I ve already tested the servo using full duplex uart with my autopilot (and an extra board which exclusively converts full duplex to half duplex) and it works as expected. So the script and the messages sent are correct. My doubt is regarding:
the configuration. Apart from serial4_option → 4 do I need to do anything else?
the connection. Do I need to add any pull up/pull down/or anything similar?
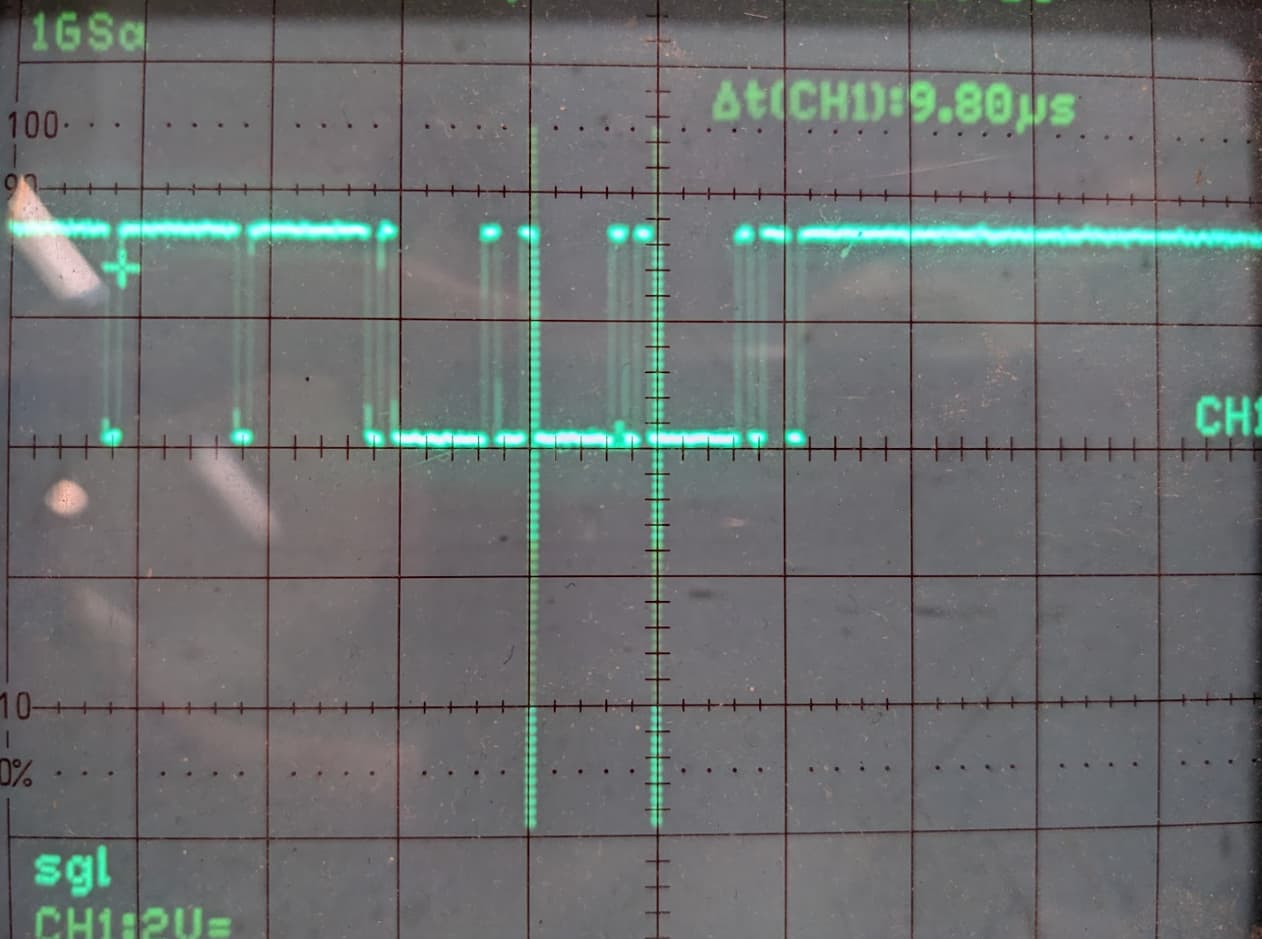
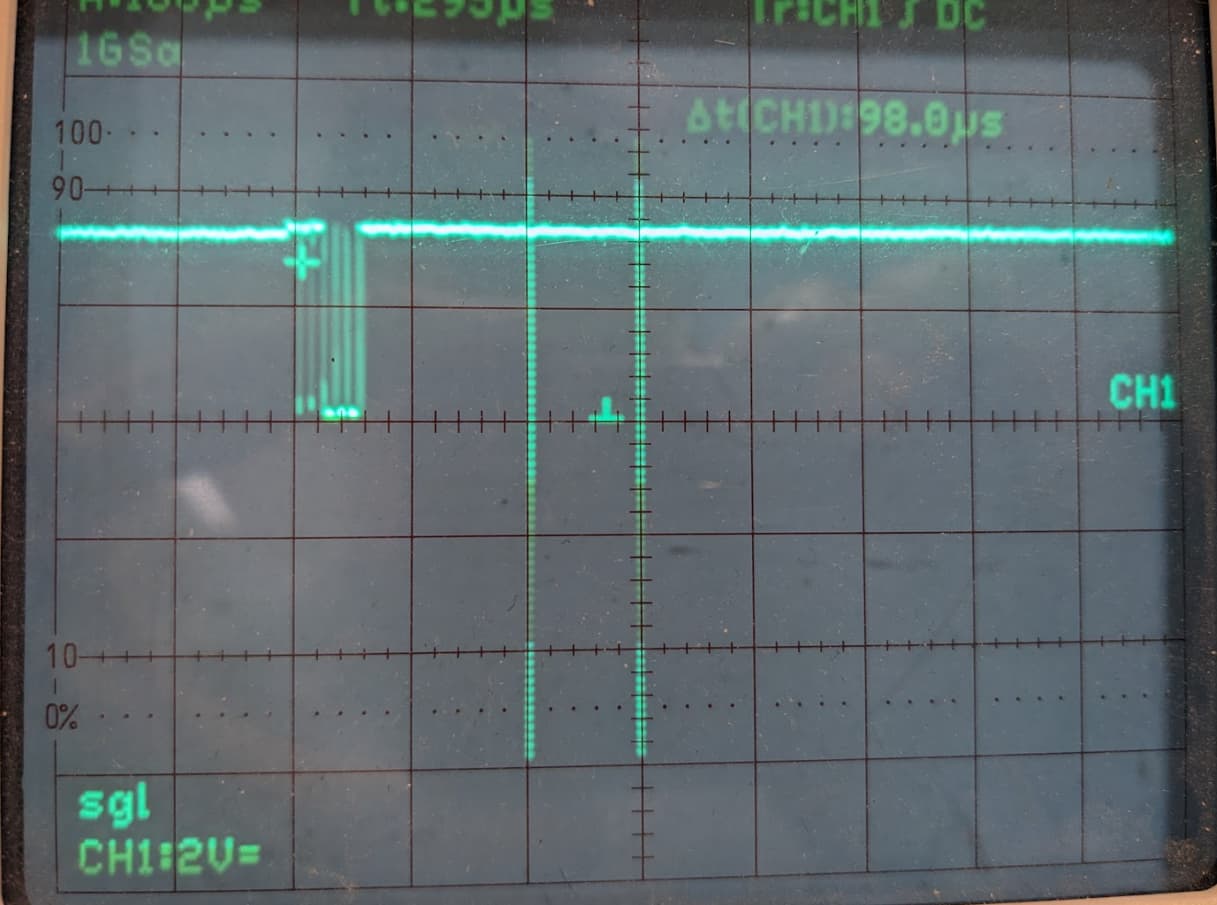
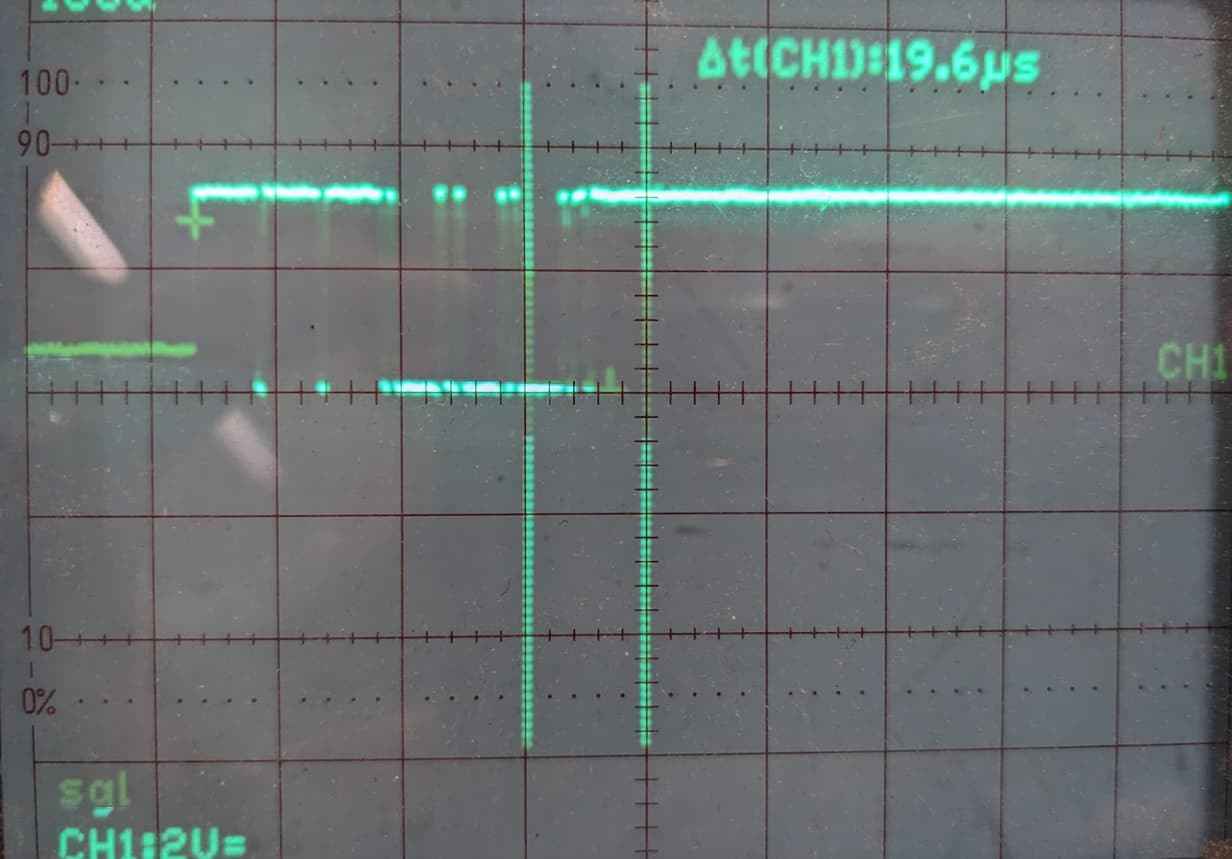
That should work from a AP point of view, however sometimes the extra protection circuitry that the premium flight controllers have mean its harder for the servo to drive to the logic level. For FrSky telem, a 10K pull down is enough to get it working. If your logic analyser has a analogue mode you might see servo trying to reply but not reaching the logic level.
It could be that the input protection circuitry is just incompatible with half duplex. 0.6v should be just low enough to get you to low logic state on a 3.3v system.
You could see if one of the nativity supported half duplex telem protocols works (frsky Fport for example), or you could try on another flight controller, typically if it has solder pads rather than connectors there won’t be input protection.