I am having an issue where once I save parameters and write them to the FC , disconnecting the FC from power causes the settings to be wiped. This includes flight mode settings , UAVCAN settings and rover steering settings. I have had no need to modify anything else yet.
I am using ArduRover V4.1.0-dev
If I load plane, (which can be done from inside mission planner) any parameters I change are saved correctly after disconnecting power . (CANBUS GPS operates correctly)
I have read a few threads where others have said they are successfully running rover on the H743.
I am quite new to later model controllers so I could be missing something basic. Any thoughts appreciated on the matter.
It would be appreciated if you could send us the contents of your APM/STRG_BAK directory on the microSD card so we can analyze the corruption that happened.
There are no files on the SD card. I checked with both rover and plane installed . I checked through MAVftp and by removing the micro sd and plugging it into my pc. Reformatted and tried again and got the same result. SD is formatted in fat32.
I have to apologize. I lost track of the firmware versions my rovers are running. The rover with the H743 Wing is actually running Ardurover 4.1.0dev. I wrote that it was running 4.0 in the other thread.
I do not have problems with 4.1.0dev, though. I did not update for a while, so perhaps recent changes messed something up.
Ok same result. I have noticed that after writing parameters ("parameters successfully saved "dialogue appears) that when going back to the initial setup page that the mandatory hardware tab is missing and replaced with loading. A message showing “Parameters are still loading. Many screens will not work until parameters are loaded.” This shows for approximately 90 seconds before mission planner returns back to normal. I’m not sure if that means anything or is completely normal.
.BAK attached below
Test with latest “ArduRover V4.1.0-dev (5a941ce0)” on Matek H743-MINI.
Parameter changes are not persistent saved. Has old value after reboot.
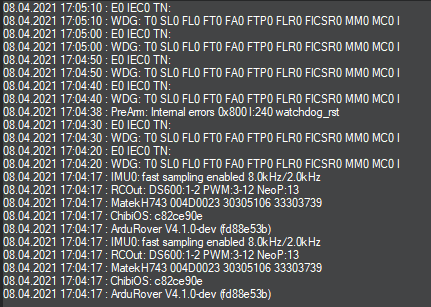
When arming shown in MP:
Internal Error 0x4000000
Prearm: Param storage failed
The APJ “latest” for MatekH743 is one day old. Maybe is was not build after the change?
Alle other tragets were build 8. April.