Even though the motor is leveled, the heading continues to rotate clockwise as soon as it takes off. The same is true for yaw left with the controller.
Incorrect installation and configuration may cause this situation, and you may also need to perform PID adjustment.
https://ardupilot.org/copter/docs/connect-escs-and-motors.html
Thank you for your answer.
I checked both the motor direction and the horizontal, but it was normal.
When you fly, your posture collapses while preventing the aircraft from spinning.
What else could this problem happen other than motor level.
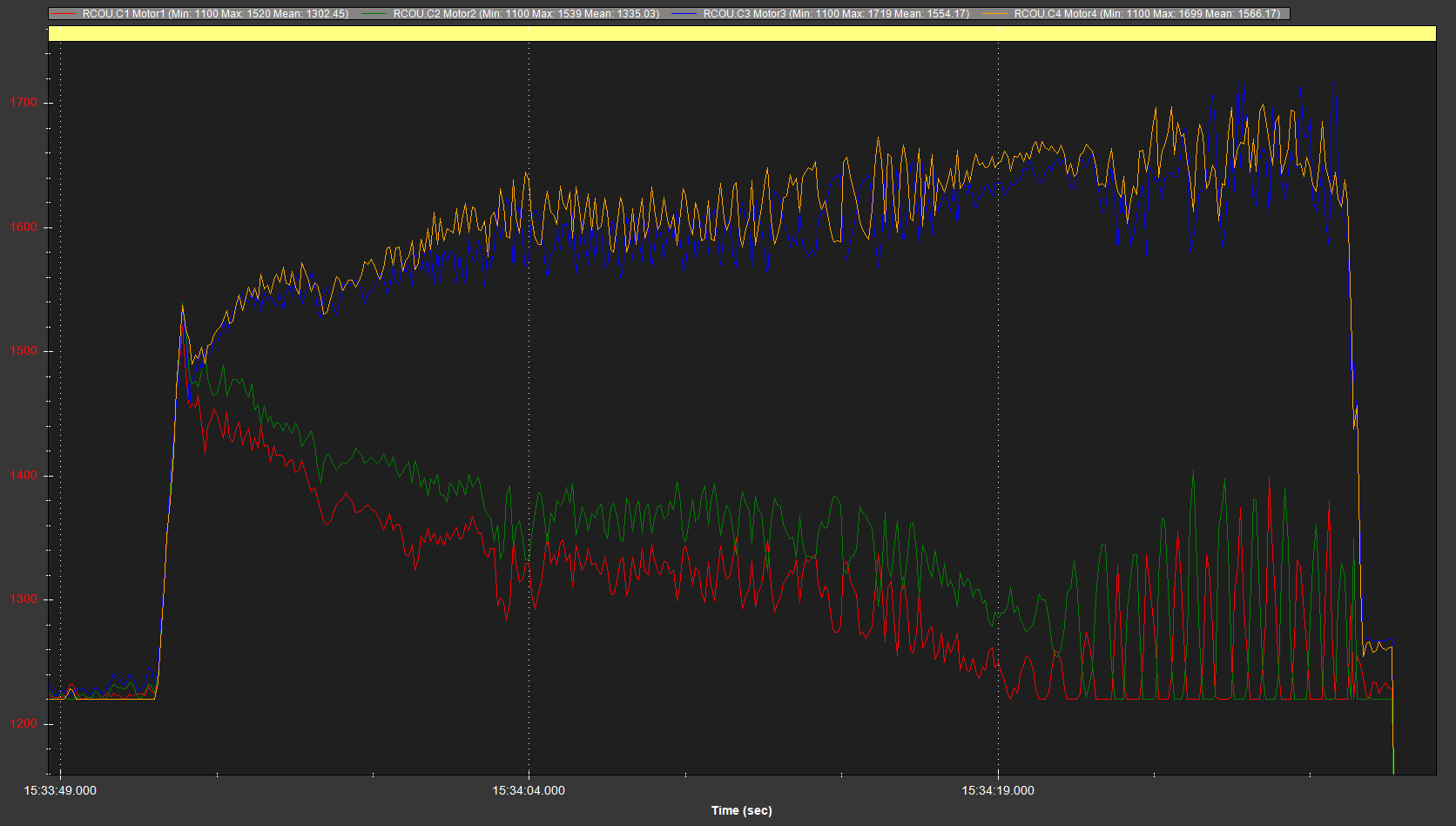
This is log data