Wooohooo,
I read through this start to finish. I will answer some questions quickly.
First up MOT_HOVER_ LEARN. For this to learn your new hover throttle the copter has to be in a hover for 10 to 20 seconds. If the copter is moving up and down it won’t update the hover throttle setting. So if you take off after changing the load for the first time and switch into Alt_Hold you will probably need to recenter your throttle stick to stop the copter climbing. Also if your Accel I max is very small you will find your copter will sink (I think you have solved this problem already).
Just set your Accel I max to a big number, it only really matters if it is too small. This is something we will clean up in the next release.
Ok, the next issue is MOT_THST_EXPO. This is similar to what you are used to seeing with stick expo but designed to linearise the thrust of the esc/motor/prop to the pwm input. The effect of this is the output to the esc’s increase quickly at low ranges and slowly in the high ranges. So on an over powered copter the hover throttle will look very low. This is something you need to set based on thrust measurements but I have found 0.65 is a good number for most copters including all coax setups and 0.75 is good for very large props on quad hex and octo air frames.
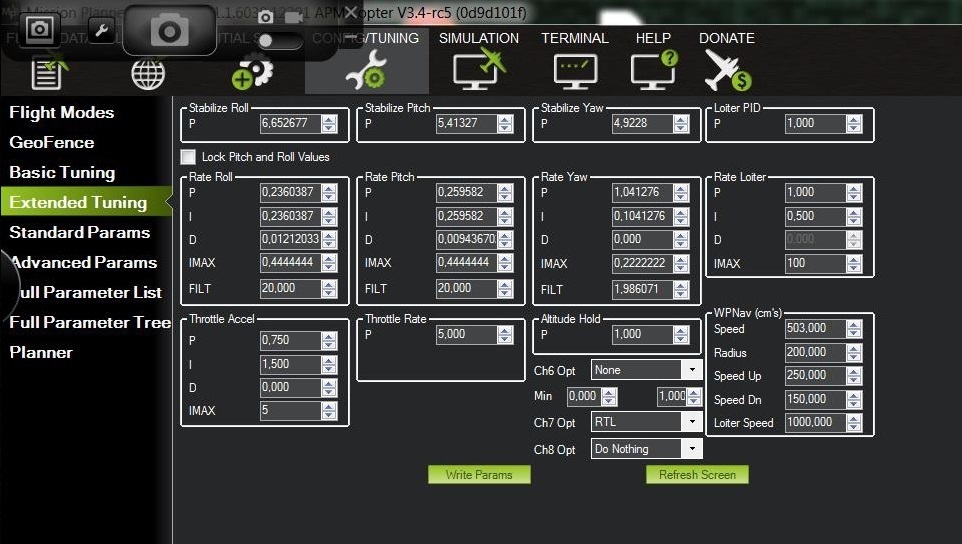
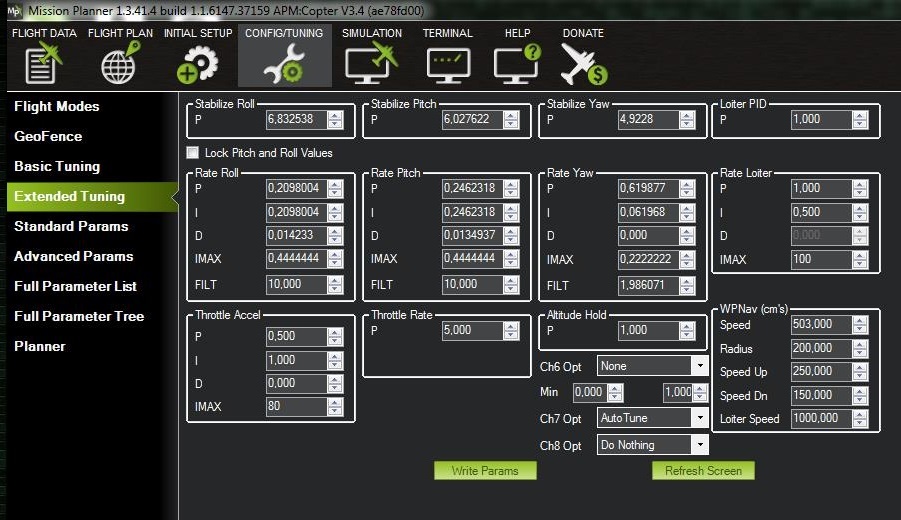
A word on parameter translations and variables in mission planner Extended tuning screens. Some numbers have been scaled in mission planner in that screen. I always use the direct parameter screen so I am not sure which ones are scaled. As we clean up the parameters and move to SI units this should all disappear.
Alt Hold. I have found on over powered copters Alt Hold can benefit from halving the Accel P and I values and both the Pos and Vel Z values.
Hot Motors: When your tune is aggressive your motors will heat up more. This is especially true when using ESC breaking. From one flight to another you may find rougher wind results in higher temperatures. If your batteries are on loose and you start getting some slight oscillation your temperatures will go up.
ESC Calibration: a difference of 4 not a big difference. If you did it using the manual calibration that is probably as close to correct as you can get it.
Ok, Autotune.
Autotune always starts from your current PIDs. It does not start from a default set. If autotune takes a long time it is often because you are tuning in poor conditions or have made a change that results in a very different tune.
Copter leaning to one side more than the other. This is caused by an offset CG (not your problem), side ways movement through the air or side wind (more likely your problem), different ESC setups on different arms (probably not your problem).
The way I ensure I don’t have wind loading effects messing up my autotune is to always place the axis being tune 90 degrees to the wind. So I let the copter drift while it is tuning. When I decide I have to bring it back I only use yaw and the axis I am not tuning. So while tuning roll, I would yaw the copter so it is facing directly away from me and use pitch to bring it back. While tuning pitch I will use yaw to put the copter directly side on to me and use roll to bring it back.
Tuning in rough air or having wind effected tunes can result in very significant variations in Autotune. This is probably why your autotune numbers vary so much.
Ok, I think I have covered most of the outstanding questions. If you would like some help with your autotune results then let me know exactly what logs to look at and what issues you are seeing. I know you have had many autotunes in this thread but you have also changed many things and fixed many problems so I am not sure where you are up to.
Hope this has been helpful!!