Hi all, I have been working with the dynamic notch filter and the things in the wiki is still a little not clear. I have few questions regarding the notch filter and i was reading as many discussion topic as possible and still i think there are information in each topic but not everything is in one, so i think to ask some questions here and later turn this to a manual for the dynamic notch filter for dummies.
In the Batch sampling page we have pre filter and post filter what does the post filter mean, is it data after the low pass filter.
In the Harmonic notch filter how does the attenuation affect and how to choose practically the right value.
The INS_HNTCH_REF=MOT_HOVER_THST or the formula. I have the motor hover thst to be 0.259 and i set INS_HNTCH_REF to be around 0.155 because some one said that it can be around 0.6*motor hover thrust. Is this correct cause i see the drone not responding well in the landing, with alt hold mode.
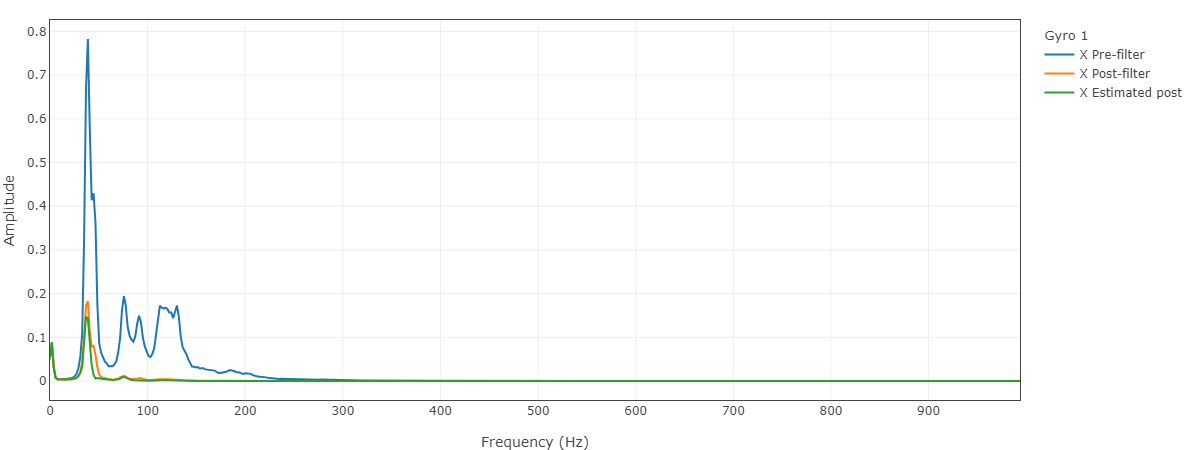
In the diagram here i have the value of the INS GYRO low pass filter to be 20 HZ but the spike still is there how hard i try to change ( i am using the firmware review tool) with the notch fitler activated at the spike frequency, and when i take the 20Hz to 10 Hz and with the notch there enabled it works. Should i do that.
Read the published documentation, configure as directed and then post questions with a .bin log file from the attempt if you have them. Dynamic Notch Filter
Hey dave, thank you for pointing out the link. There are few things in the wiki i could find after scrolling line by line in multiple pages. I would like to know more about the meaning of the things, actually it is wired that the log was deleted. I am not able to save the new log so i could not post here.
What i would like to know are two things only for now before i do the test flight again on saturday.
The post filter is it the one after the low pass is activated, please note i have not enabled the notch.
In the throttle based notch i could see wiki saying use it as
Set INS_HNTCH_REF and/or INS_HNTC2_REF = hover_thrust to set the harmonic notch reference value
And then i see people considering an approximation with 0.6x hover_thrust.
What exactly should i do with this, cause if i increase this i am seeing my peaks just goes off in the review tool. But i felt that there is a lag in my throttle that was controlling from my radio.
Yes.
If you set these, you get both pre- and post-filter data in one log. It’s also safe to leave these set forever unless you’ve got a particularly poor flight controller.
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Yes use the approximation if you are using throttle-based harmonic notch. It can be fine-tuned with the filter review tool if necessary.
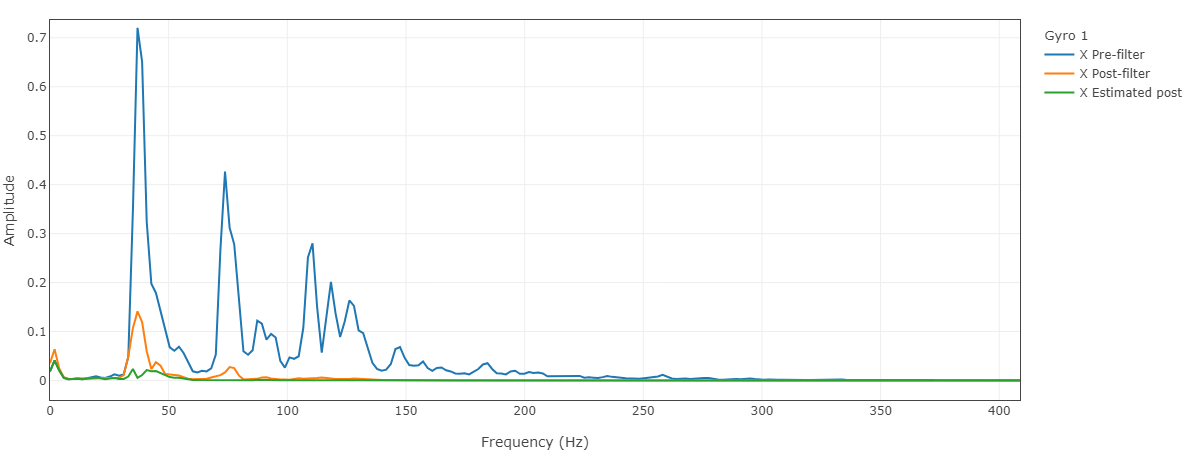
In your graph there is quite a serious spike around 30 or 40Hz , then a bunch of noise above that. There could be issues with the frame or the way the wiring is connected to the flight controller - a whole range of things!
What size props do you have? Can you supply a .bin log?
I wanted to know what exactly is the post filter here. Is this the data after the low pass filter is activated. Since i have not enabled the notch yet or is it the suggestion.
Yes i have this enabled. And i am seeing the frequency data well.
Yes i am using that tool. That image i took from them, in the filter review tool when i change the INS_HNTCH_REF to be Motor thrust hover, which is learning and saving and i see the spike has fallen in the green which is the estimated post filter . I see that the spikes just minimizes a lot.
I am not sure which value to use, some use 0.6*MOT_THST_HOVER and in the wiki it also says we can also just use the MOT_THST_HOVER. What should i see here to have the correct value. I have a graph showing
What i am curious is the reference value for this: INS_HNTCH_REF and how this value would effect or to be more precise how can i feel the change in this value.
In the last flight with the notch filter activated and the mot thst hover being 0.259 and the INS_HNTCH_REF being 0.155 which is 0.6*0.259, i see the motor has lag in the throttle stick.
I think can be the mechanical vibration. I am just trying to remove that through the notch filter, what do you think can i do that. Considering i am isolating the wiring and other stuff, just the frame vibration is there.
Its a 22.4x8. Sure i will send you the bin log as i am not in the university right now, i will upload the bin log as soon as i get there.