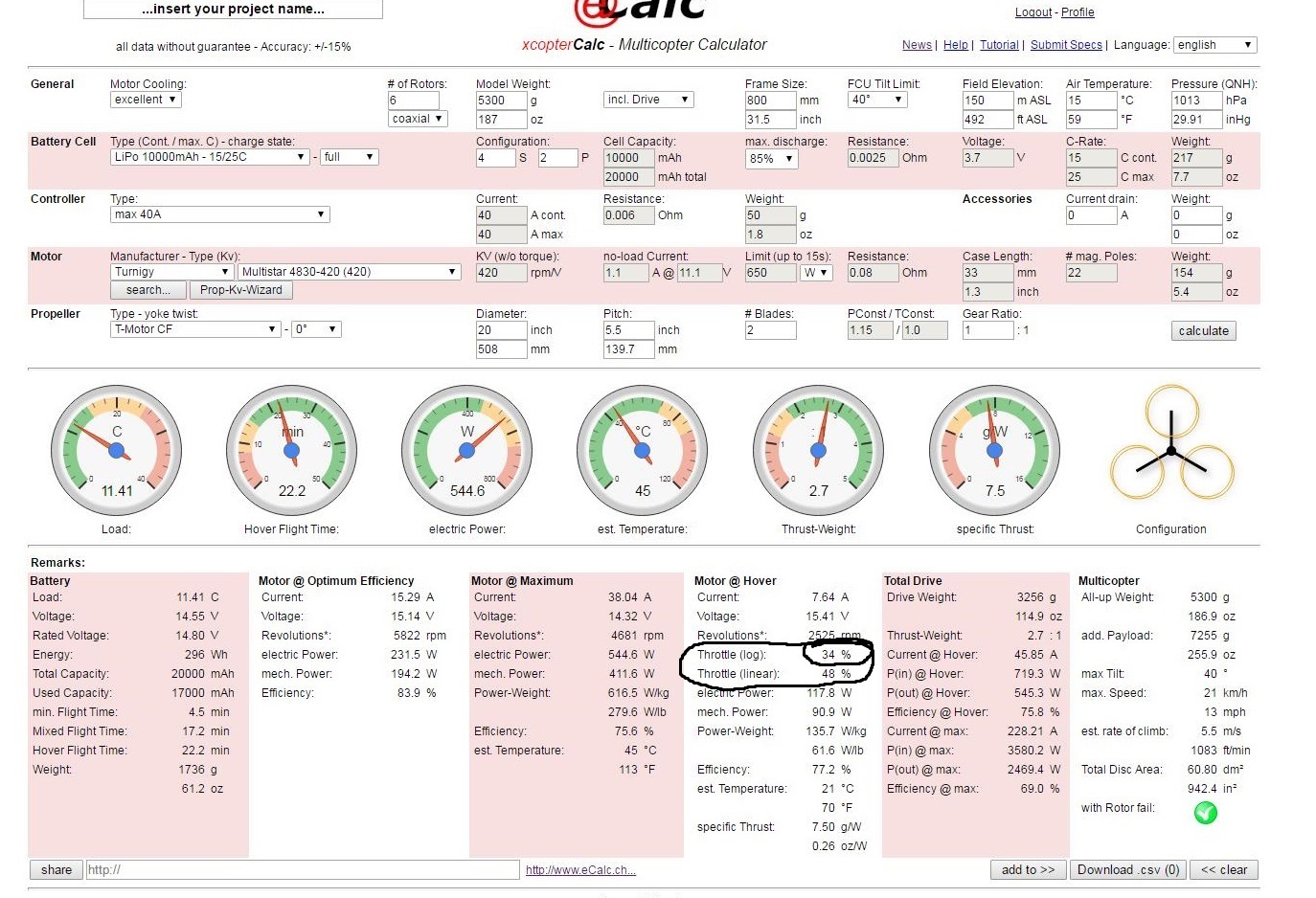
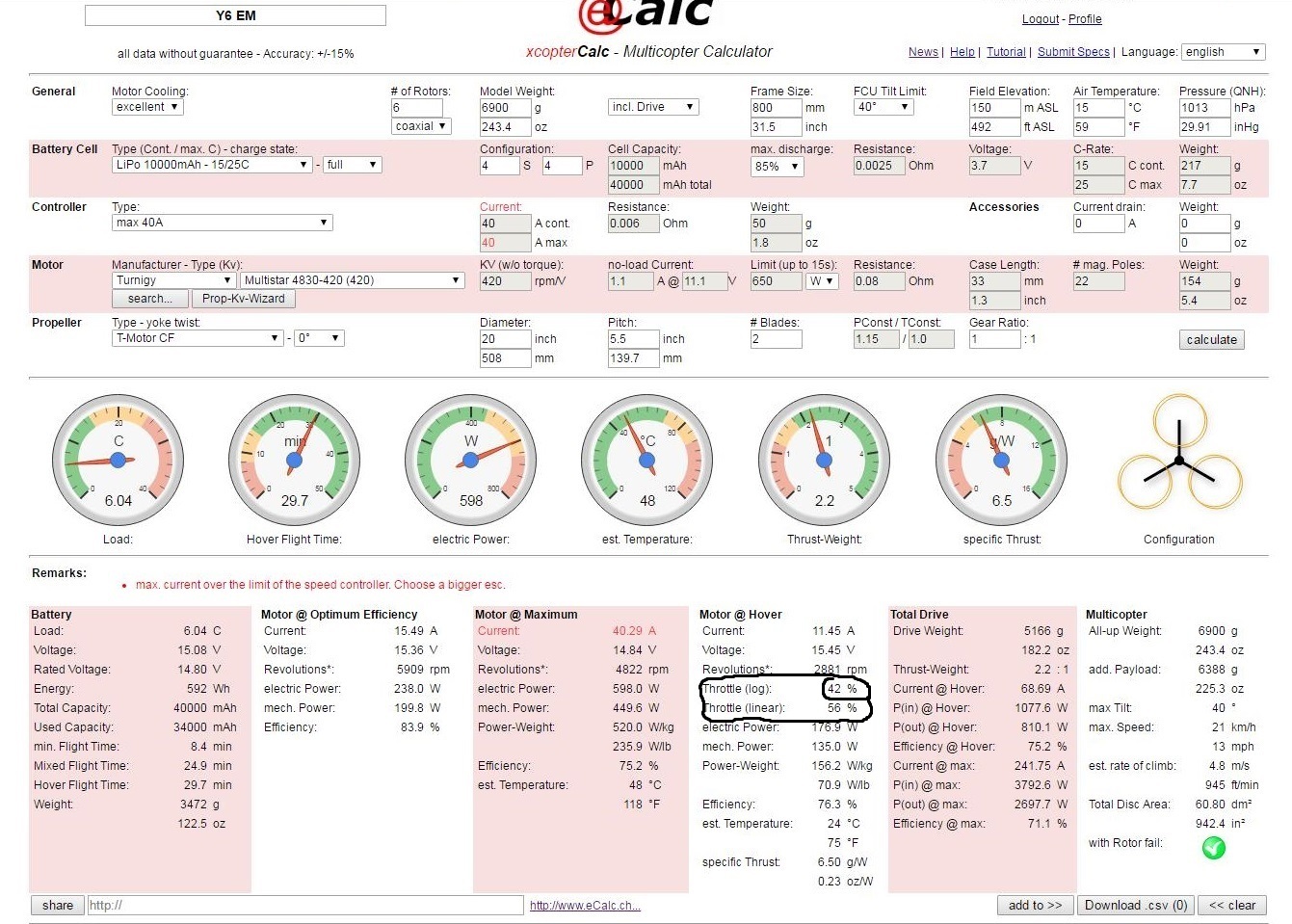
I will try…but…that data was ok with AUW 5.3 kg but not withe extra pack and 6.9Kg…Ecalc agrees with my first flight at 5.3kg…and with 6.9kg should be at 42% ?
RESULTS
AUW 5.3kg
AUW 6.9kg
AUW 9.0kg
I will try…but…that data was ok with AUW 5.3 kg but not withe extra pack and 6.9Kg…Ecalc agrees with my first flight at 5.3kg…and with 6.9kg should be at 42% ?
RESULTS
AUW 5.3kg
AUW 6.9kg
AUW 9.0kg
oK…today i made a new flight and autotune in 3.4 rc6…first things first
MOT_HOVER_ LEARN set to 2
In previous attempts it did not work…it showed some values (0.32)which are impossible for 7kg craft and this motors…
I set it at 0.42 which seems more realistic and Pix calculated value 0,3930785 so
MOT_THST_HOVER 0,3930785
AUTOTUNE
First i made tune of the Pitch and than Roll…separate(but finaly with 40Ah LiPos i can do both axes at same time)…
Pitch autotune seems ok but Roll autotune was somehow wrong,during left-right movements Y6 was leaning more to the right in his attempts…sometimes almost no move to the left(from my point of view)…wind was low…
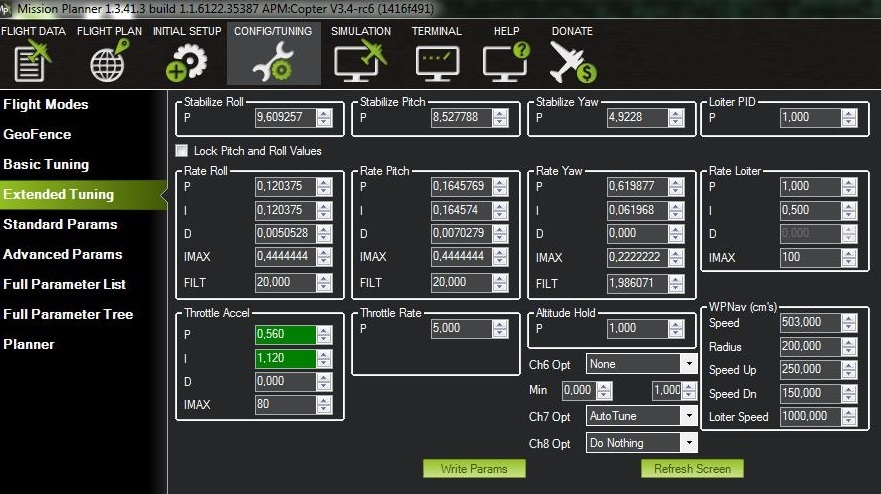
Stabilize Roll 9,609257 <<<<<<
Stabilize Pitch 8,527788 <<<<this are new values
FILT 20,000
THROTTLE ACCEL P:0,56 I:1,120
first are parameters Randy suggested
ATCRAT_PIT_P = 0.155…1,645769
ATCRAT_PIT_I = 0.155… 1,645769
ATCRAT_PIT_D = 0.0056… 0,070279
ATCRAT_RLL_P = 0.155…1,20375
ATCRAT_RLL_I = 0.155… 1,20375
ATCRAT_RLL_D = 0.0056…0,05052839
???
as happened to me before,something is wrong with the decimal comma…how else to explain this results
Afterwards i try to fly it ;after Pitch tune it was managable,but after Roll,craft start to shake,almost crash
Also i think iwe heard DISARM/ARM msg. in that attempt…
HERE ARE THE LOGS 23.10.2016
First 2016-10-23 14-31-43.bin is from Autotune,two smaller is attempt to fly with this PIDS
After Autotune my motors started to act weird,almost like ESC is not calibrated…at low throttle stick movement almost no throttle until at some point starts to spin almost at half throttle,uneven…
This is exactly same thing from beginning of this blog,when i at first thought something is wrong with ESC but actually it was about wrong PID (too high) translations
Also ,after i landed in AltHold after Autotune i was getting msg. of negative altitude,even after disconnect/connect LiPo(restart)
In Mission Planer AutoAnalysis (finally started to work…before MP did not wont to download and use that tool)
**Compass = GOOD - mag_field interference within limits (14.47%) **
or autotune log
Compass = WARN - Moderate change in mag_field (27.76%)
I guess my compass/GPS mount still no good…
Magnetometer/GPS mount.problem is not how it is mounted at bottom of the GPS stand but how long is rod…too long,and it vibrate very easy also ideal for catching harmonics…i will do the change once again…
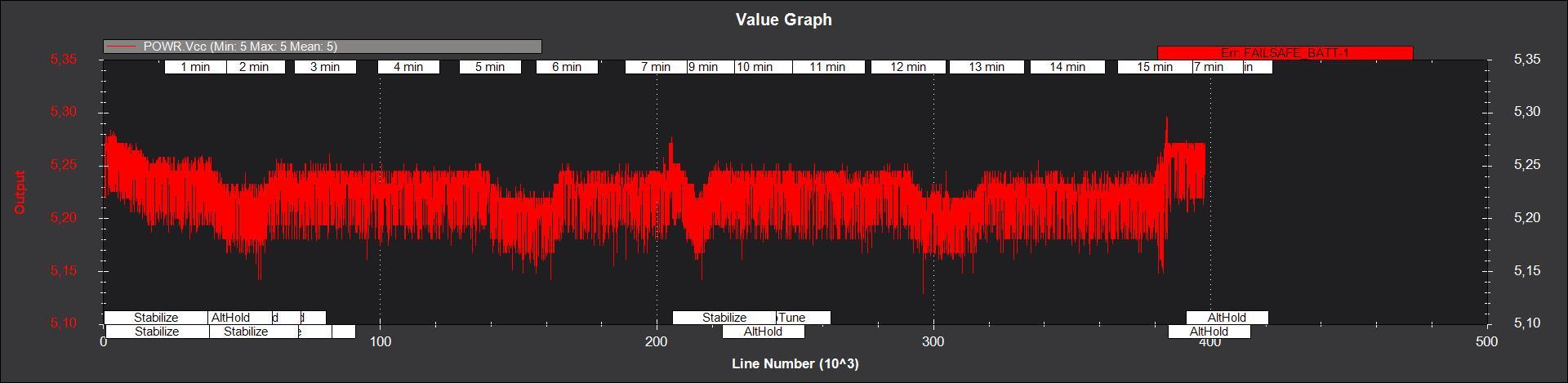
Test: VCC = WARN - VCC min/max diff 1.27682v, should be <0.3v
or autotune log**
Test: VCC = WARN - VCC min/max diff 2.58017v, should be <0.3v
I do not understand this warning…?it seems ok to me,or?
HM…
I think i found another mistake…nobody noticed this before…
If you look to my Extended Tuning screenshots,all showing same mistake;
Throttle Accel IMAX is 5 !!!
Is this another example of bad parametar translations?
I never touched that parameter ,that’s for sure…
I noticed that only by comparing other people’s parameters and when i uploaded 3.4.rc6 to my X8 from 3.3.3
Everybody else have that parameter set to 80 including my X8…
Another try…today i did short flight without ground station(copter was in car tablet at home,short time between rain)
Here are my new pids…i got them from 2 day ago autotune but comma was on wrong place at first…also i change Throttle accel IMAX to 80…GPS stand i made it shorter and also i completely kill double suspension leaving only 1 orange foam under Pix…i must say this orange foam is BS bcs. after only 1 year it loose elasticity and starts to tear apart…waiting for MoonGel…but vibrations seems ok anyway…
LOG 25.10.2016
About this flight;everything seems fine but Y6 feels slow on Roll,not following stick crisp enough…pitch and yaw is ok
Only thing i noticed is my motors are hot again, i don’t understand that bcs 2 days ago after Autotune of 17+min they was almost on body temperature…today seems like that doubled (i didn’t have instrument to check)
One of my previous questions ,nobody answered,was;
How can i make Autotune shorter or to start from PIDs i already have?
I do not know if i am right but i will set AUTOTUNE_MIN_D to 0,003 from default 0,001(my Y6 is never under 0.005 anyway…) maybe that will help…
Also i must say that is very frustrating to wait for any kind of answer…i understand this forum is on volunteer base and no one gets payed for that,but as a serious project you can not expect from one man to;write software,test it and also answering all the questions and who knows what else(i guess he have his private life as well)…you all know who that person is…
Also i can not understand who is in charge here or in Arducopter project,also who will answer questions about Pixhawk 2 almost realised in stores?
Who is the captain on this ship?
Can this developers also take a look here?
Do we need to pay for it,if so,tell us how much we can contribute(i already did few time with small amount),but don’t leave us in the dark…
I wonder why none of the first,lets say,100 drone service companies use Pixhawk,except maybe for terrain mapping and inspections…in Aerial Photo/Video industry there is almost none…Camera gimbal corrections thru Mavlink from AutoPilot GPS(like DJI gimbals) is still not mentioned anywhere…On Facebook(only platform where you can follow development of Pixhawk 2)i connected Philip Rowse with people from Gremsy(best gimbals you can buy at the moment) who promised to do something about it and developer from Gremsy answered it will be easy with Mavlink,not complicated like DJI Canlink hacking…did anybody do something about it?
I spent last 4-5 years mostly on Pixhawk,now i am wondering was that a big mistake…yes it works nice with small quads,but with big birds problems starts…and i can’t afford myself uncontrolled behavior with 7…10 or 16kg aircraft…and you never know what is going to change and where next problem will jump in…(i manage to got them all in this 3.4 RC adventure)…and there are changes on weekly basis…i know,you will say i can use stable version,not Release Candidate,but please don’t be ridiculous…3.4 rc is so much better than 3.3.3/4
I got comment from Randy that my Y6 is;“looks a bit over-engineered”…i think Pixhawk is over-engineered too,and demands all kind of unusual solutions…once i did setup with DJI Naza and it was working as expected almost out of the box…
Yes it is cheaper,but if your time is money,Pixhawk is most expensive AutoPilot in the World!
In past 30 days i spent more than 40 hours on it…the whole working week in adjusting,making mistakes(very few was my fault),autotuning…writing about it the best way i can,and answering myself on my questions…
All this criticism is in best intentions,and i am very grateful to Randy and others who wrote here and try to help.
I still think ArduCopter is the best…and after APM 2.0 and few Pixhawks for sure i will get Pixhawk 2
While i was writing this,my Y6 was connected to MissionPlanner on my PC with usb…
In that time(some 30-45min) altitude displayed went from zero to 8,20m…my Y6 just standing on the table,i didn’t even touch him…
When i 1 min.later disconnected USB,connected thru mavlink radio,now MP shows negative altitude of -1,10…after 2nd restart altitude display seems normal again…
Can this be the same problem as this?
http://discuss.ardupilot.org/t/altitude-display-error/8588
Emin
They should not operate 10 kg copter with a beta version.
Rainer,but what to do…on my AUW 7kg Y6 and 10kg X8 I have only Pixhawk …and RC(especially rc6) version is much improved to a year old 3.3.4…on my 16Kg monster i didn’t decided about AutoPilot yet…for now i am just testing on Y6 whose behavior i know very well…
In the meantime i am having fun with my Phantom 3 while i am waiting for Mavic…i just hope my big birds won’t need DJI!
Emin
2 years ago I had a bad experience with beta. Copter went to 2800 meters to the lipo empty, crash
Emin,
i also fly a y6B with 3,5-4,5 kg AUW.
I never managed to get good results out of autotune, so I decided to tune the PIDs manually, what is really easy with parameters put on a knob of your FC.
There are good guides to tuning AC and you will get much better flight performance. I think autotune is optimized for standard setups (quad 2 kg) and will not work with larger and exotic machines like yours.
Many thanks for sharing your frustrating experiences - I also like to try new releases, but for productive work (agricultural mapping) I still use 3.3.3 which offers everything I need.
Hubertus
Thank you Hubertus…i never thought of Autotune as dependable on what type of a craft…autotune try just the same thing you do manually,what is maximum acceptable value…in the past autotune was ok,even on this Y6…i must admit i do not use manual tune since autotune is here last few years…
In my last AT there was one short moment after pitch and before roll tune(separate) when Y6 was exactly how i want him,1m,7kg craft was responsive as Phantom…but that value was 10x(1000%) times bigger than usual…i am sure something else is wrong,not AT…
I wonder where Leonard Thall is…he is the one i need…if anyone knows him please say some kind words…
As one of the members pointed me,it is not clear what my questions are…i manage to solve almost all but there is few left so i will try to summarize…
What about very fast disarm/arm msg i heard from mission planner in 2 out of 15 flights,while craft was in the air?!Maybe it was more bcs. voice was not on all the time…
Why are the values I got from AT 10x times (1000%) bigger than usual(also with first AT was 2x(100%) bigger)??
Also during Roll AT it seems to me Y6 leaned for test to one side more than another…
If i use double LiPo, 4 instead 2 (40Ah vs 20AH) as dummy weight and also connected,could this significantly effect results of AT?I will fly with 20Ah and gimbal instead extra LiPo
What about ESC calibration?
Two of them calibrated minimum 1028 instead 1024 like all others(max is 2020 on all) …
Should i set all to same min value?
In Mission planer min-max is set to 1000-2000)
PPM centre throttle(in ESC BLHeli settings software) is at 1500 when actually mathematically middle is at around 1525…default BLHeli settings is 1488…but i don’t use central throttle,is this important at all?
PLEASE TAKE A LOOK AT BLHELI SETTINGS IN ABOVE POST…
Why my Throttle Accel IMAX is 5 where should be 80 or some 2 figure number?
Could some of this problems be connected with my Windows 10 tablet,don’t know how,everything is working well,but who knows?
What about Pixhawk memory card,how big or fast it should be?class 10 4 GB ok?many things are enabled in logs?..my Pix is original and old,ROM is only 1GB…i remember something like that and logs…
What could change between 2 flights;one was Autotune of 17+ minutes motors were just slightly warm(almost body temperature) and in my next flight 5 minutes long they were double that?
How can i start Autotune from the values i already have?
Is it parameter AUTOTUNE_MIN_D or there is something else?
What about changing in altitude values from baro if copter just rest on the ground for some time?
8 meters in 30+min in my case,copter had some 8 GPS thru window and HDOP around 1
also i noticed that before when i left it in the field not flying…
also showing negative altitude values after landing in alt hold as well…
Why Mission Planer AutoAnalysis showing problems it does not exists?VCC Warn…
Also some other values are NA (i guess Not Available)…autotune,balance/twist,PM,Pitch/Roll,Thrust
Can we make this tool somehow better,graphical maybe similar to Forest excel sheet?
What about GPS/compass,accel signal from AP to gimbal thru mavlink to avoid horizont drift in extreme situations?
Where is Leonard Thall one of the authors of Autotune,man who knows it like his pocket?
Who will be responsible for answering questions about Pixhawk 2 problems and where that will be?
Hello Emin,
For a minor preface let me say that my experience far below of experience of developers here. So everything here is just IMHO and I could be totally wrong. Hope people will correct me in this case.
It seems guys there have got a real crash due to disarming in mid air. But it happened just once and there is a good chance it was just a coincidence.
It could happen due to your copter size and mass. It depends what do you mean as “usual”. I unsure results for your copter may have same values or scale as results for 450-sized drone. More weight, more inertia moments, more power needed to start motion and to stop. It’s not just about motors and battery power.
It could. Even a battery position or orientation change could lead to different values after autotune.
I believe you need to set all ESCs to same min/max value. I believe 1500 vs 1525 vs 1488 it doesn’t matter for copter while have all ESCs configured in a same way.
To be honest I have no idea on that. It looks like IMAX can be considered as a max value for autotuned rate of I.
Compatible memory card list for pixhawk: https://pixhawk.org/peripherals/sdcards
I believe that average temperature of motors could depend on PID settings. As soon as you get control more sharp and aggressive, it will apply more powerful impulses for attitude change or correction. It means temperature will grow also.
So far I can see it starts autotune with current PID values, not with some default values: ardupilot/ArduCopter/control_autotune.cpp at Copter-3.4 · ArduPilot/ardupilot · GitHub
It could be pretty much ok due to air temperature and atmospheric pressure changes. Everything it could rely on to calculate barometric altitude is atmospheric pressure. Then value could be fixed with correction from GPS.
I never used auto analysis, so unable to say anything here. Sorry.
Unsure GPS is able to provide orientation data. AFAIK the GPS is about position, not orientation. Also typical drone GPS module have 5-10Hz data refresh rate that seems not enough for any stabilization tasks.
LMGIFY ![]() No idea, really. But now I get curious and going to google. Thanks for pointing.
No idea, really. But now I get curious and going to google. Thanks for pointing.
Not me so far ![]() You may ask this question here: Pixhawk 2 Getting Started - #68 by proficnc
You may ask this question here: Pixhawk 2 Getting Started - #68 by proficnc
regards,
Dmitry
Woow Dimitry…that is The Answer…thank you…i will try to explain
It happened to me,and more than once to others…i remember Randy answered to someone that is maybe only mission planer issue,nothing to learn there…but thx for links and connections…
for normal value i ment similar values i had before(this is not new copter,but in his 3rd reincarnation) and values Randy suggested…i am talking about values of 1,6 instead 0,16…
I didn’t mean position and COG but values of current/voltage…hmm…my english is poor
hm…i will have to study this more…now i remember how i was against Robert Lefebvre when he critisize BLHeli and SimonK,but now i have to humble agree that this add more complexity in already complicated thing…
My wondering is about PID translations,something must go wrong here…
thx,mine is on the list…
I know that,of course,also motor timing…my wonder was bcs.Autotune is also aggressive (mine is at 0,91 20Hz) and next day with moderate PID 5 min calm flight hot…Sabilize Roll and Pitch was a bit high…
Ok…i guess i knew that bcs in past i made few autotune in a row…what about parameter AUTOTUNE_MIN_D?
Hm…and hm…
me neither… 
You have to study more how DJI gimbals work and why are they so successful,from small to big ones…also check why Movi freefly uses GPS on gimbal…also check Gremsy H3,H7,H16 users why they pay extra 150$ for CanLink connection between gimbal and AP…this are the best…it has to do something with position between aircraft and gimbal…HORIZON DRIFT is keyword…my english is to poor to explain well,sorry…
DRIFT FREE HORIZON
The control algorithms developed for the MōVI stabilizer utilize a very high accuracy GPS. This GPS allows for acceleration correction when the gimbal is used outdoors and has a GPS signal. This feature is useful when used on cars and helicopters where sustained extreme accelerational forces can cause non-GPS aided systems to drift.
He was always great help…also i liked Marco Robustini and his great demos and bright observations…
I wasn’t aware of that…sometimes i wonder how many people knows this forum exist and they can find answers here…for sure it is much,much better organized than last one…
Hello Emin,
First of all let me say that we appreciate your testing, it is important to test frames that aren’t the most used. I understand your frustration but, because you use a more unusual frame type, there is even less people with the knowledge to answer your questions. On the other hand, I have to say that you are trying too hard: frequently writing long posts with more and more questions and constantly editing those same posts makes it very hard for anyone with short time to give you an answer (I had to read your last post 3 times since you edited it 8 times in two hours).
You asked how much money you would need to give to get answers. Let me answer with this: OpenHub estimates the code in ArduPilot to cost $2.405.233 and that’s without any support. We would love to have the money to hire resources so that questions don’t go unanswered in the forum, but we just don’t. Hopefully this community can grow, people can learn with each other and support from developers can be minimal.
Now, let me answer some of your questions (as I don’t have answers for all of them):
We have heard of this, but without any crash so we believe that it is a bug in Mission Planner. If you have a dataflash log with the respective tlog it can be helpful.
Windows 10 shouldn’t have nothing to do with your problems. Regarding the memory card, faster and bigger is better. If I’m not mistaken class 10 is enough, 4GB can be fine, but it depends on how much logs you want to keep and how much information you log in each of them. In any way, the SD card shouldn’t have any connection with the way your vehicle flies.
Baros drift with time, this a known issue. GPS is usually not used for altitude as it can be even more unreliable.
Questions about Mission Planner should be posted in the appropriate category, I can’t answer it.
I’m not following what you are asking here, can you explain your question better?
Working. He is listed in our commercial support list (http://www.ardupilot.org/ardupilot/docs/common-commercial-support.html) so you may contact him for paid support.
As with all hardware, any issue should be taken to the store where you bought it, and in last case, to the manufacturer. If the issue is regarding software, namely ArduPilot, you should post on this forum.
I will try to get answers to your other questions but I can’t promise that I will have answers fast.
Thank you Francisco
You are absolutely right about my posts…
I must apologize to everybody for that multiple editing…i will really try harder not to repeat that…
Part of that is due to my inexperience with posting in this type of forums…so when i get some answer or comment i rush to respond back…and,than later i remember something else…i believe english word for this is half-cocked (that does not sound good when i try to translate to myself )…also my english is not good enough so when i review my text i see multiple mistakes…
I will try to concentrate more…
About answers…
So…we have 2.3.4.5…unanswered
i feel much better now…thank you all
regards,
Dmitry
@ Dmitry
3. Eh i know that too,but cant figure how and why…
5. When i was reviewing my settings and also after uploading new software to my X8 i noticed my Y6 Throttle Accel IMAX is 5,where X8 have that parameter at 80,and others have some 2 figure number too…In this adventure(at beginning of this blog) i had problems bcs they did some PID translations to new values and on some frames was small mistakes and wrong translations…it’s connected with number 2 as well,and that is also reason why i asked question about tablet,maybe he put comma in wrong place,or communication with craft was not ok(no trace of that)
Wow,
This is a long thread. I was hoping to go through it tonight but I will have to wait until the weekend.
I am sorry for the delay!
Thank You…
No problem,now when i got your attention i can wait as long as it takes…