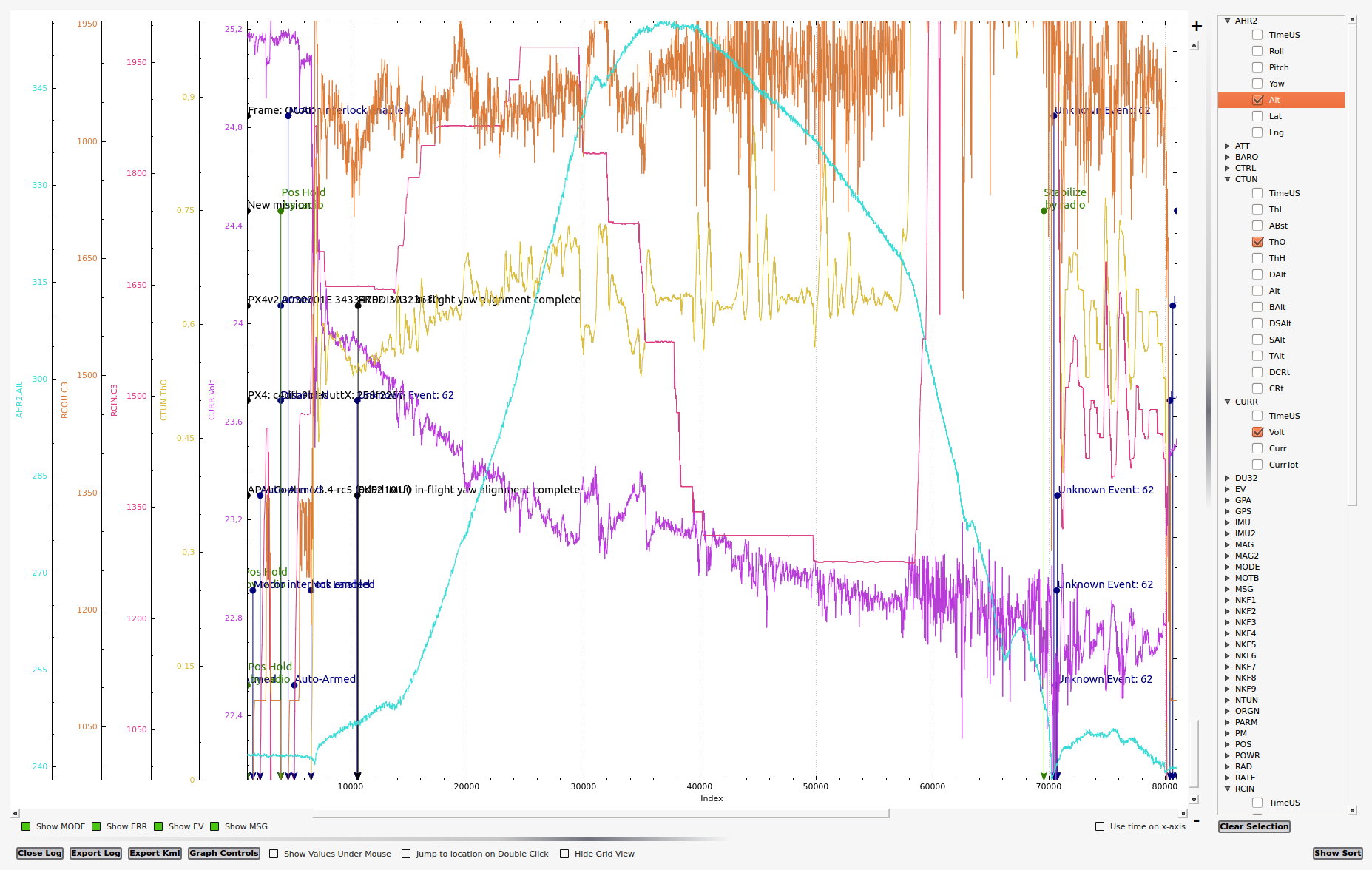
Appears to start at entry 57,723 in the log. Very fast descent with no throttle control in POSHOLD. RC IN on channel 3 appears to be at maximum. Roll/Pitch/Yaw responsive. Switched to stabilize to regain control during last minute of flight but still unable to increase altitude with maximum throttle. Auto analysis indicates motor imbalance but considering the very fast descent and loss of control I am not sure this is relevant. BARO.alt appears consistent with flight.
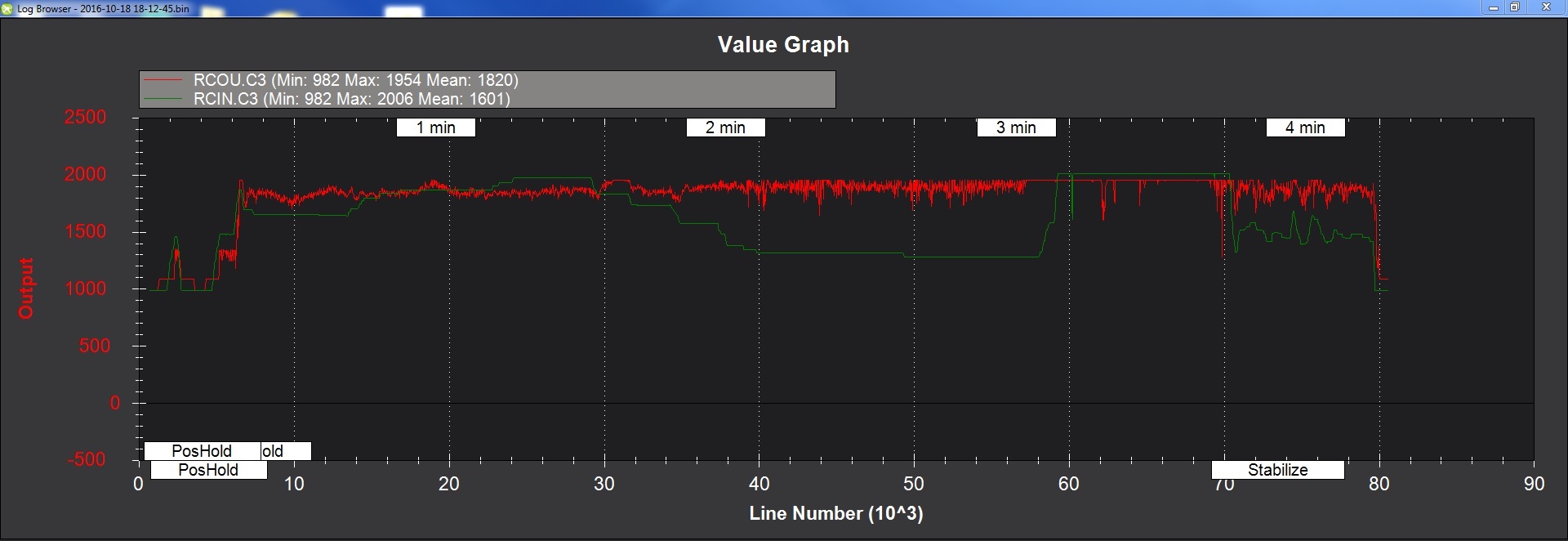
Are you looking at RCOU, C3 in the logs? I wasn’t sure if that was the “requested” output for motor 3 or not. RCIN has C3 pegged as well, but I thought RCIN corresponded to channels from the transmitter, i.e. channel three for throttle. Since I had throttle pegged during the descent I wasn’t sure.
14x5.0 FoxTech Supreme props which are recommended for these motors. Fly’s great with plenty of power and agility. 850g is about 50% for these motors. AUW is right at 3.5Kg. I am at a loss as well.
Hi Rich,
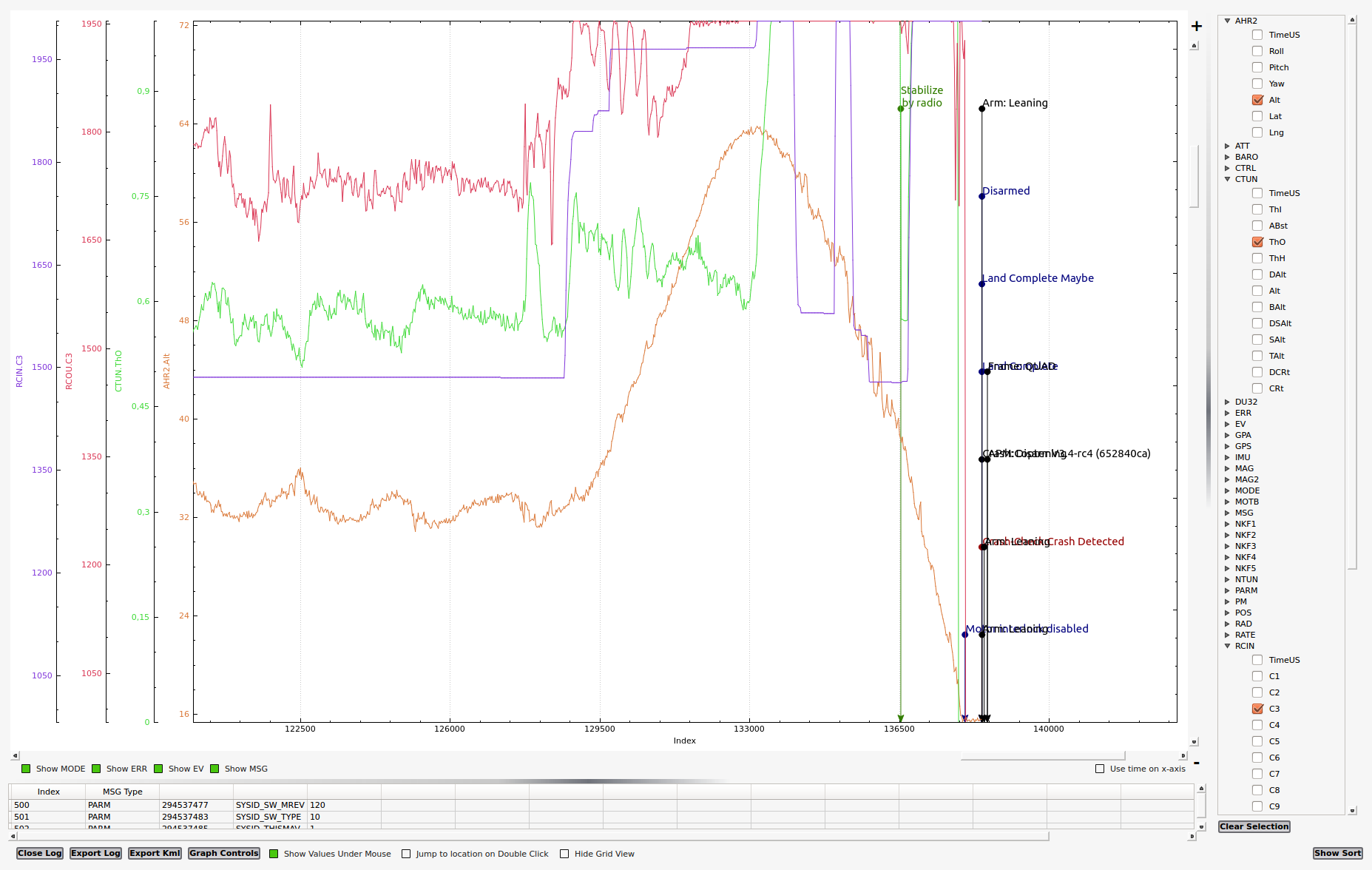
noticed this behavior with my new build Q450 quad with bbbmini some weeks ago. You can see at the time when the loss of altitude starts and RC3 (in) try to stop the decent, that CTUN.ThO go to 1 and that motor 3 is also at maximum power nearly the hole decent. It seems that your copter has not enough power. I fixed that with switching from 3S to 4S battery for my Q450. When there is another reason for that behavior, that will be good to know.
Wow, this just like my situation but I am already running 6S, Were you running an X or Spider X configuration?
During normal flight it appears to have plenty of power, especially in stabilize mode. To confirm - RCOU C3 is requested output for motor 3? My charts attached.
I am running X configuration. RCOUT C3 is motor 3 output. My picture above is from your log file. But I attached a picture from my Q450 log file with the same issue to this post. For me it seems that the copter has not enough power.
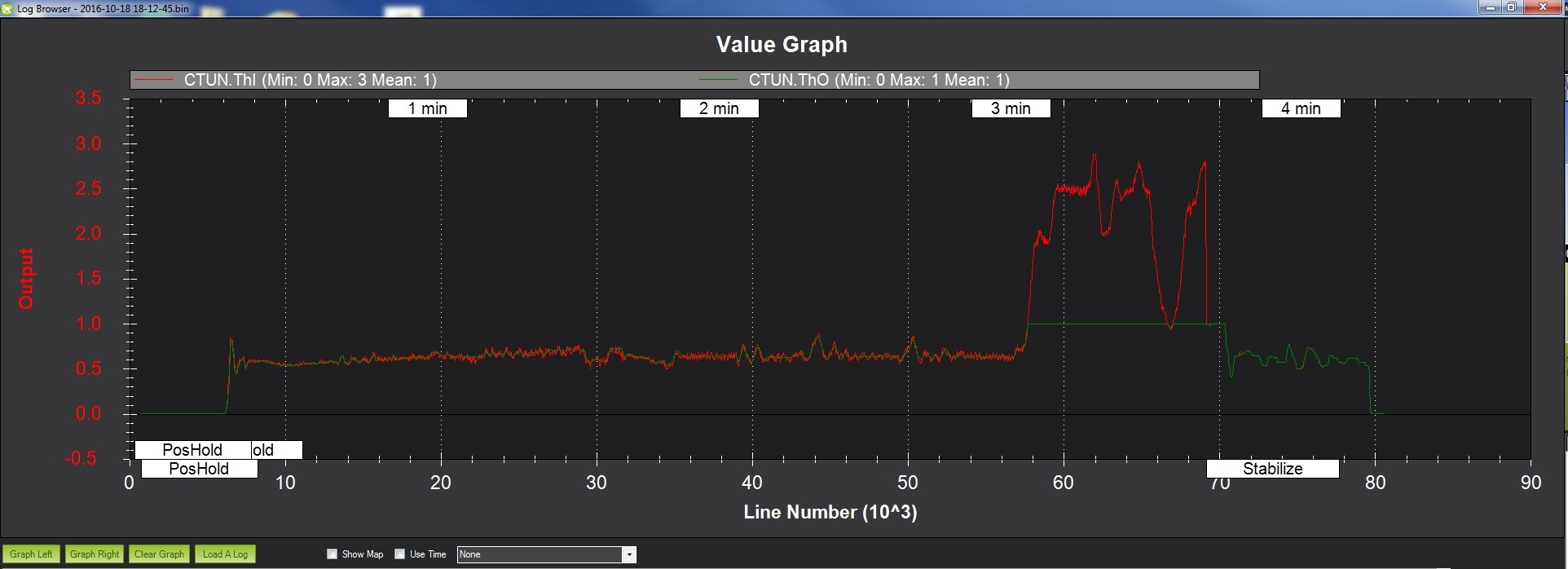
Thanks Mirko, didn’t catch that at first. I wonder why CTUN.ThO would bottom out at 1000 for the same period of time? That suggests to me that the flight controller deliberately cut throttle to all motors. The quad remains upright during the rapid descent and maintains maneuverability - but hits really hard when it lands. I would think that a motor failure on C3 would result in a death spiral or flip of death.
The weather is pretty rotten this afternoon but will try to get a video demonstrating lift and maneuverability. It really flys like a bat out of hell with motors easily rated for the AUW. I also didn’t see any power issues when looking at the logs. Thanks for taking the time to look at the logs!
I’ve had this problem when carrying high payloads where there wasn’t enough PWM buffer to both control attitude and altitude because one motor (for whatever reason - could be wind) was near its top PWM output.
What I’ve done for those instances is lowered the ATC_THR_MIX_MAX to prioritize altitude over attitude. I usually have it set higher than the default with a preference for attitude, since loss of attitude control pretty much means the vehicle is coming down. But in the case where there’s not a lot of PWM buffer, I lower that parameter, and that has eliminated the issue entirely for me.
Thank you sir! So, the drop in throttle response to 1000 (CTUN.ThO) occurs at the same time that RCOUT C-3 has requested output at the top of its PWM range. I will admit I do not understand how the PWM buffering works. I now suspect that motor 3 - (front left) has issues and that contributes to the problem. Now that you mention it, I seem to remember comments on other threads where rmackay9 talked about possibly changing the defaults to favor altitude - which makes much more sense to me as keeping the aircraft in the air, even if stick response is sluggish would be my priority.
By all accounts I should have no problems with lift as my AUW is at the midpoint for these motors. The craft remains maneuverable right until it bounces on the ground with battery and gimbal flying off!
I’m not so knowledgeable in this area so I’ve asked Randy about it. My question was if CTUN.ThI should also be in the 0-1 range and his answer is:
in general yes. I think it can actually be higher or lower but it gets constrained at some point inside the attitude control library.
I think it needs to be allowed to be higher or lower because it’s later filtered (in the motors library I think)… and that filter will never actually get to 0 or 1.0 unless the throttle is allowed to go higher than 1.0 and lower than 0.0
So the answer to your question is: generally CTUN.ThI should also stay between 0-1, but it can grow. ThO comes directly from the motors library so I believe it will always be limited in the 0-1 range. So they don’t really diverge, they go in the same direction, but one is limited and the other is not “hard-limited”.
Thanks to everyone for info and replies I have learned a lot through the process. While the motors should have plenty of power per the manufacturers documentation, and although my experience flying the aircraft is very satisfactory, the log data points to an under powered aircraft and I don’t want to risk another very hard landing. The replacement motors are capable of 3 KG each while adding only 100G per motor. If the problem persists I know I will have to look elsewhere.
As an aside, the only way I could make the new motors work properly was to lower my motor rate to 50 hz from 490 hz. These are HobbyWing XRotor Pro 40A ESCs, and seemed to work fine with the FoxTech S3508 380 KV motors, but not the replacement 5008 motors.
I am revisiting this and taking a look to see if I am having PWM sync issues per your suggestion. I also want to try Roger’s suggestion regarding ATC_THR_MIX_MAX. While testing replacement motors I was unable to get them working with rc_speed greater than 50hz on the replacment 330KV motors. I am also wondering if there is a correlation between the PWM buffering that Roger (FreeBirdFlight) mentions in his post and ESC refresh rate.
Not all brushless motors are the same.
Be wary of the internal designs of some, how many poles, timing requirements.
At present I am sticking to T-Motor ESC’s and Motors.
Also I noticed your props seem a bit small.
We are running 15x5 on 480kV motors with 6 and 7S with good results, hover at 50% (thereabouts), but the motors could easily handle 17".
I’d like to add as well that the multicopter isn’t going to fly well with a 50hz update rate. The response is just not going to be fast enough to keep it stable. At least, I’ve tested a Pixhawk in the past with an update rate way down at 50hz and it was very unstable.
That was as a last resort effort when nothing else would work with the temporary motors. With the same ESCs and motors on ac 3.2 I was able to run at 490hz. I currently have them set at 207hz and they work fine, but in actuality they flew pretty well at 50hz. My only issue with this current ESC/motor configuration on two aircraft is rapid roll/pitch corrections that make video unusable. Same on my hexa with these same motors and escs. Very powerful motors - extremely fun to fly, but incredibly shaky video - not Jello mind you, shaking.
Hopefully this is all a moot point. I have some KDE3 520XF-400s are on the way and I will start over. There is no doubt that they will handle the AUW.