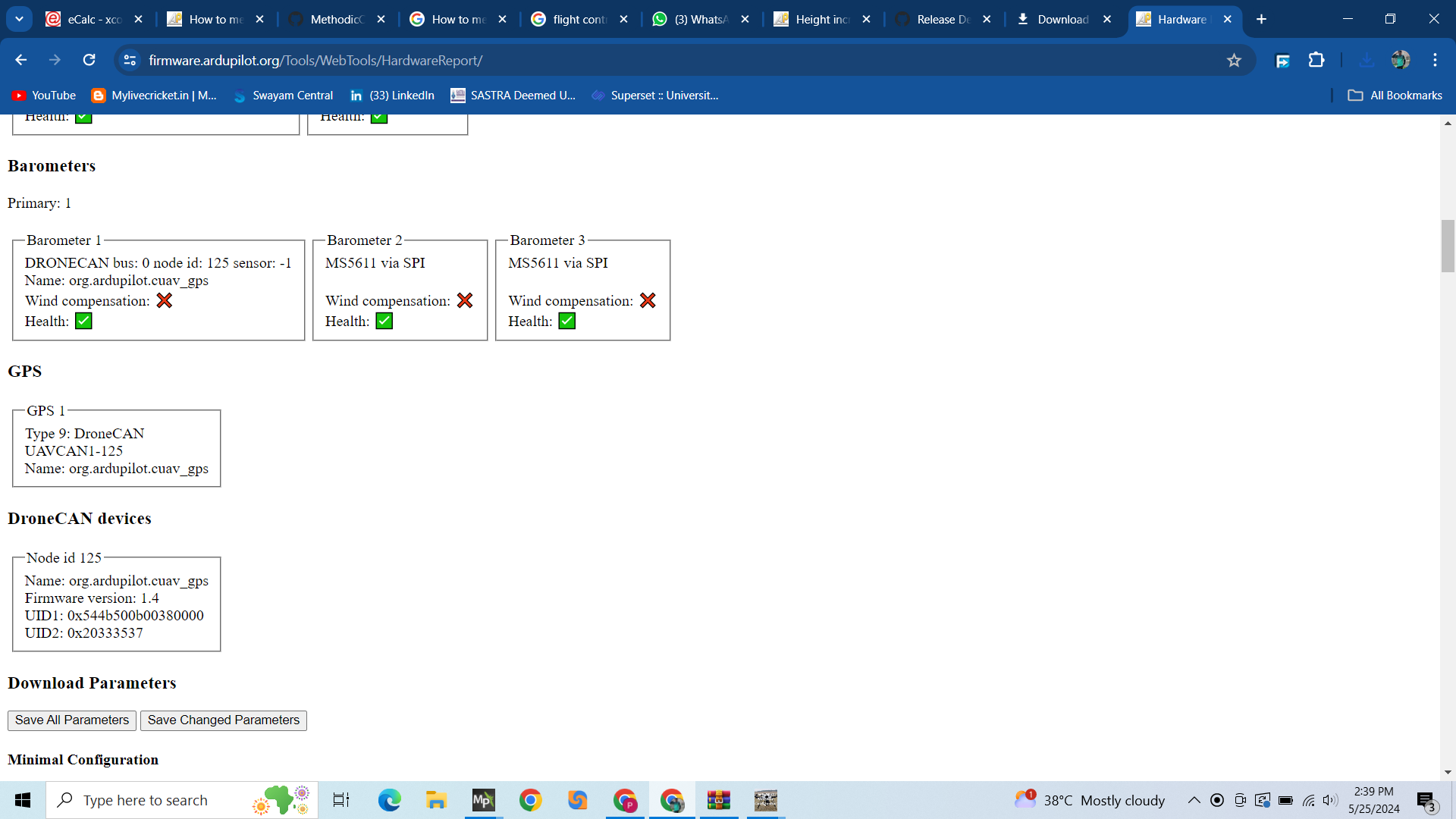
and regarding hardware report I checked some other drones which are working good but they also not having compensations
Then tell me what appears on the terminal window that the program launches in the background.
Yes, there are millions of drones out there that do not have temperature compensation and work great on normal temperatures.
You only see issues at low or high temperatures and not on all drones. And that does not happen very often.
It is showing no intermediate parameter files are found.
I want to first focus on wind compensation ,wind and Accel temp calibrations .I want to do auto tune also I will try by user manual and will update my results here.if I am facing an issue please guide me.Or will you suggest any other thing
Update the software to the latest version and retest. I think I fixed a bug.
Then create the vehicle directory from temple again.
Wind estimation and baro compensation work best once the other steps are done.
Ok will try and let you know
now the app is working i am working on it. Is INS_LOG_BAT_MASK is 0 in my paramters but i am using cube orange plus which as 3 IMU 2 gyro and 1 magneto .Is this parameter affecting my drone
All parameters affect you drone. And ALL need to be correctly set.
You need to configure each and every parameter for your usecase.
- The app can only guess around 80 parameters, these are greyed out and you can not change them. But you can prevent them to be uploaded by ticking off the upload checkmark in the respective parameter row. I do not advise that, but you have the option to do it.
- The other ones you need to manually change.
For your use case in the 02_IMU_temparature_compensation_setup.param activate all three IMUs by clicking on “new value” column.
thanks for the input .I had a doubt regarding telemetry connection which I connected in telemetry1 which is serial 1 connection but you started options from serial1 without giving serial 0 i.e.,usb so my doubt is for telemetry 1 will it come as serial 1 or serial2 as you did not give serial 0
Telemetry 1 is serial 1
thanks for the input I will test tomorrow. I am thinking of trying 3 other possible solutions as i am thinking may be because of air getting into fc
1)As i observed there is a huge height deviation while using blower so may be there is a chance of air going inside frame .so i will use foam to cover fc and try flying
2)If it doesnot work i will open fc and will cover barometers with cotton foam and will try it
3)if it is because of vibration i will try damping plate and will post results
Please share your input regarding my tests
Looks like you have read and understood section 1.1 of the How to methodically configure and tune any ArduCopter Blog post. Yes, I agree with your tests.
Because of other issues i am unable to test drone at present will update as soon as i did test
Out of this topic I had one doubt actually I wanna post seperate but before that I wanna take your input.Can we give sequence for triggering a single function .Like I wanna keep EMERGENCY motor stop for channel 10 but I don’t not want it to trigger by accident so can I get like if switch the button for 5 times I want to trigger the emergency stop
You need to program that on your RC transmitter. That is off-topic for this thread.