Hi guys!
I have a problem with Yaw and too low Rate D (Roll and Pitch).
Frame : Octo quad X8 (My design)

Motors: T-motor u8II 150KV (12S)
ESC: T-motor ALPHA 60A 12S V1.2
Prop: T-motor Polish 22 inch
Battery : 12S
Flight controller: Pixhawk Cube Orange
Dimensions: 1096mm motor to motor
Firmware: ArduCopter 4.1.1 (Tried 3.9, 4.0, 4.07)
Current Sensor: Mauch PL-200
Take-off weight: 13,5 Kg
Test: PosHold hover, Test Yaw, Test Roll, Test Pitch, Test Thottle by 1 minute.
Test video: Test Heavy Octo Quad X8 - YouTube
Test log: https://drive.google.com/file/d/1nlj-yTfOgjI_Nr5aNTX7mTvnrU2Xsl6c/view?usp=sharing
Param: https://drive.google.com/file/d/1iPJvgDBCyl3kJJPcIePH9D11q9JNYBNY/view?usp=sharing
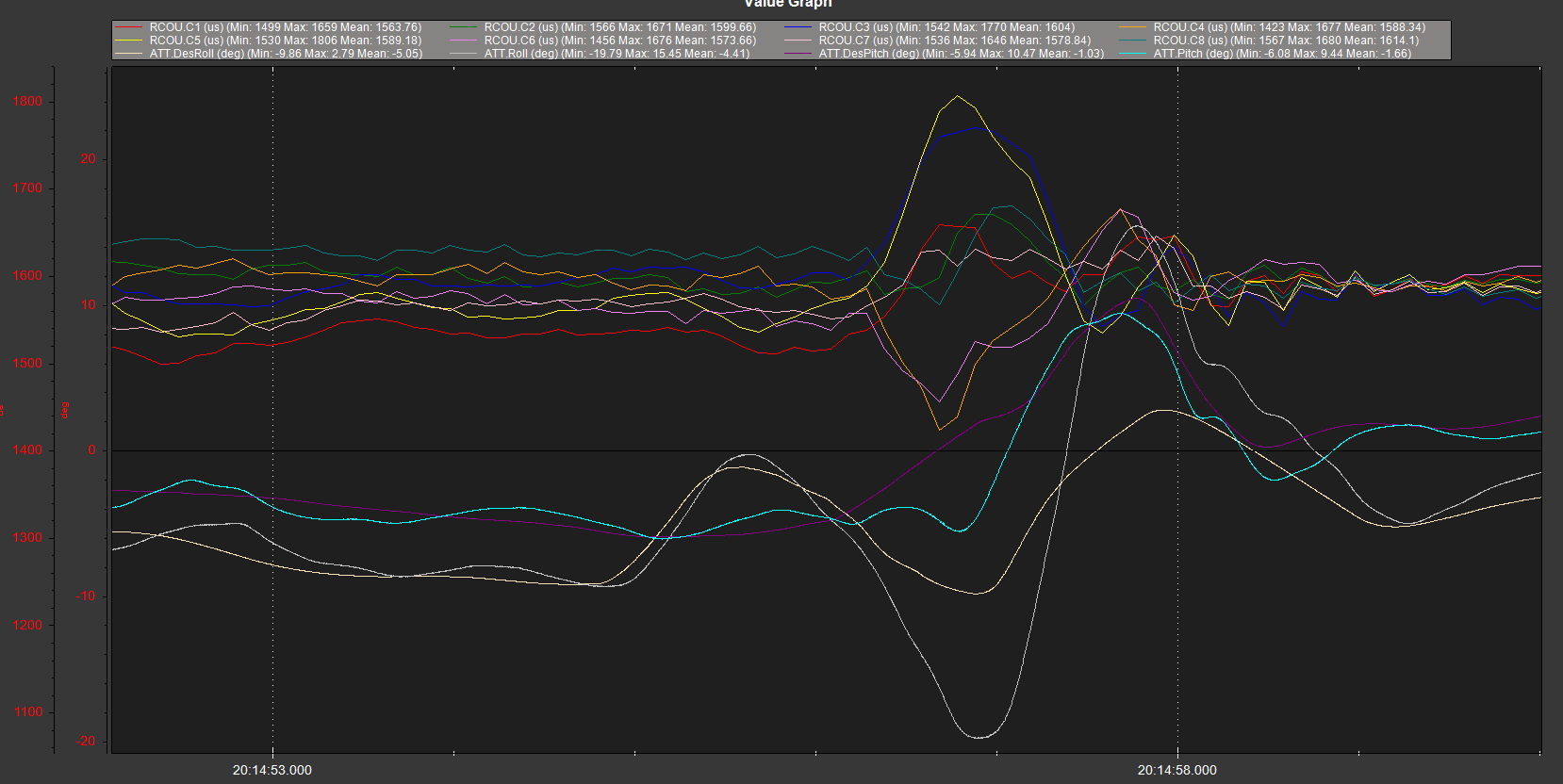
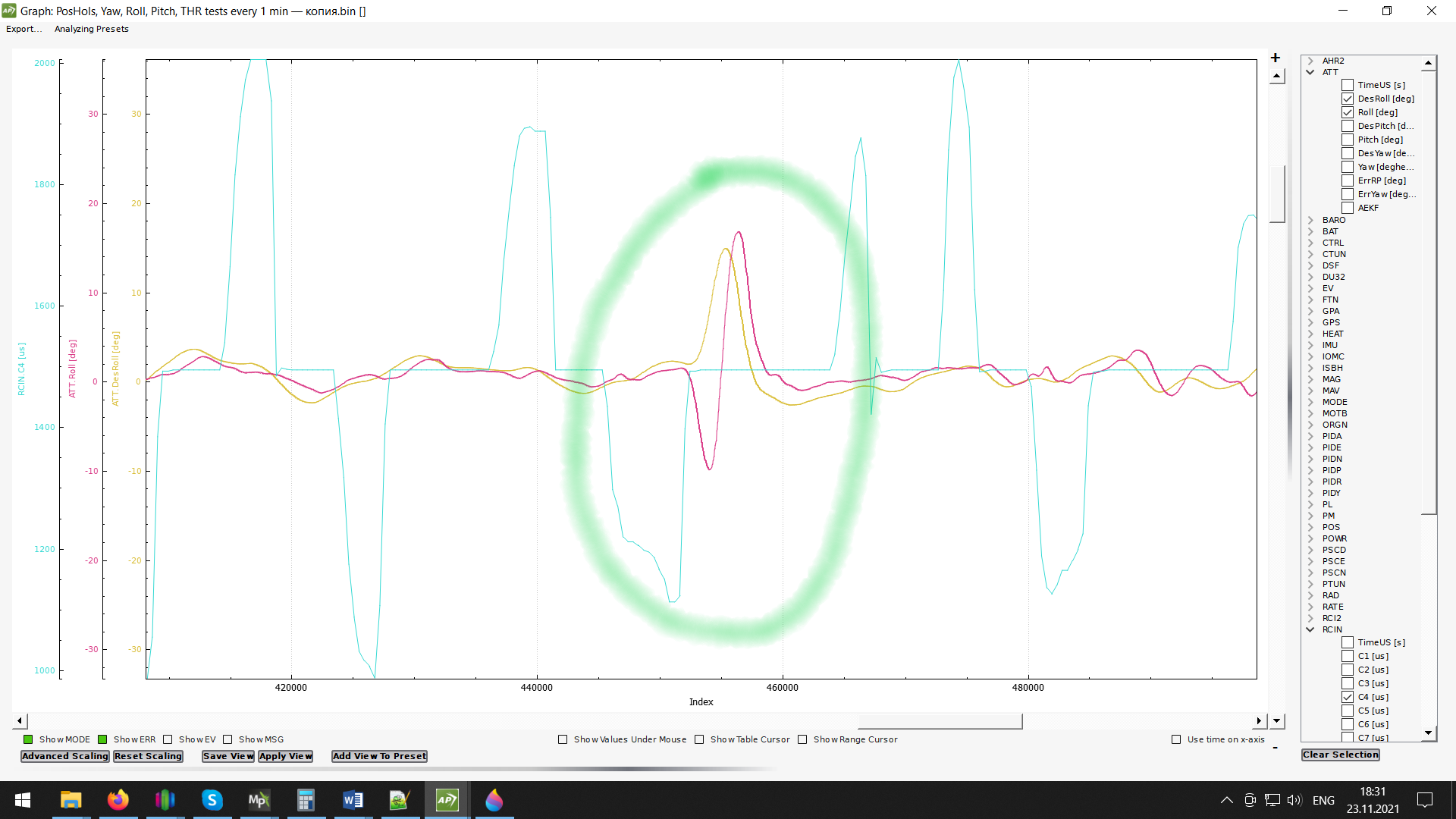
Problem on video YAW test: 1min 39 sec
Problem on Log:

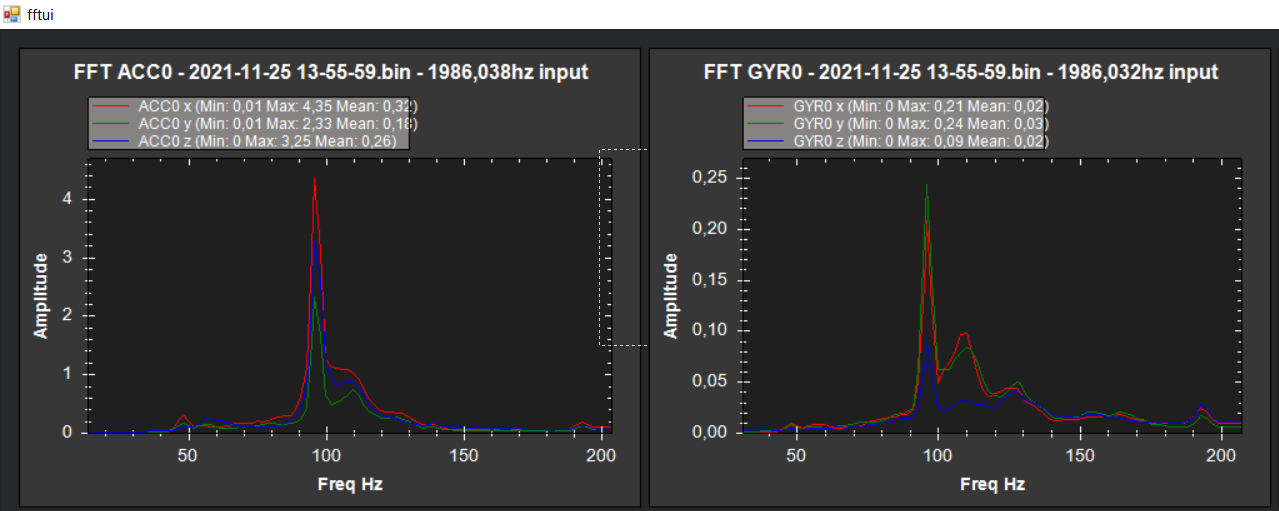
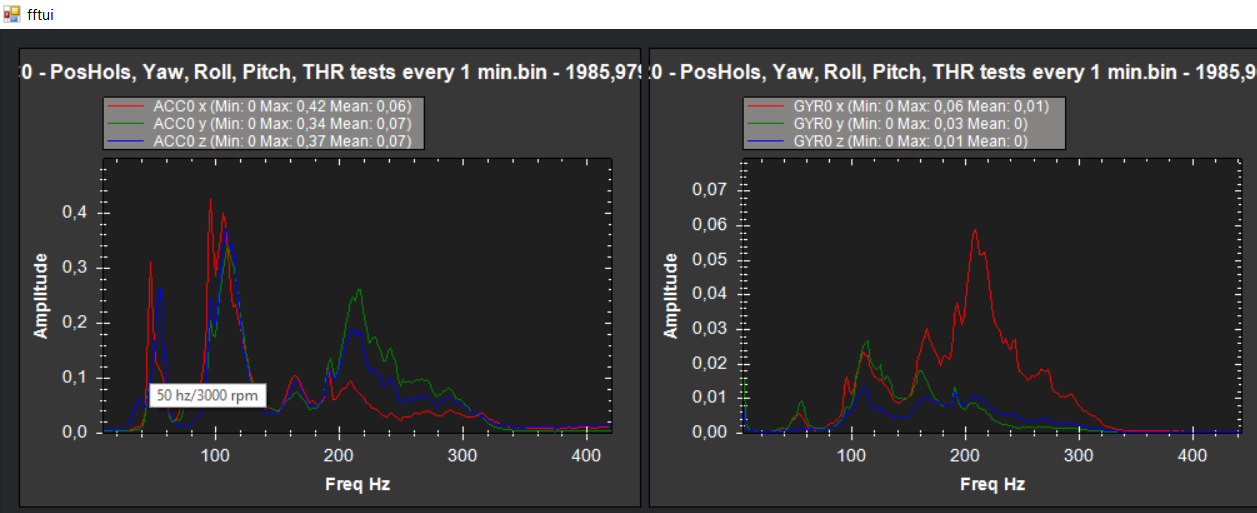
Gyro Noise I think normal.
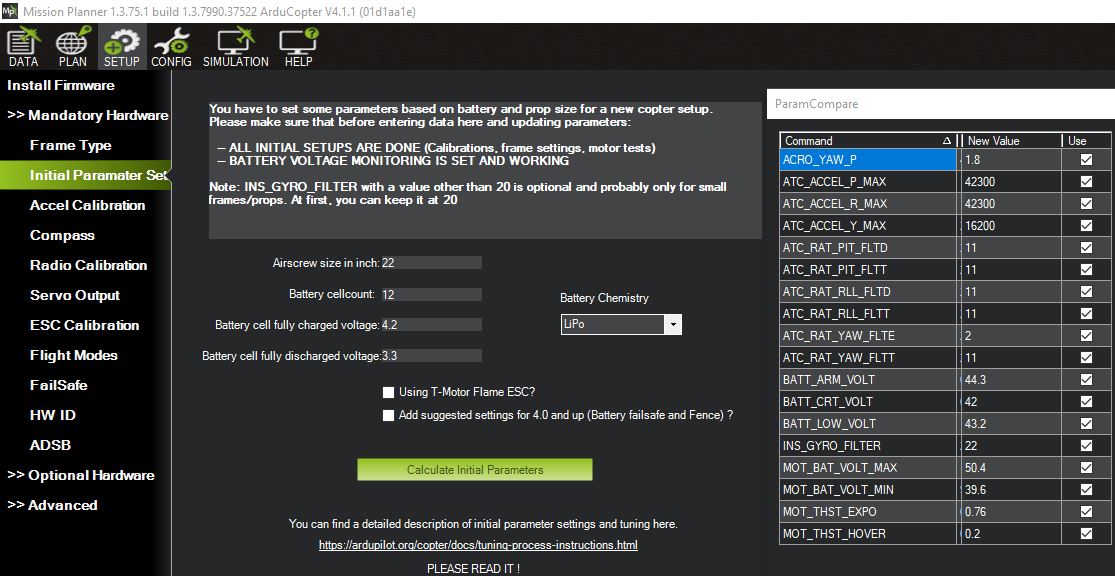
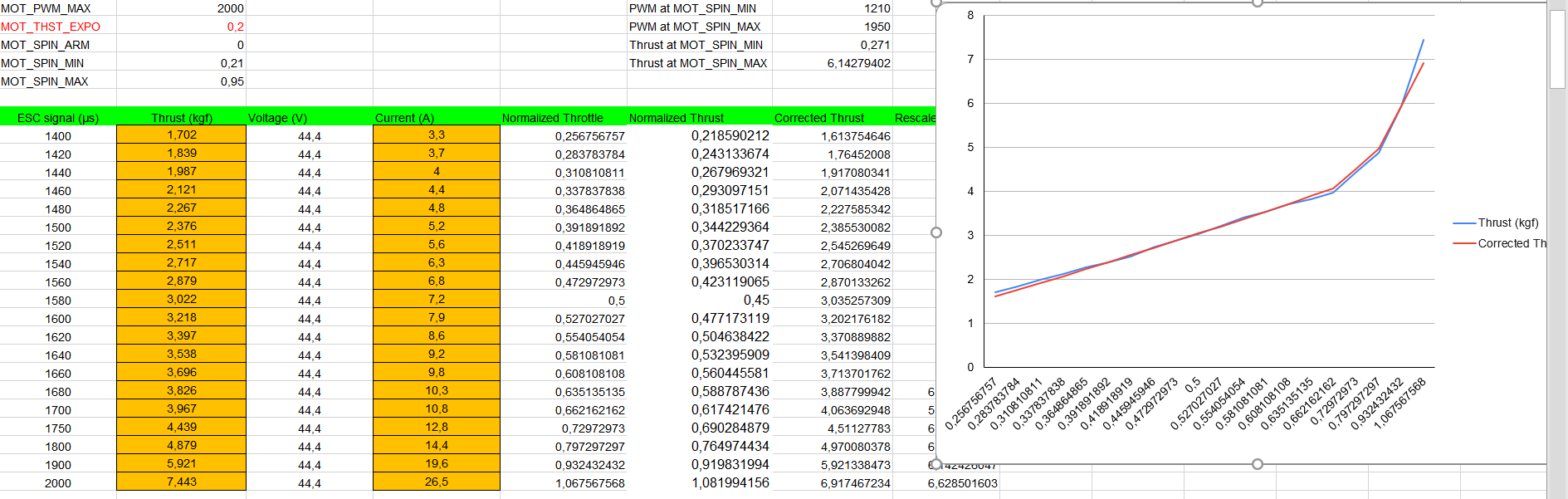
Throttle Hover (ThO) from log 0,4 (RPM t-motor list is 2925), 48,75 Hz
MOT_THST_EXPO 0,2 (from motor thrust scaling table and t-motor list)
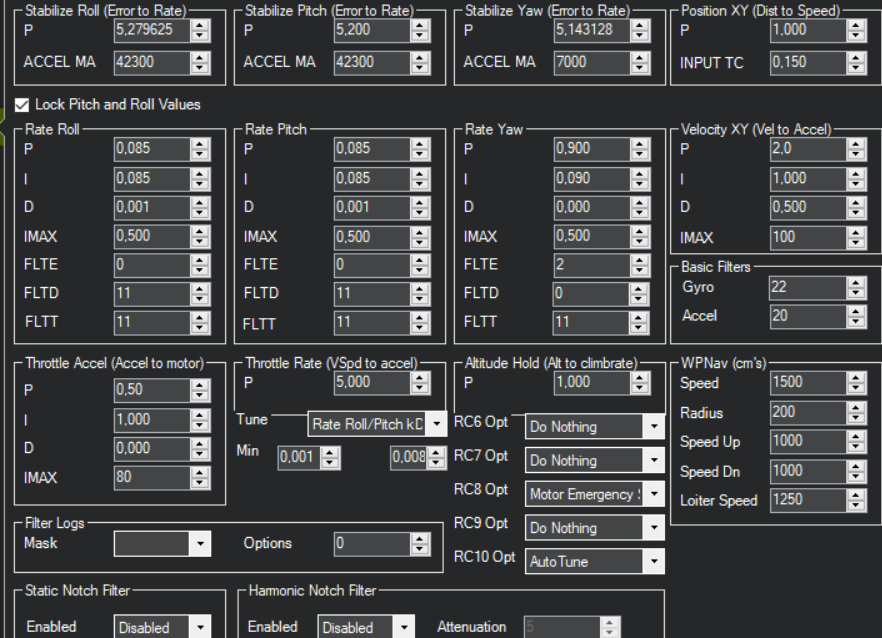
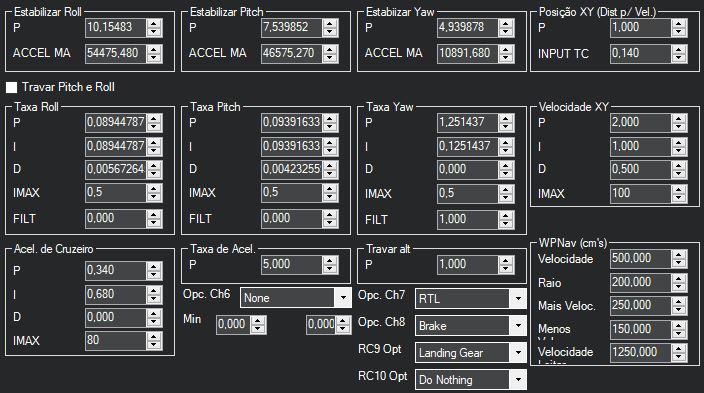
Extended Tuning:
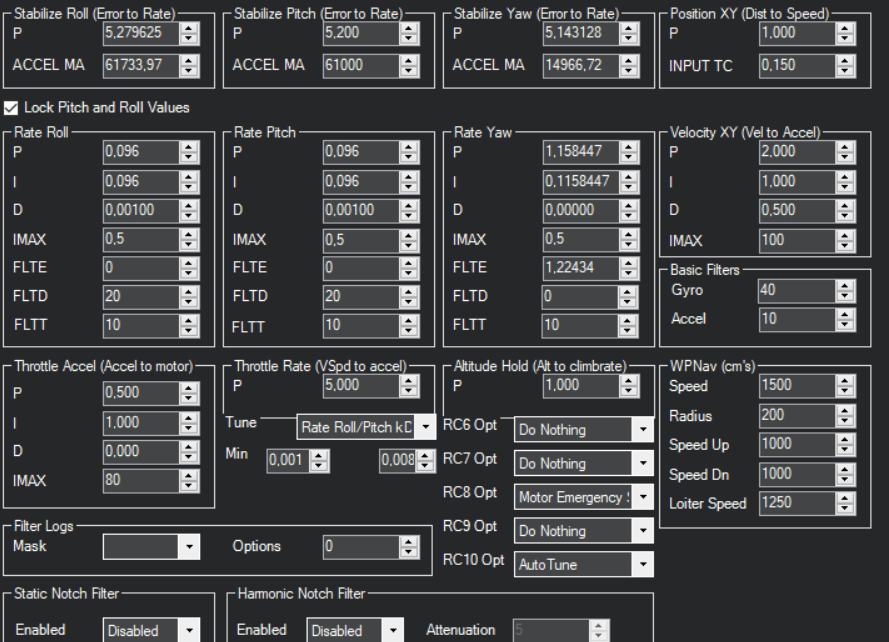
INS_ACCEL_FILTER,10
INS_GYRO_FILTER 40
I tried with INS_GYRO_FILTER 20 and 30, but with 40 is better.
Tried Autotune and manual setting PIDs.
If I increase D Pitch/Roll appear Oscillations (0.002 for example)
If I increase P Pitch/Roll appear Oscillations (0.12 for example)
I know that Rate Yaw P too high, but I tried with 0,4 - 0,8 manual, autotune 1,15 is better.
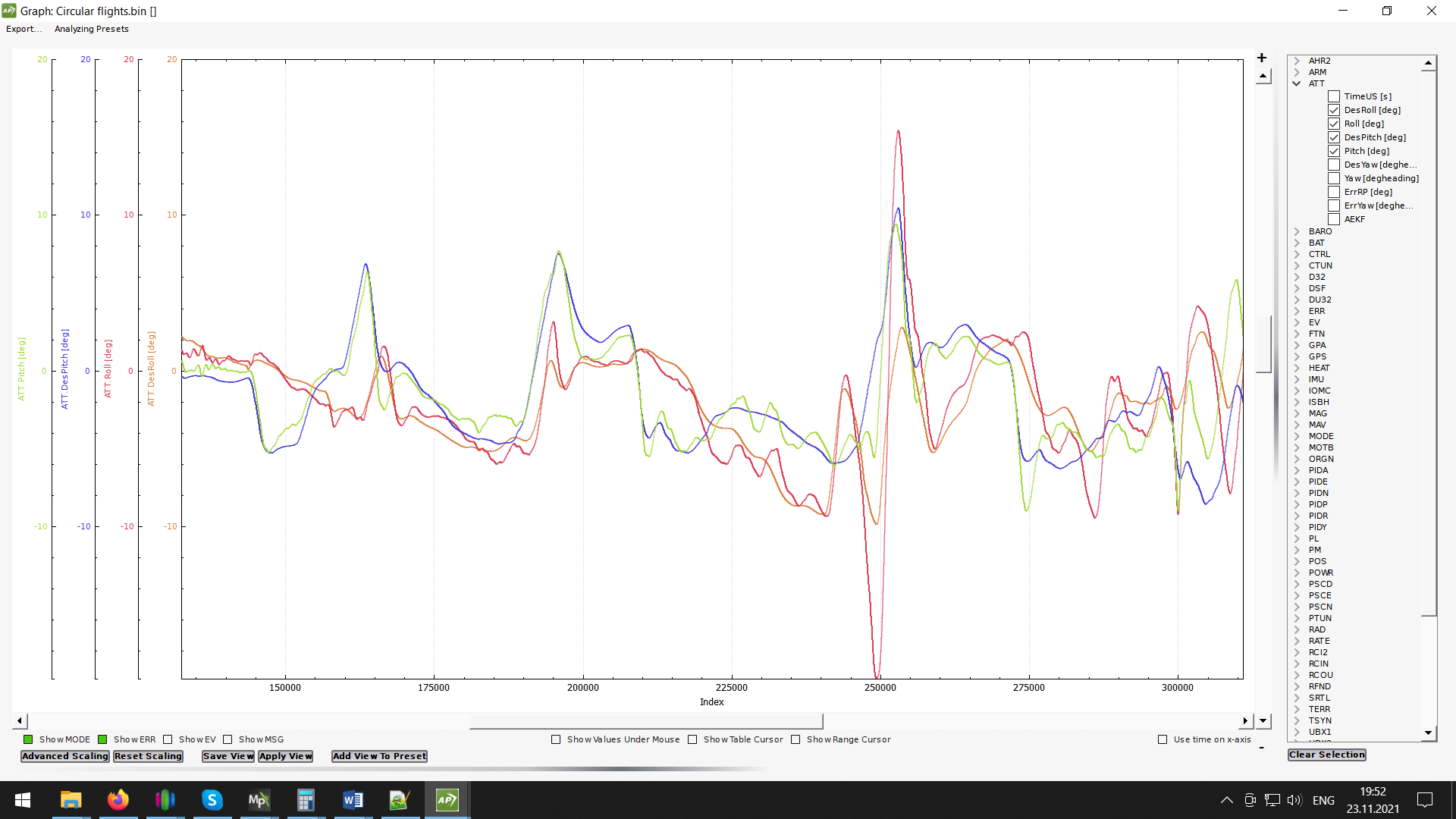
One more log with circular flight: https://drive.google.com/file/d/1skDlCVRwNPDscTwLHHFb0o9n6ozSH3LR/view?usp=sharing
Video: Circular flight Octo X8 - YouTube
Thank you in advance for your help!