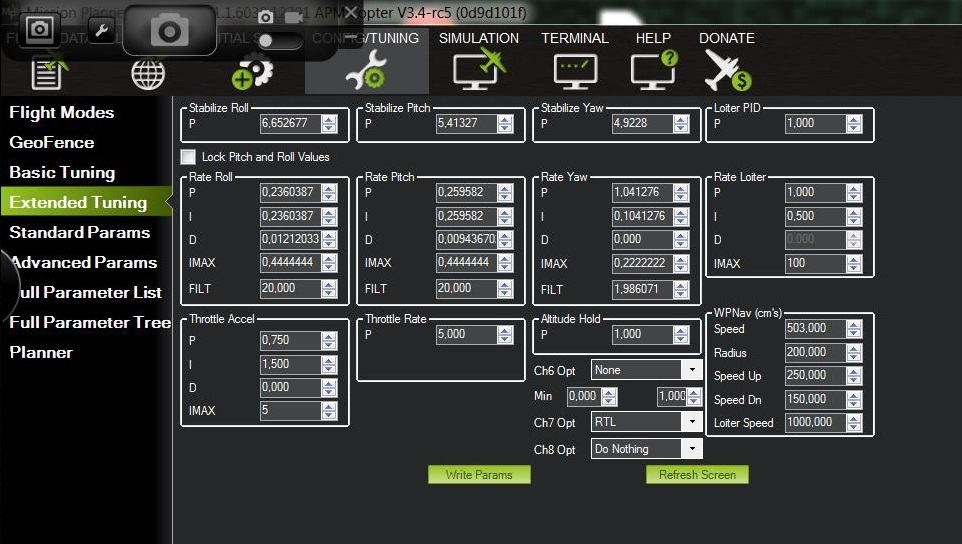
somehow FILT changed from 20.000 to 10.000???
I don’t know what FILT is…i guess something with kalman filter…
SOLVED That was me changing it before…but maybe that is wrong? Clumsy flights started when i changed that parameter! "For large copters (with props at least 13inch or 33cm diameter) set the Rate Roll and Pitch filters to 10hz (in Copter-3.3 these are RATE_RLL_FILT_HZ and RATE_PIT_FILT_HZ, in Copter-3.4 they are ATC_RAT_RLL_FILT, ATC_RAT_PIT_FILT)"
also after reading around this forum i found this answer from Randy
rmackay9 Aug 24 @adolfotregosa, I don’t think it needs to be exactly 10hz… but in general, what this filter does is smooth the vehicle’s rotation rates before they’re sent into the PID controllers. A higher filter value (like the default 20hz) smooths the rotation rates less, a lower value (like the 10hz recommended for larger copters) smooths them more. With a small copter you want to keep it responsive and it’s motors can react more quickly, so you don’t want much smoothing so a higher filter value is better. For big copters though, they can’t react quickly anyway (big inertial from the vehicle and props) so you can smooth the rotation rates more so a lower filter value is better.
Let me make a few considerations … sorry if I miss something:
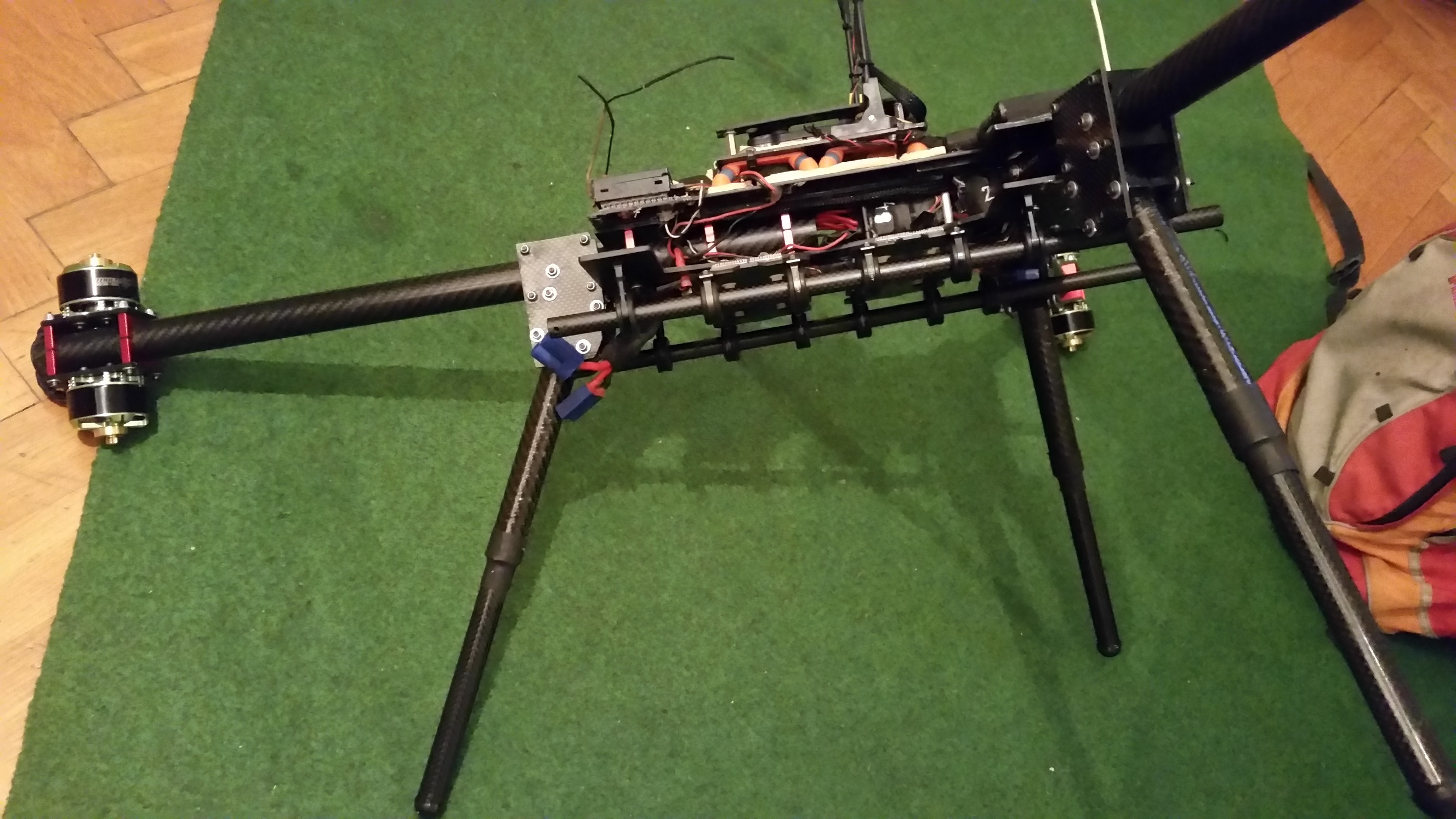
never seen a gps mast mounted together with a f.controller. I`m wondering if that mass inches away from the fc in a mast would have a rule. mine is sticked on the top plate of the carbon frame.
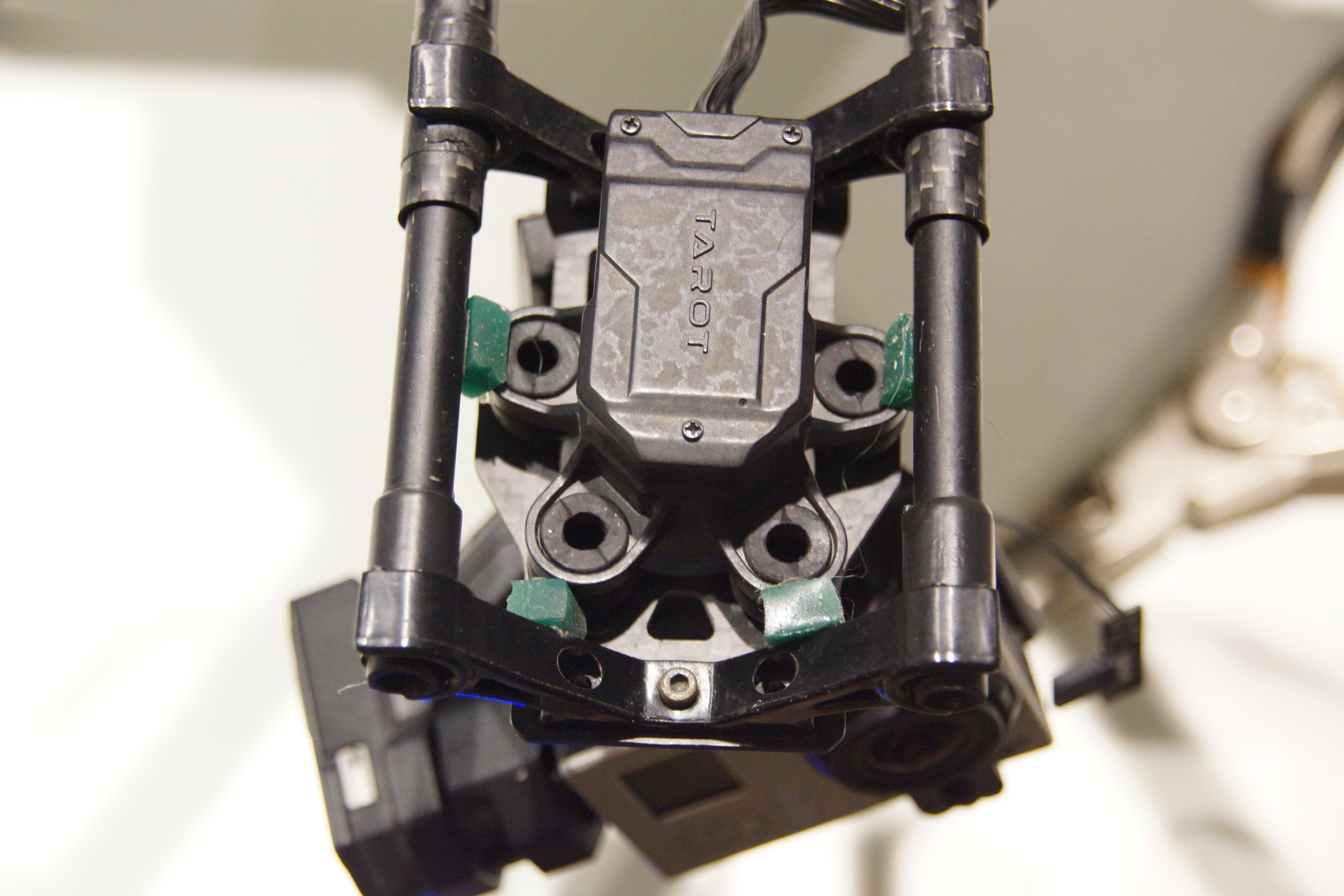
I have the very same mounting in my pixhawk, but only using one set. It is awesome and i can keep all my vibrations below 7 on the worst case scenario. After dinamic balancing all props I could lower all below 3. So use only one because I don’t know if they were projected to be used like that.
Don’t think that dual dampening is beneficial. It could cause harmonics. I would just tape the px4 alone on the red antivibration mount and make sure all wires have some play to prevent vibrations from reaching the controller.
Leonard helped me on 3.3. to get better autotunes by making sure my batteries were firmly mounted on the frame and didn’t bounce on autotune. I’m also running two packs of 4s 10ah. Make sure there is no play or try to minimise it to your best.
My guess is that the high vibration on X and Y axis are the root cause of your problem. Not stating that, but i’ve find out that less vibrations makes the flight controller very very happy I would try to lover it to something below 10 , which I presume it is very easy with you HW, than redo everything from default ( or a flyable manual tune ) pids, including autotune.
About your observations 1. I we tried all kinds of position of GPS/compass last 5 years…
anything closer than 10cm(i would say 15) is to close for interference,especially for sensitive M8N GPS…where your wires from GPS/compass go is also important…also you want GPS antenna to be above all other antennas,as most sensitive one…
I we tried all kinds of GPS mast…some was twisting,some was unscrewing,some was braking…most of them vibrate…especially with GPS ground plate which is prefered in range of 5-10 cm …to prevent that i placed everything on suspense,and make mast double,to be sure everything is firm and solid,and don’t change position easy…
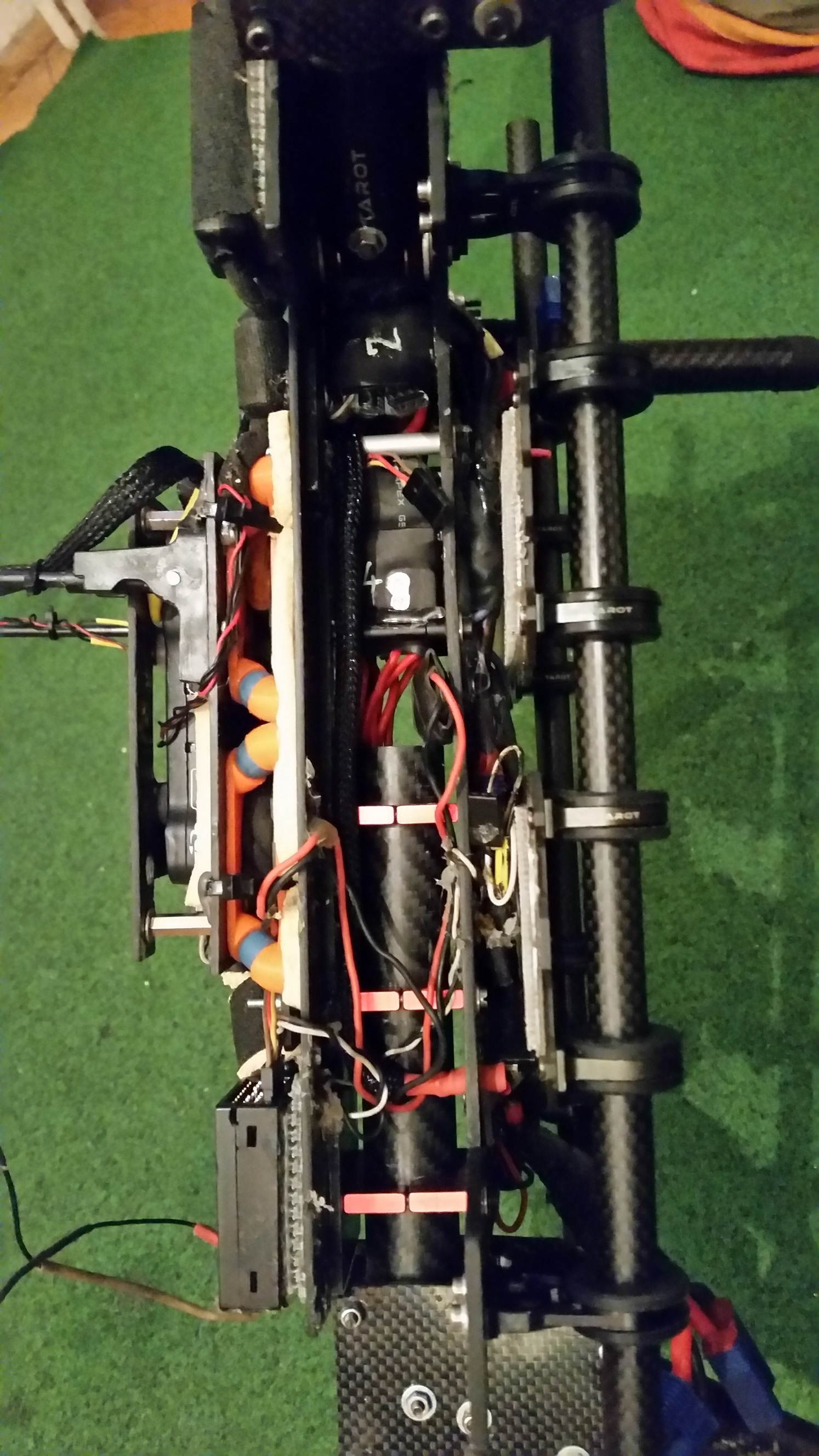
**2.**That mounting itself is not much…if your craft vibrate,(almost impossible to avoid with 20" props,no matter how u balance them) blue silicone rubbers are too soft and Pixhawk is too light and everything vibrate together…also i used two to be able to mount more things,but also because forward-backward movement is bigger when mounted like usual…to avoid some vibrations, you can make “sandwich” construction with pixhawk in the middle in between something what does not transmit vibrations…before i made it stiffer mine was like this
**3.**Actually there is not much possibilities to produce harmonics with this so called dual dampening…take a better look in above posts…first orange foam is squeezed at bottom with carbon plate and is used only as softer contact between bottom of the mount and frame top plate…there is no play at all there…on the top two mount are connected with another cF plate and above that is another orange foam under Pixhawk but also squeezed with top carbon plate where contact to Pix is only made thru silicon rubbers you find in PC hardisc vibration absorption system(this rubbers were choosen exactly to be a bit stiffer than orange foam…
All the wires are somehow attached to the frame and with foam or silicon on places where they touch frame…
ACTUALLY YOU DO NOT WANT WIRES TO HAVE A PLAY because in the flight there is a lot of wind and then you have additional vibrations…nothing on top part of my copter have a play,and that is how is supposed to be…
Also,all this discussion about that is irrelevant since i made everything much more stiffer in my last 3 flights
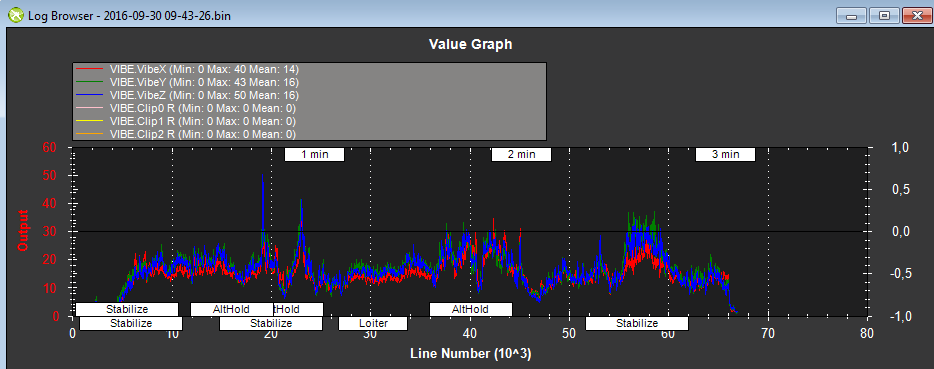
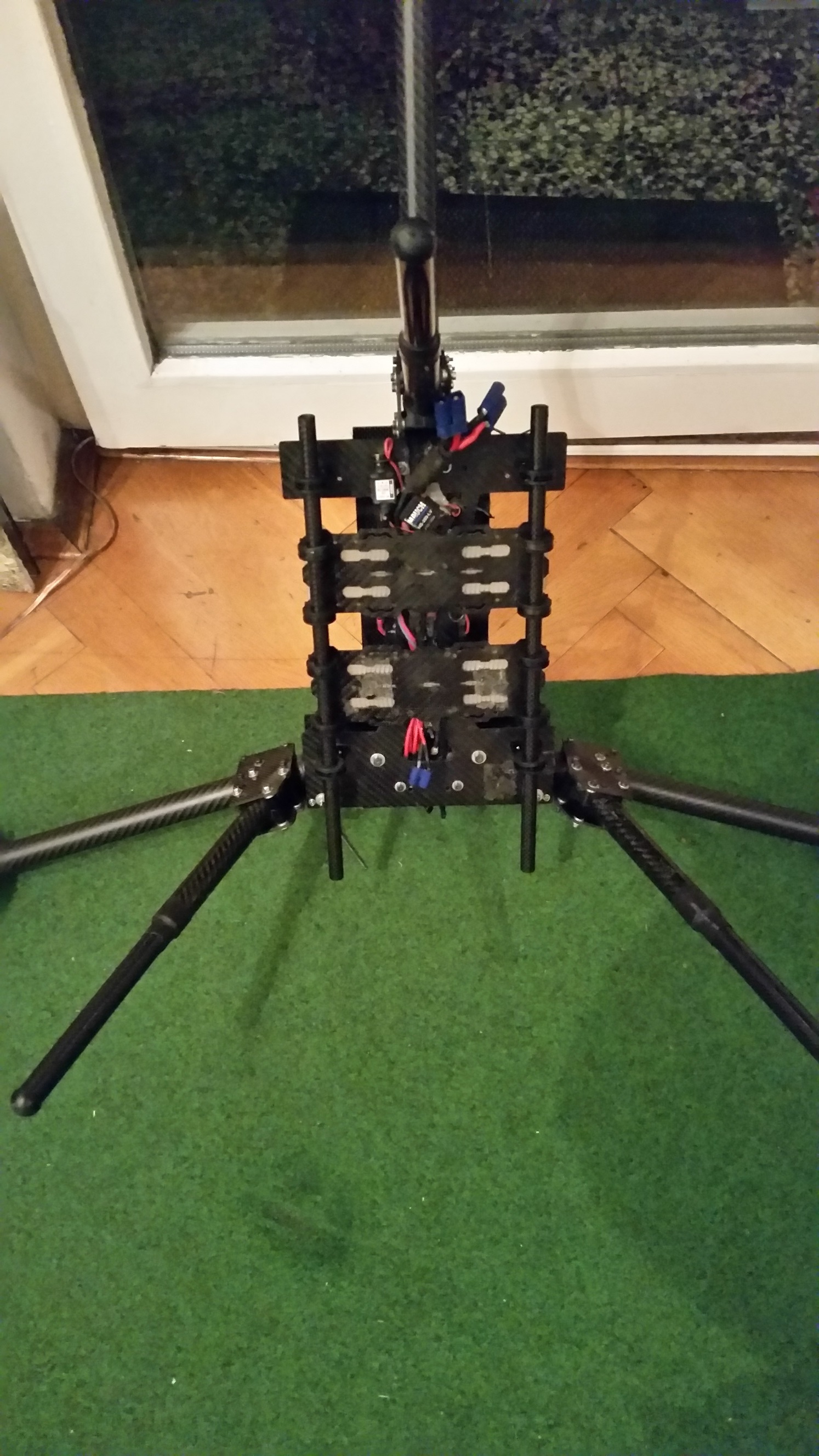
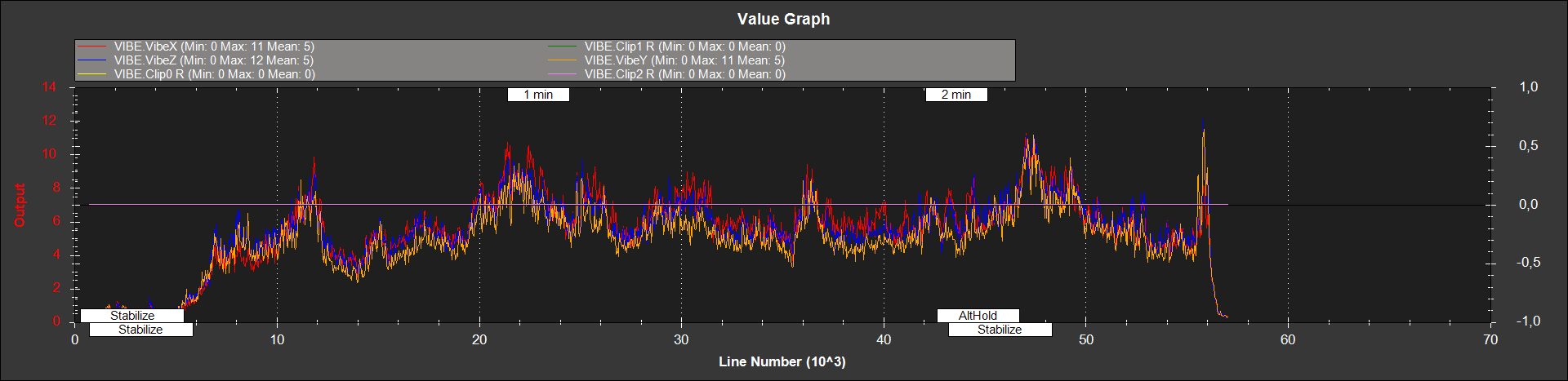
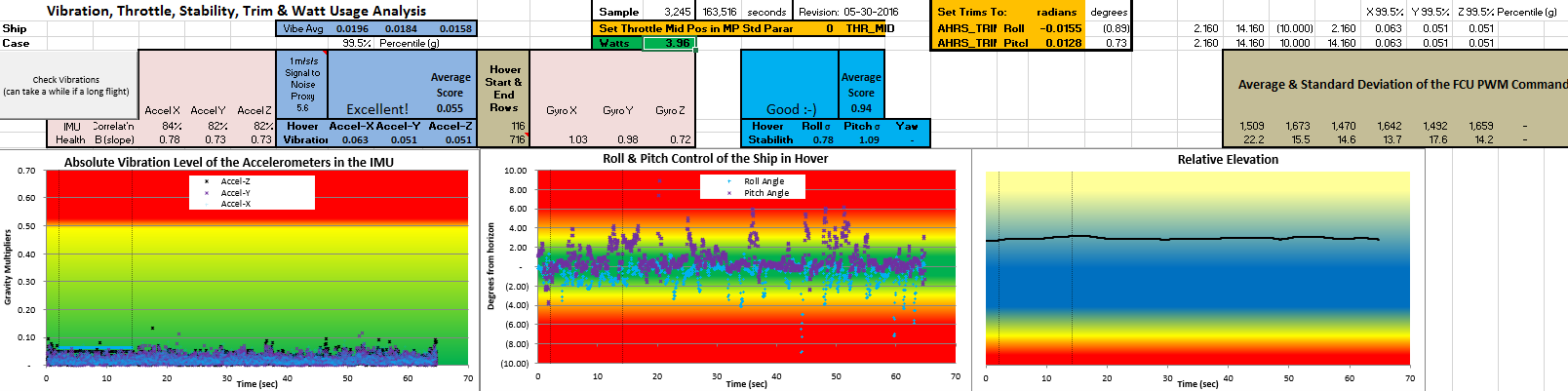
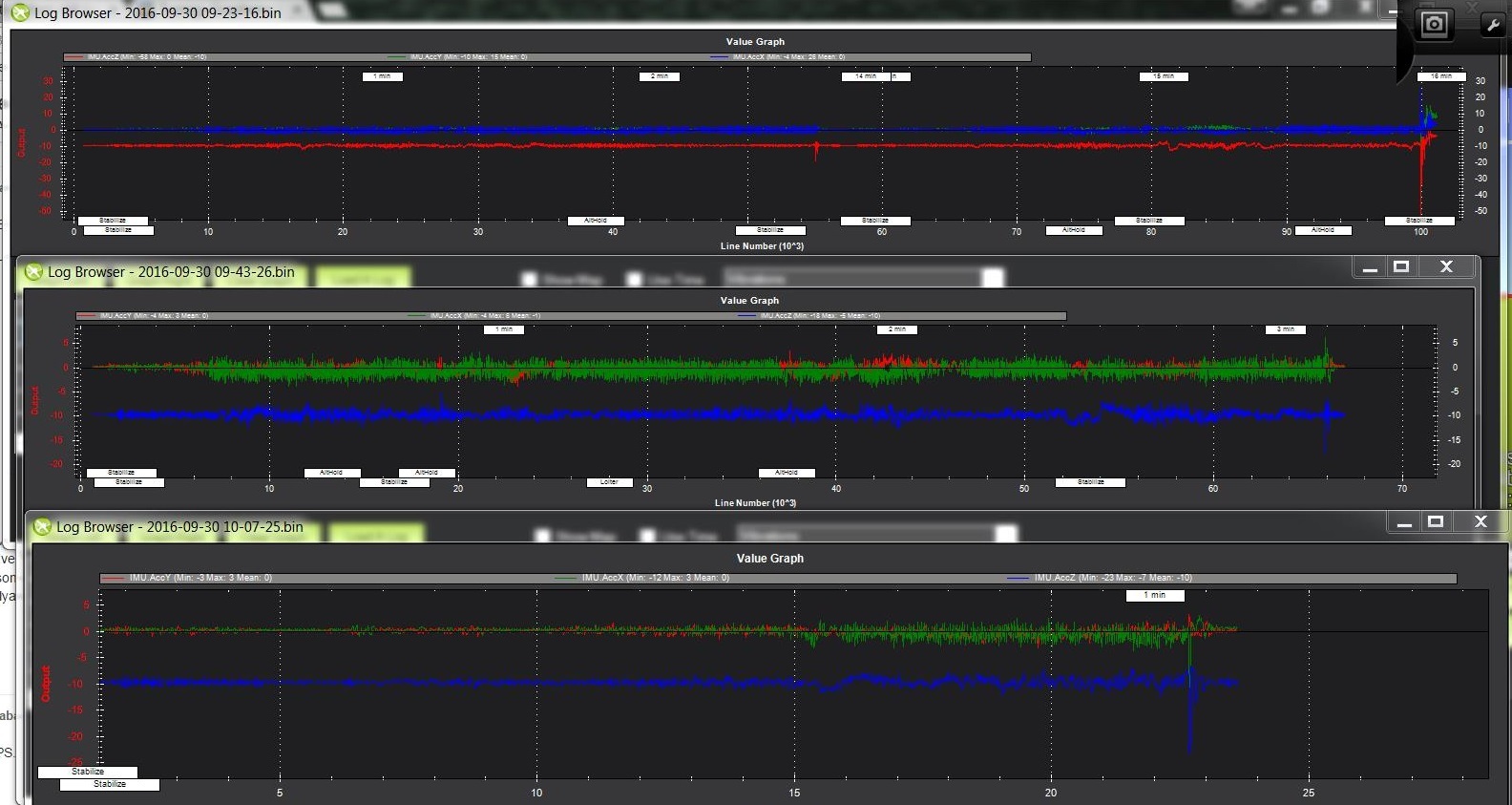
And this is from last flights
Are my vibrations that bad?
Only thing it can and does bouncing is bottom part of my craft where Retract legs,LiPos and gimbal/camera is mounted…part of the problem is i did all this Autotuning without payload instead of gimbal,and also the whole thing is to soft without it…i we fixed part of it to be more stiff,and also there is no difference when legs are open…
Here we maybe have harmonics bcs. everything is mounted on rubbers,tube to the frame and again tube to the legs…Vibrations is somewhere here…still thinking how to solve this…also,next autotune try will must be with payload this results worth almost nothing
Believe me i studied vibrations on my Y6 a lot… thank you for your effort…
not that bad, but i’ve never seen an X and Y axis quite the same as Z. In every log I remember they are less than Z. That, for me is unique. It could be the mast, or harmonics in dampening.
With the parts you have it should be less that 10. I’m saying because I own the same dampener. For sure it will not hurt. I think it is worth it the try
I really think my problem lay somewhere in throttle region…my problems always start with alt hold…
…and thru all this autotuning i didn’t have any problem with that until only one day when i try mot hov learn,since than i turned that off and checking after every flight …
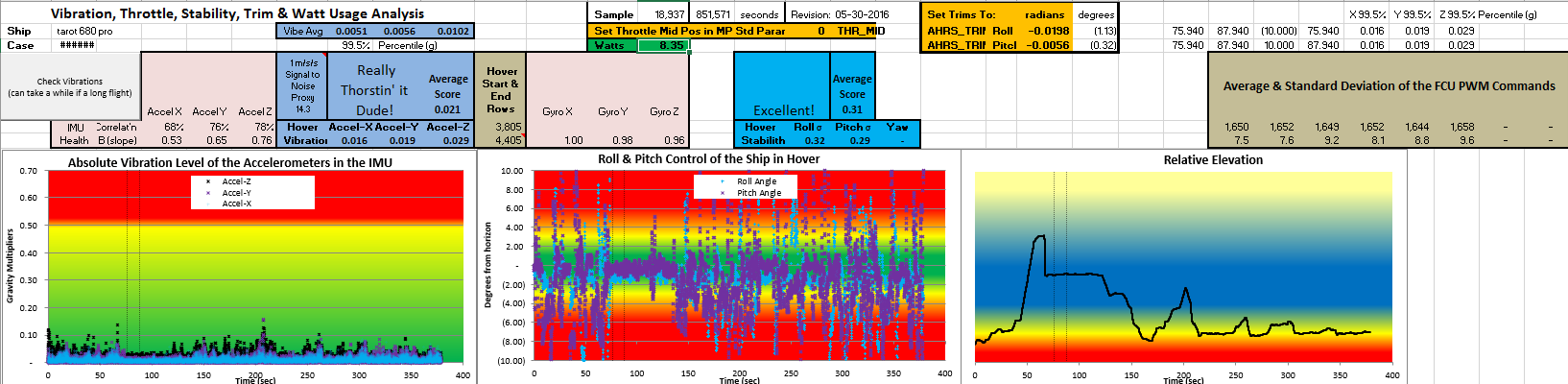
First of all,from my last logs it becomes that my Y6 hoover at 31%…that’s a bit strange,flight before ,nothing changed was on 34% and few flights ago PIDS different at 41%…automatic learn of throttle.mid is OFF, because if you read thru my blog i already had problems with that in some of 3.4rc editions before…before this autotune adventure,i don’t remember my copter was ever under 40% in hover
I did change some of my ESC(Plush 40A with BLHeli)settings but that was before all this tuning, which might affect power,but hoover at 31%,i don’t think so
Also i would really like to know how solid is your real experience and knowledge about BLHeli settings and what it does… especially with my unusual setup(lover voltage,bigger props)…bla…blla.i we studied BLHeli a lot too…sometimes higher mot timing is only solution…
Also,do you understand my copter disarm/arm few times in the air… and there is no evidence of that in logs,i only heard voice from ground station,and also later watching terrible video from my fpv camera(go pro) .
Video is also on dropbox but i was limited on field and used some software from web to cut it…
When I have time,will give MOT_HOVER_LEARN another try…it’s not easy to test big copter in big city…
I really need Leonard T and Randy(away til sometimes octobre) to take a better look at my logs.
Hello Emin, I own a few sets from 330Kv to 2300 and was able to get rid of all my descync problems when I started to use BLheli in 2014. What I learn is that the best is to test mainly the demag and timing on the bench and make sure what is really best for you. I’m not an expert, for sure, but maybe I can help , or you could also post on its rcgroup page which is very active.
I’m not sure about the disarm issue. That should be analysed by the devs.
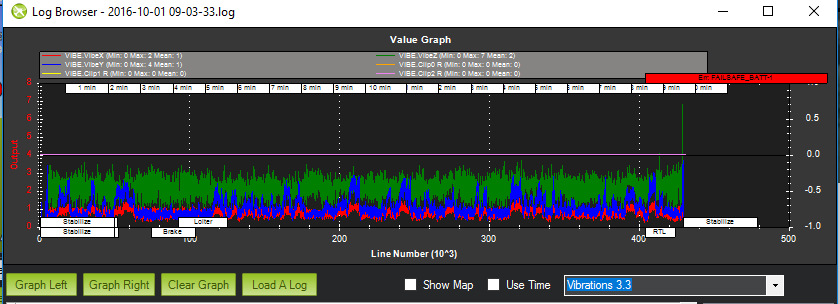
Regarding vibrations, for 3.4r series you should analyse the virbation3.3 graph which uses an algorythm more close to what matters to ekf. I do understand your considerations about the play, but I have never had any problems with wind etc. and my vibes are really low. I will post a few pictures of my hexa in a few moments.
For sure Randy or Leonard would have an assertive word about what could be wrong, but that is my guest.
Just look at my build and see, my vibrations is about 1/10 of yours. No issue at all with my bird.
tarot 680 hexa
quanum 3508/700Kb
multistar 13x4.7 wooden prop
2x10ah 4s multistar or 1x 16ah lihv 4s multistar battery
HK 30A blue series with latest blheli ( 16.7 ) - medium timing, dampening light enabled, low demag
HK pixhawk - 3d printer dampening solution, using open source project from GuyMcCaldin
Tarot retractile landing gear
ez4 matibox sonar
Tarot t4-3d gimbal with gopro cam
2w HK fpv transmitter
frsky radio
Original 3dr gps
Original 3dr power module
Original 3dr telemetry
auw - 4.1KG
thank you for comment Fernando…how did u get first graph?
Inspecting my parameters i found weird stuff
RC1_TRIM 1500
RC2_TRIM 1505 RC3_TRIM 997
RC4_TRIM 1501
WHAT IS…
RC3_TRIM: RC trim PWM
Note: This parameter is for advanced users
RC trim (neutral) PWM pulse width. Typically 1000 is lower limit, 1500 is neutral and 2000 is upper limit.
Range Increment Units
800 - 2200 1 pwm
i will reset RC3 to1500
its raining outside anyway
Rc3 trim is throttle trim so it is normal to have it low - that is the value that MP sets when you do the radio calibration routine. For rc5 , rc7 and rc8 I’m not sure if they are really used anyway. But rc6 min/max is used to do manual pid tunning using rc transmitter knob, Your settings looks good to me.
I’m looking deep at your parameters to look for something that could be related to throttle. Your mot_thrst_expo is 0.5. Have you measured it? If not, i would suggest that you stick with the defaul value of .65. I’ve measured mine recently and got a value pretty close to the default.
Your mot_spin_min and mot_spín_arm are close to each other and it seems that it could be a little less. The last suggestion from the devs are to get them as low as possible to allow room for AC to work nicely. This behavior has changed noticeable since 3.3. What I did was to measure the point that the motor started to run without twitching ( 0.035 ) for mot_spin_arm and a point that the motor started to produce any throttle ( 50 grams - close to 0.1 ) for mot_spin_min. I got weird results with altitude hold mode when mine mot_spin_min was 0.2.
I couldn’t find any other setting that could explain that, nothing seems wrong to me at all.
I keep believing that the issue is vibration related.
SOLVED…RC3_TRIM IS PARAMETER SAVED BY RADIO CALIBRATION ANYWAY
i did radio calibration again…set to back 997…
MOT_THST_EXPO 0.65
ok,set…0.65 but i am not sure i understand that…why do i need to calibrate that,isnt that how quick throttle will,if it’s bigger response around middle will be slower…correct? react around stick…i dont understand your blog about autocalibration of that…
After calculation of MOT_SPIN_MIN/ARM as per instructions here; http://ardupilot.org/copter/docs/set-motor-range.html
MOT_SPIN_ARM 0.097
MOT_SPIN_MIN 0.127
Thanks Tabascoz
i did ESC Calibration again…no OneShot,set to normal(0)
Motor timing set to Medium
…except above comments(SOLVED) I also i removed PROBLEMATIC RETRACT GEAR in terms of vibration
Instead i mount 3 separate legs on each of the arm,i had them from before…they also have RC Car suspension inside…no more flip off on landing…i can drop Y6 from 1m like nothing,dead still…
also used stiffer/shorter antivibration mounts…
also now i have more place for LiPos(can mount 4x10Ah easy) so i can test longer and also with payload…
Hey man, that looks pretty awesome. How’s it flying now?
Also, you mentioned your landing gear having suspension. I keep “bouncing” based on the stiffness of my “feet”. Where is the suspension, is it in the body at the mount point or inside the second tube? Are you suing just springs or is there a kit?
Looking to go to a tripod myself, hopefully save me from having to keep replacing landing gear mounts on hard landings
I very strongly agree with @tabascoz advice to remove the extra vibration mount. Also switch back to a simpler GPS mount which is just 10~15cm and directly mounted to the frame. It looks a bit over-engineered to me actually.
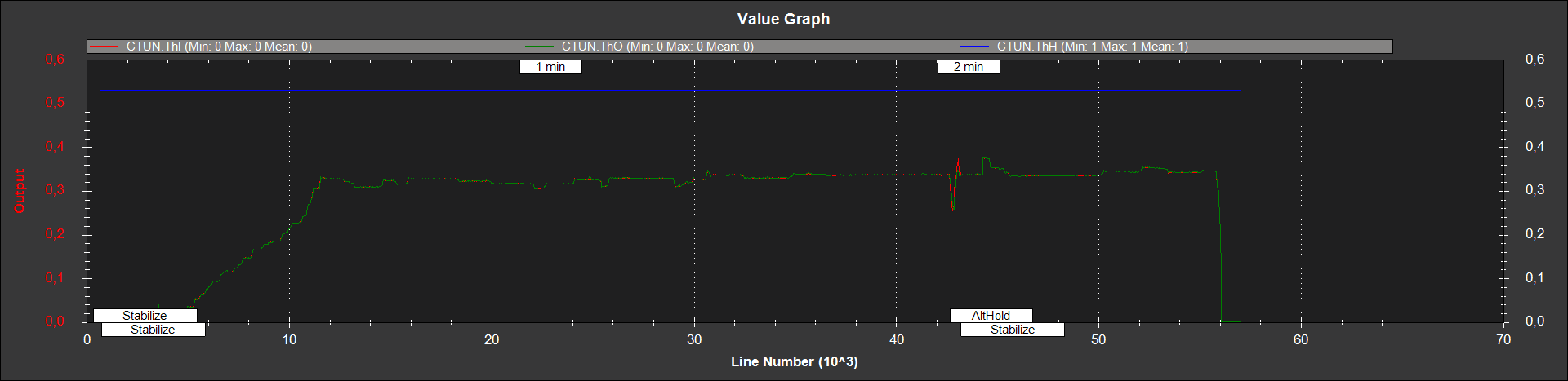
I was hoping that will help with my problems about throttle an AltHold…
Before flight i set MOT_THST_HOVER at 0.53 bcs.that is somehow realistic for added 1,65 kg dummy weight from 0.34 previous flights showed…
During stable hoover everything seems fine about throttle but when i switch to Alt hold…Y6 start to drop…throttle is to low…
Regarding problems before ThIn and ThOut are ok now
The low hover-throttle values has come up a few times. So far there’s no real evidence that it’s incorrect so I think you should just set the MOT_THST_HOVER to about 0.32.
One thing to remember is that the value is a “thrust” value not an ESC output. By default, the thrust -> ESC output is not linear although it can be made linear by setting MOT_THST_EXPO to zero. Most ESCs are not linear though, the curve gets steeper in the upper part of the range (i.e. a single pwm increase actually increases the thrust output twice as much at the high end of the range as it does at the low end).

 I would try to lover it to something below 10 , which I presume it is very easy with you HW, than redo everything from default ( or a flyable manual tune ) pids, including autotune.
I would try to lover it to something below 10 , which I presume it is very easy with you HW, than redo everything from default ( or a flyable manual tune ) pids, including autotune.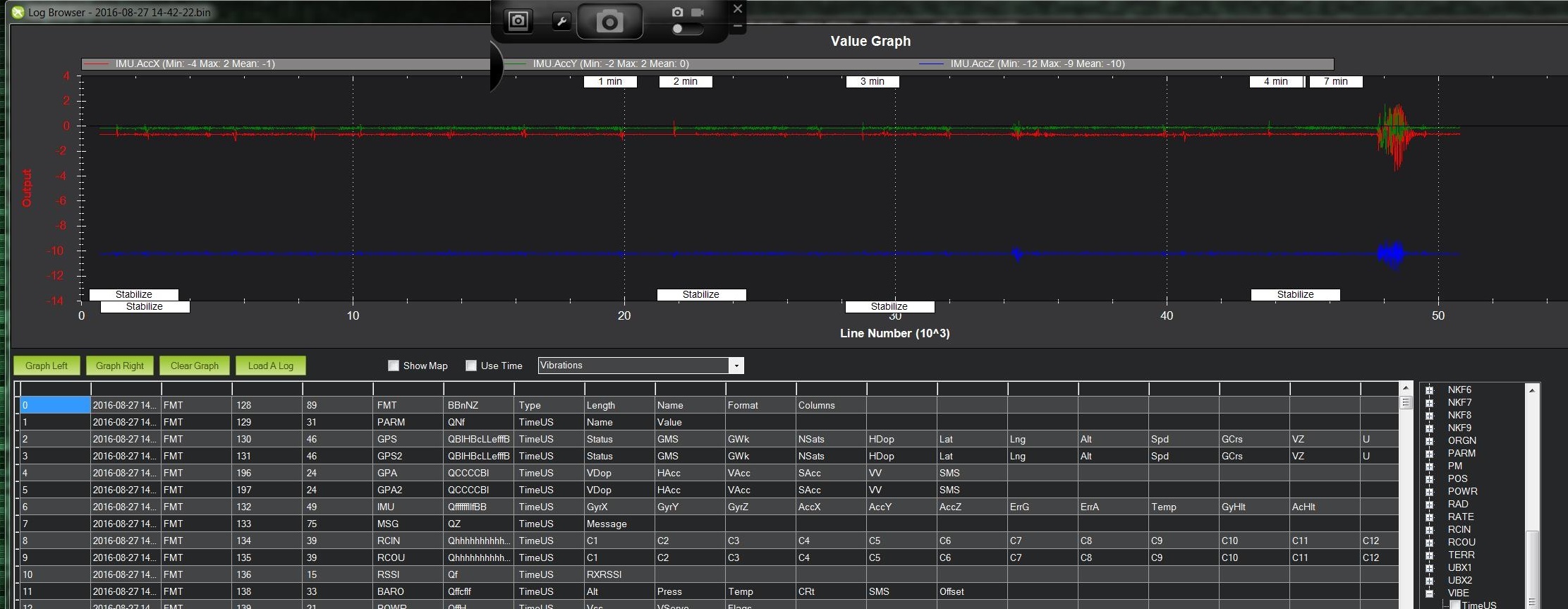
 thank you for your effort…
thank you for your effort…