Hello and thank you in advance for the answer.
I am working with Holybro Kit S500 V2 Pixhawk6C and using LiPo 4S 3800. Also for the control, I am using DroneKit python where the script is sent by the telemetry then I will use raspberry pi.
My tests are done using a simple code to move using the velocity and x,y in the NED frame.
The problem is the drone is not so stable and at the same time if I move for example 2m and then go backward I don’t arrive at all to the same position.
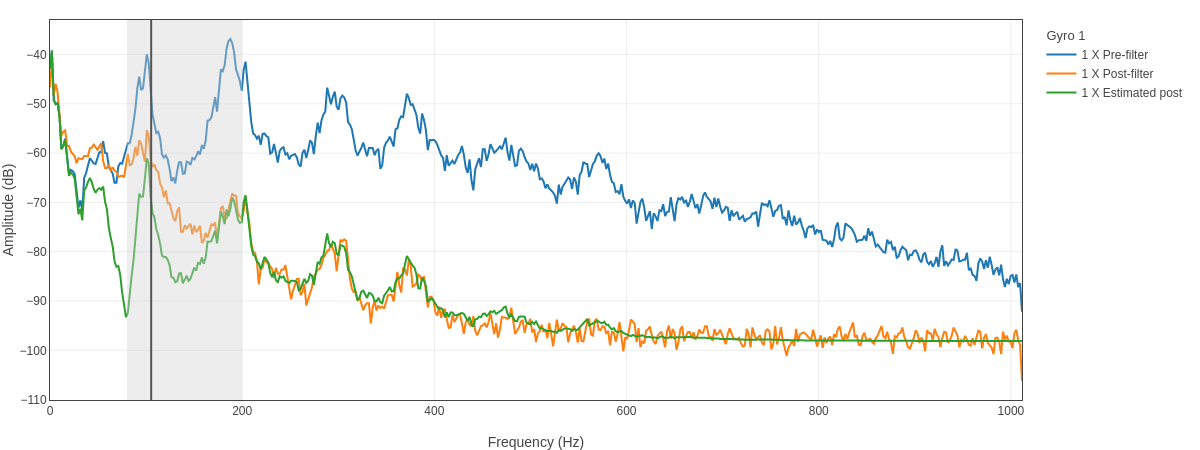
I tried to do some manual tuning and then I moved to set Harmonic Notch Filter, I had weird results, first I used ECS telemetry mode and actually after watching batch data the result looks good but still the performance of the drone is not so good and that can be seen in Roll/DesRoll for example.
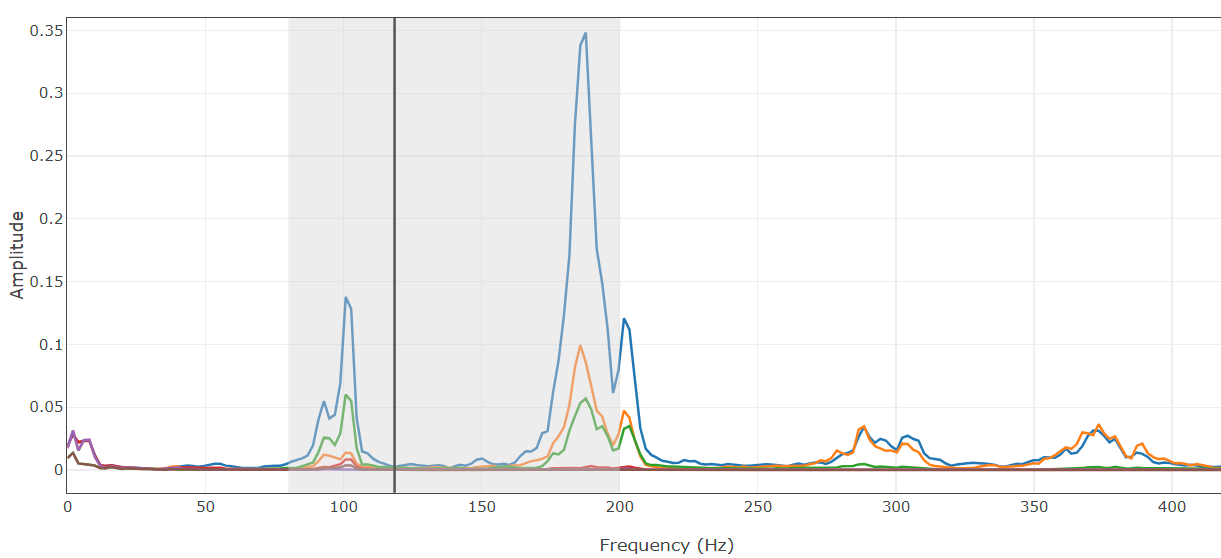
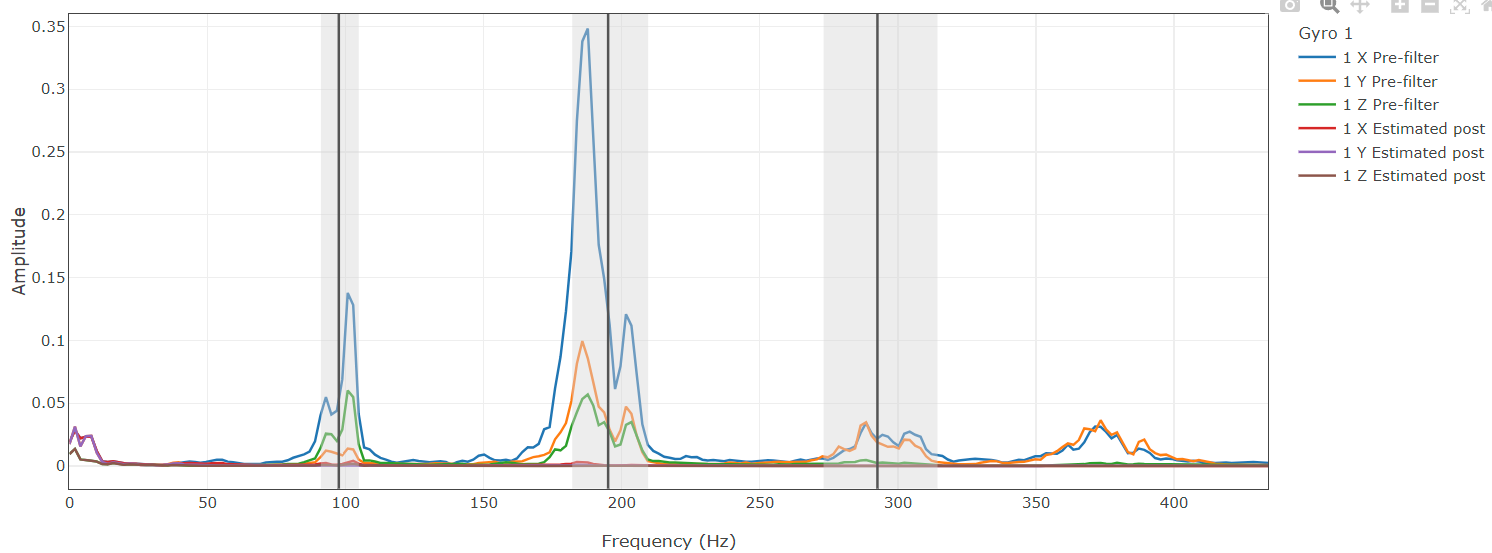
Then I set the mode to FFT, I thought it is the best mode for the filter but surprisingly the results that I see in batch samples are not so good also the performance even got worse.
I am not so expert in Ardupilot it is my first time using it, so I don’t know if there is anything wrong with the parameter or if I configured some values wrong, please note that I don’t use RC transmitter at all and for that, I could not do autotune.
Here you can see the log for ECS mode
Here for FFT
And the parameters
Thank you very much for all the help