Hi guys
There is a problem with the heading in AUTO mode. My copter does not maintain it’s heading towards waypoints . The copter always yaws by a certain amount and it will stay in that direction until it reaches the last waypoint.
please help me . I really don’t know what to do as I have done a lot of compass calibration also I did compassmot calibration too but no progress so far.
00000173.BIN (444.6 KB)
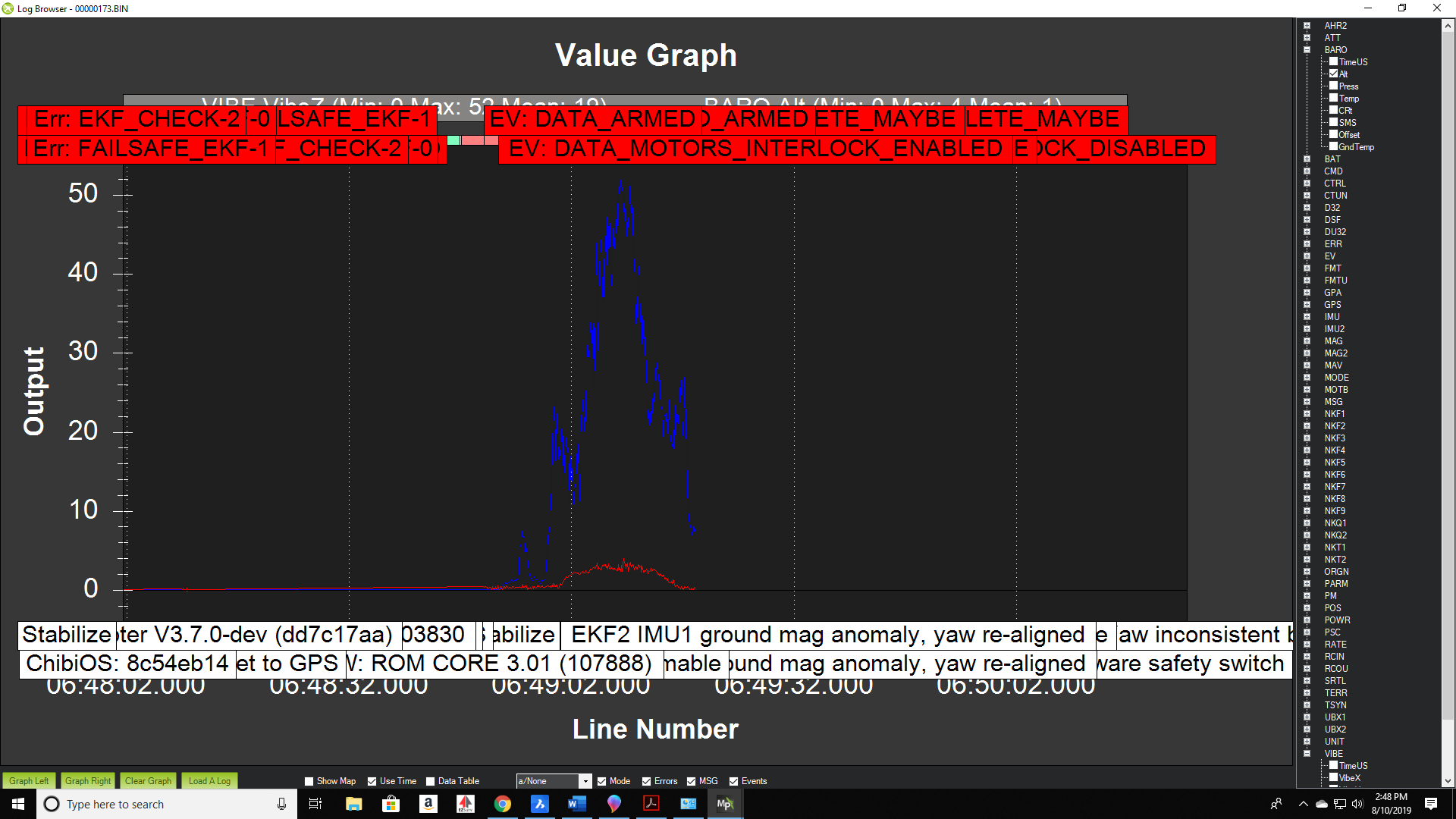
vibes get worse and worse as you fly.
I would look at this first
Post a photo of your copter too please.
Does it do this if you disable Compass Motor correction? Set COMPASS_MOTCT to 0. The offsets will remain and you can always re-enable it.
Hi @dkemxr
Ok I’m going to try it out.
You also may want to try The Quad-H configuration for that setup. Just note that the motor order is the same but the prop directions are opposite an X-frame.
Those two fins could be a source of vibration I would think.
I don’t think you can determine average levels of vibration when in Auto mode. Hover for a few minutes and post another log.
@dkemxr Thanks for your response
Here you are:
I think it’s a cool frame. Looks like you could add a stabilizer to the top of the fins, eliminating any twisting.
The main vibration thing I see the the front wires are lose under the props. Be careful trusting all those bullet connectors on a quad too. They will someday fail, very soon if they are left lose. It will probably be the motor end that fails even if they were factory because of brittle alloys in the wire. I would lengthen the front motor wires so you can tie them up. Solder straight to the wires and ESC if you can.
Vibes are borderline but not terrible. Tuning is pretty good actually for pitch and roll but oddly Yaw has some mild overshoot. Usually Yaw is spot on. I’m not sure if it’s related to Motor Compass Compensation, a Frame Type issue or it just needs Yaw tuning. You could try a single Yaw axis Autotune and see if this improves.
I agree. Dave’s advice should be valued here, as he is years past my experience level with audupilot.
@dkemxr @mtnsurveyor
Thanks for your advices.I will consider them and let you know here.
I have already tried Autotune on yaw axis.the result was an increased rate P gain up to 2 and rate D gain decreased to 0 and FILT from 2.5 to 5 and Stab P gain from 4.5 to 4.2.
but that didn’t help much.
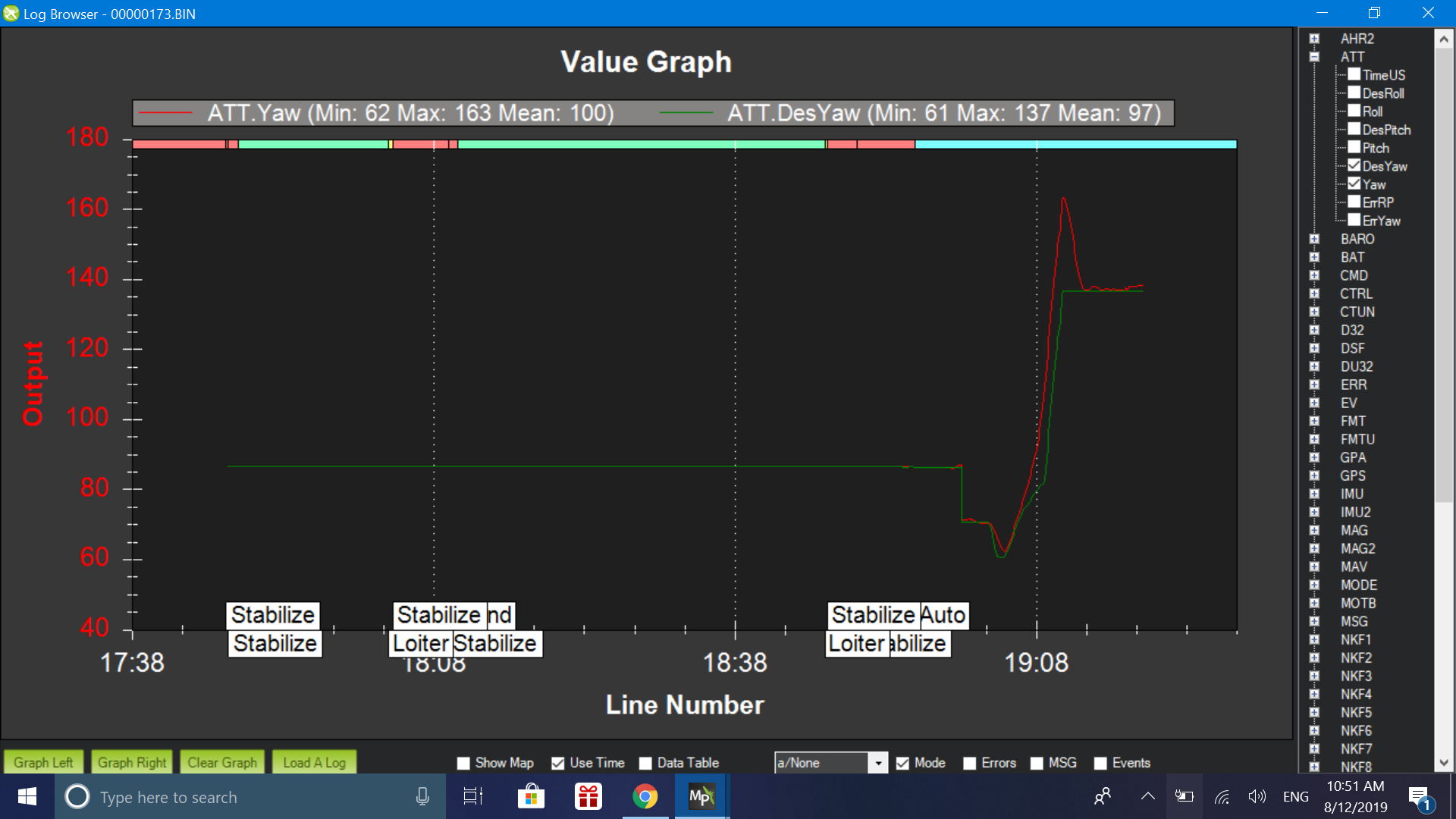
If you take a look at the YAW and DesYaw graphs something is actually pretty weird .
It seems the desired input to the YAW controller is intentionally forcing the vehicle to yaw in that direction.I’m pretty sure I set all the waypoints to be on a straight line.
but the desired YAW is going about 50 degrees off course.
Hi
How are these two types of frames diffrent?
I just see they are diffrent in terms of motor order…
It’s how the arms are connected to the frame . X is individual arms to the main frame and H is 2 pairs of arms connected thru common arms. Your frame is really neither of these that’s why I suggested trying H.
Hi Dave
Quad-H frame makes it worse.
It started to yaw even in stabilize mode.
Unfortunately the log file wasn’t saved properly for an unkown reason.
OK, so X is probably the best choice. What happened when you disabled compass motor compensation?
Hello, I have recently rebuild my quad with a new 2.1 cube - I sent it up and ran an automatic mission but the drone failed to rotate at the waypoint (forward not facing the next waypoint). It did fly to the waypoint but held its previous heading throughout the flight and completed the mission (though I had to manually disarm after landing as it failed for second time to disarm using sticks. Attached is the log of the flight and I can post a bin if needed
https://1drv.ms/u/s!AmW8JONezY1Ugf0ndsVlvp5TXMIN6Q?e=o0yPId
also pic of quad is here
https://1drv.ms/u/s!AmW8JONezY1Ugf0pj5T4R9M0HyssSQ?e=1frtg6
Thanks
Thanks for help
Need the .bin file the Tlog is not of much value.
Thanks
Here is the BIN file
https://1drv.ms/u/s!AmW8JONezY1Ugf0pj5T4R9M0HyssSQ?e=1frtg6
while your looking at it please let me know if you see anything I should be concerned with
Thanks
Mike
All I see in that link is the photo of the craft. You have posted in AC3.6, if that’s what your are running, update to latest Stable. 4.0.3 today.