I have been flying my drone for over a month now and it is flying pretty well. I am trying to do a compass/motor calibration and having trouble with it. I am using a Herelink running QGC, Standard Cube Black, Here+ Compass and running Copter 4.0.4 dev.
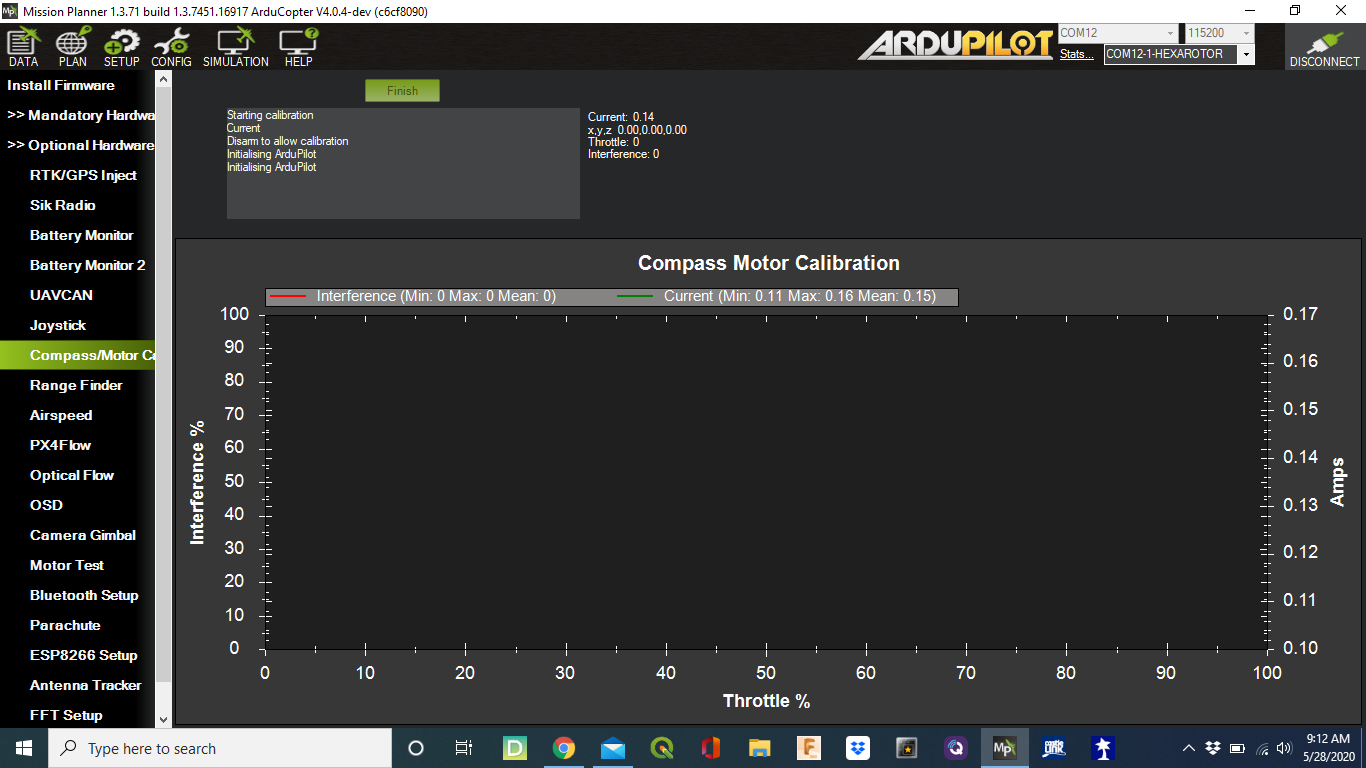
Per the wiki (see screenshots) I hold the Herelink throttle down, plug in the drone, connect usb cable to drone and then connect Mission Planner. I then open the compass/motor calibration menu and while still holding down the throttle I press Start. It arms the drone and then I bring the throttle up to roughly 60-75% for 7-10 seconds (albeit a little scary) and then bring it back down and press finish.
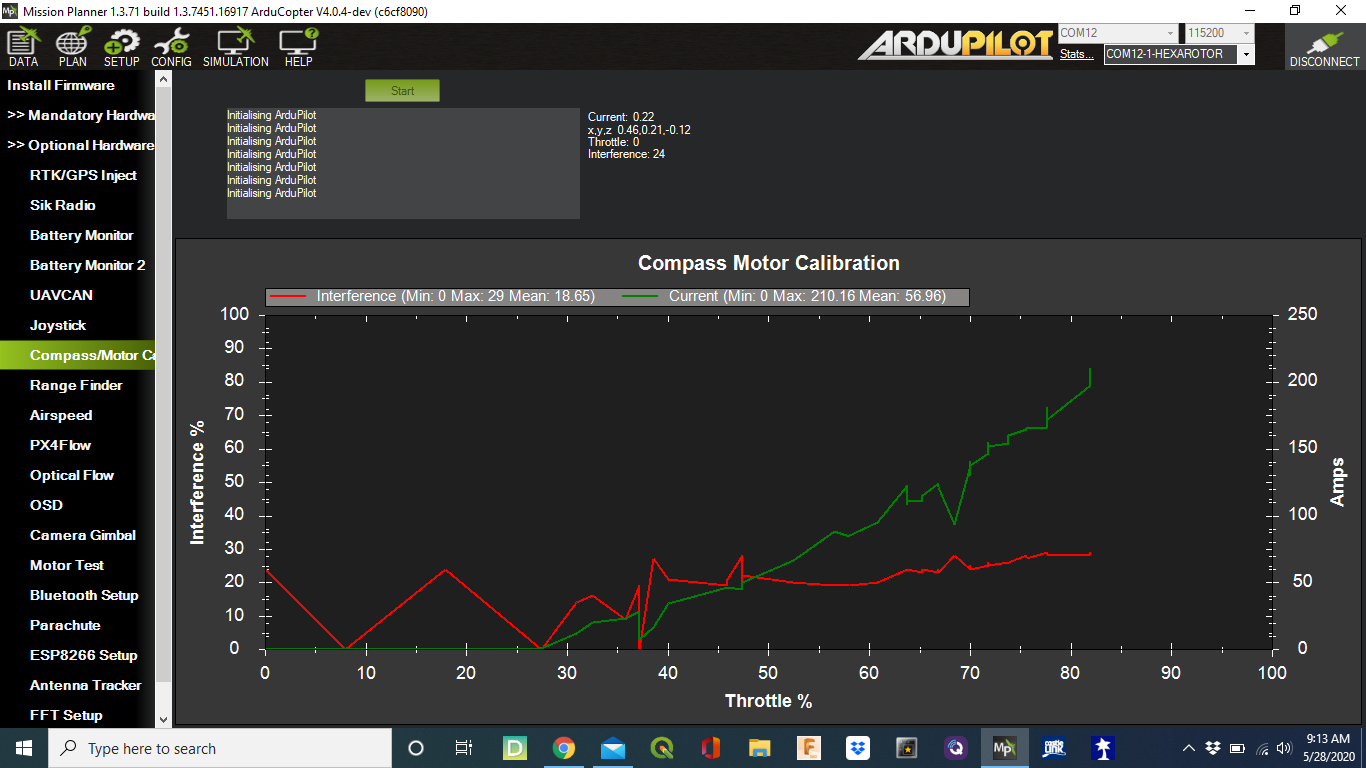
It never disarms the motors after and does not record any numbers to compass_mot_x,y,z. I have tried it a couple times with no luck. When I press finish all it keeps saying is ardrupilot inistialing over and over (see picture). I am using a Mauch current sensor and it is reading well in the air. My interference comes just under 30%, but the graph seems very strange. I am not understanding why it goes to 30% initially before the motors just start barley spinning.
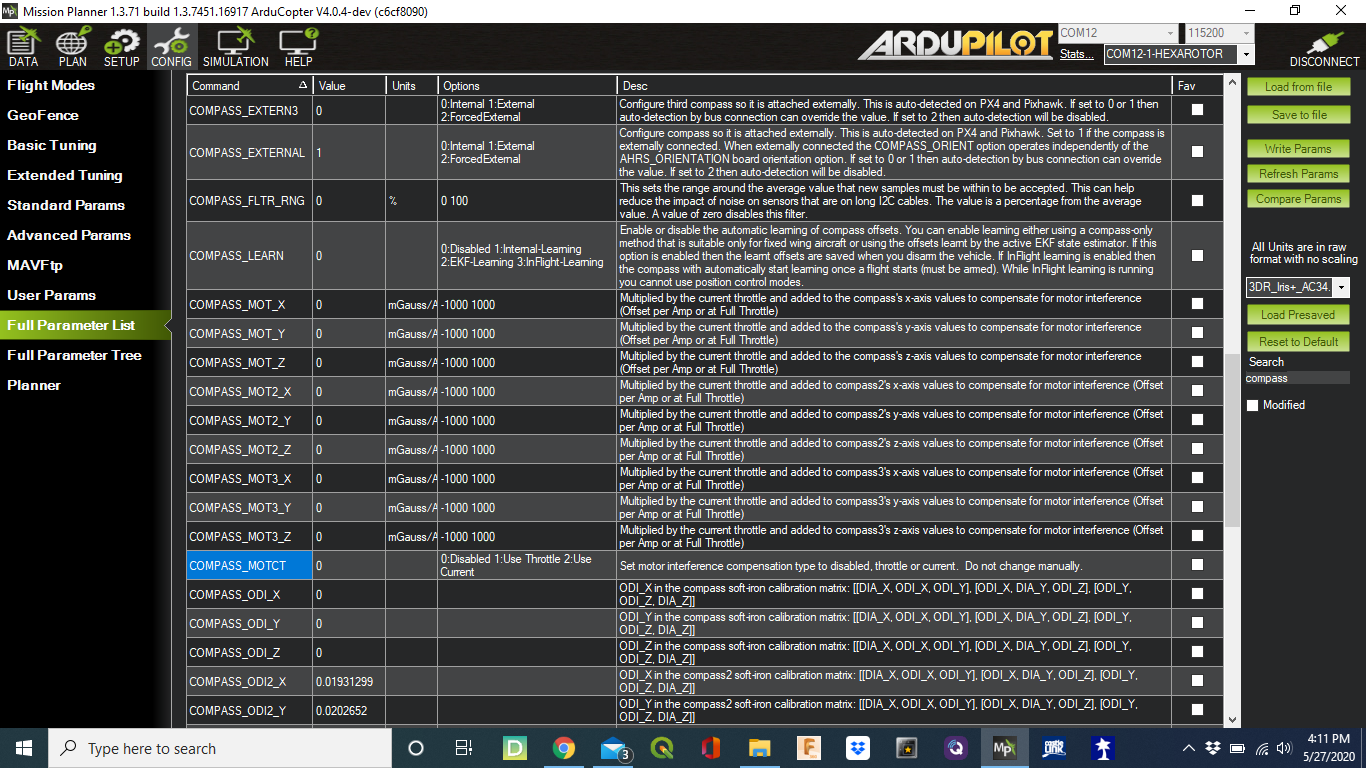
One thing I did notice after I finished and is highlighted in blue is the compass_motct is diabled, but it says not to change this manually.
Would the Herelink be the problem running QGC? Thoughts? Suggestions?
Thank you.!