Hello everyone.
I have a problem about climbing to waypoint altitude.
frame : Octoquad
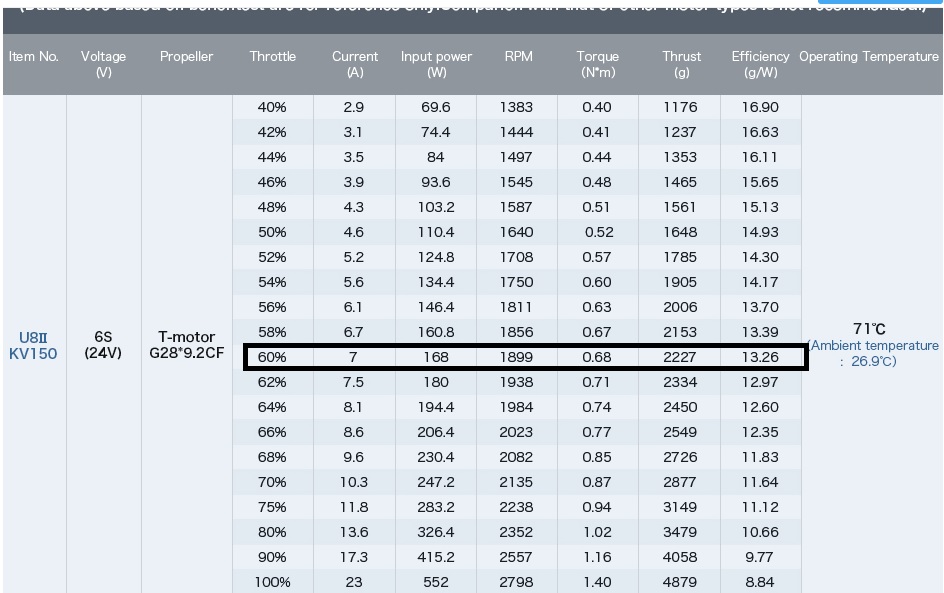
motors: T-motor u8ii 150kv
ESC: T-motor alpha 60A LV
prop: 28 inch
battery : 22000mah 25C x 2(Parallel) (6S)
pixhawk : CUBE
Drone total weight with payload : 18Kg
Hover current : 80 - 90 ampers
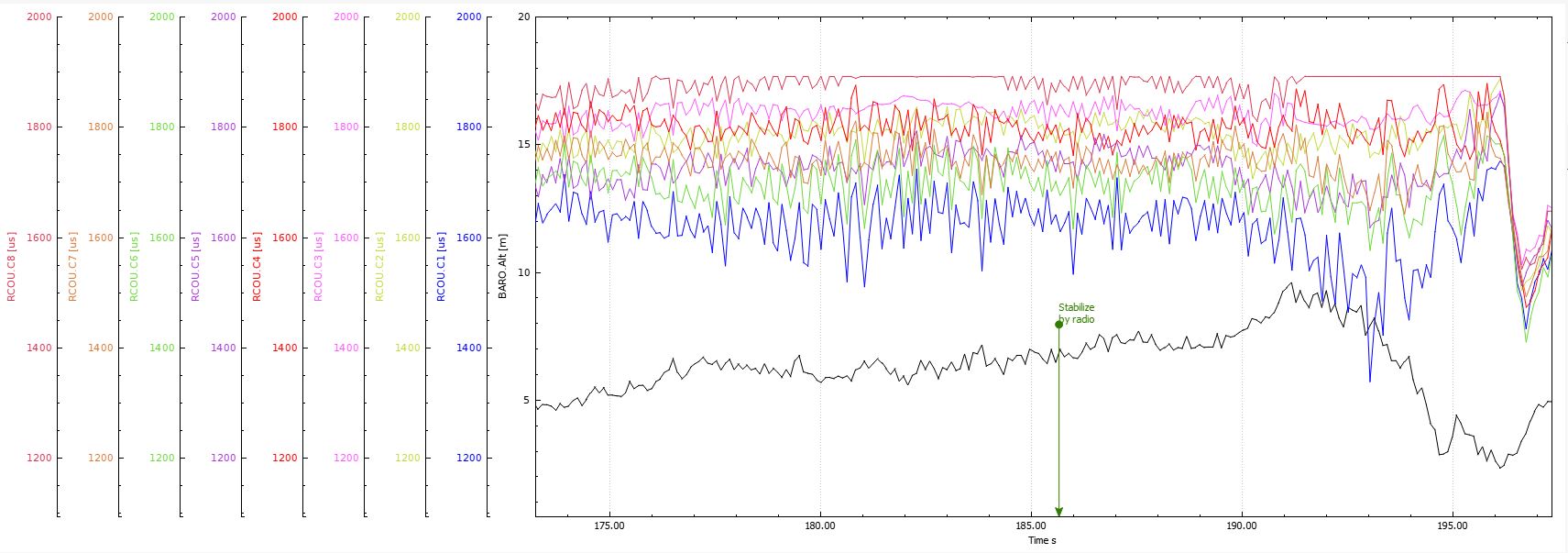
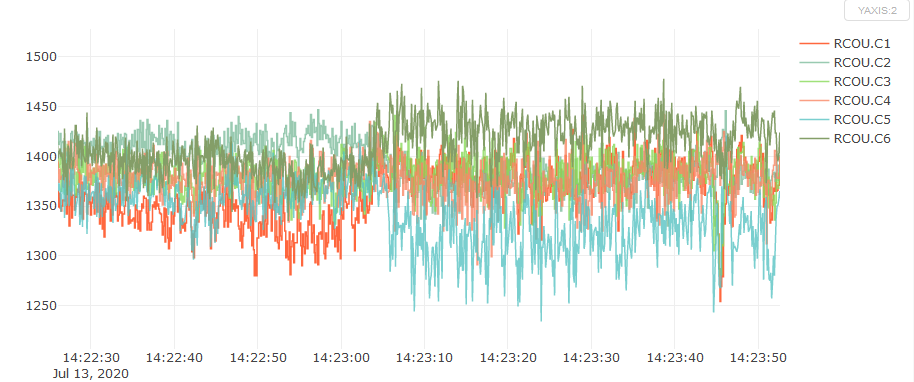
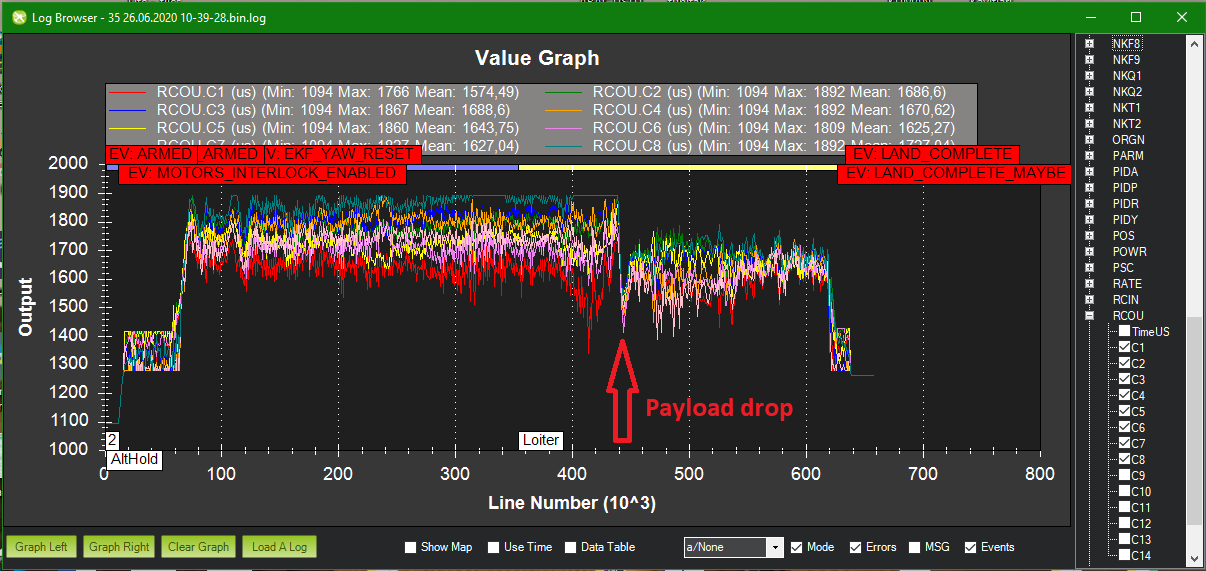
I can takeoff with ALTHOLD mode and i fly to auto climbing point manually but when i started a mission at this point to 150 meters altitude, the OCTO the starts to descend suddenly. finally I hit to ground. Also I started RTL in another flight but drone hit to ground very fast.
I tried this test three times but same problem happened.
I tuned drone with autotuning PID succesfully no problem also my DESroll and roll logs is good.
I have no problem about GPS jamming and Baro altitude.
I checked all cables and batteries no problem no heating after flight.
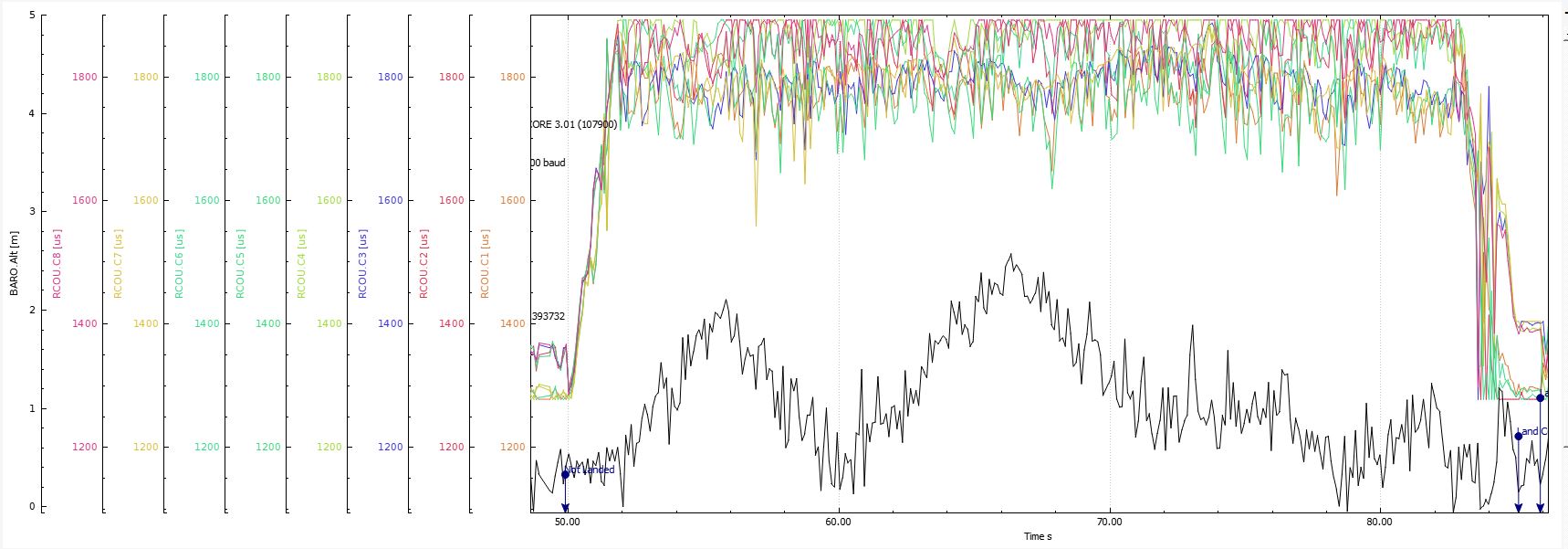
here is log:
log
Waiting yours helping
thank you so much …