I’m running Copter 3.6-rc1 with ChibiOS on the revo-mini. I’ve built a H quad and I can’t for the life of me get it to take off. It just flips on takeoff. I’ve calibrated the ESCs more times than I can count, I discovered and corrected a compass issue (physical board direction is wrong compared to AHRS_ORIENTATION), double-checked my wiring, and motor-prop layouts. I’ve scoured this forums for a while and Googled around but everything I’ve tried has not worked so far. I think the issue is localized to my setup/the revo.
Unfortunately I can’t get logs from the autopilot because there’s support for logging on the mini-revo.
What flight mode are you using? Have you tried taking off in stabilize?
I recently had a copter flip on me with 3.6-rc1 as well. I was using guided takeoff to 2 m. The first time it flew fine, but the second time it flipped immediately on takeoff. I had the hover learn parameter set to 2. My theory is that the copter thought it was flying when it was still on the ground. I also noticed that the bark didn’t get reset to 0 on arming or loading waypoints. Perhaps the hover throttle value is too low?
If it flies fine using stabilize, I would set the mot_hover to ,5 and set mot_hover_learn to 0 so that it gives it plenty of power to fly initially so that there is no confusion about whether it’s actually in the air or not when using guided or auto takeoff.
I also noticed on mine that the barometer didn’t reset to 0 on arm or when the mission was uploaded. My initial takeoff altitude was 2 m and the barometer was a little under 2 m on the ground. In the past, I’ve had to increase my takeoff altitude to 3 m or more just to guarantee that it was higher than the barometer so the flight controller wouldn’t get confused and think the copter was already at altitude and not provide enough power.
If it won’t fly in stabilize then there is another issue such as R/C calibration or mapping. (I’m assuming the motor spin and prop orientation are fine since you’ve double checked those) Try slowly increasing the throttle and observe whether the copter is tending to tilt in a given direction. The trim for that direction may be off. You can also try taking off in auto mode since that will bypass the RC. Have you tried using loiter as well?
Thanks for the reply! It does not take off in stabilize. I’ve upgraded it to 3.6.0-rc8,1100KV motors, 10 inch props and a 3S 2200mAh battery (I know that’s a bit low, but it doesn’t seem to have trouble producing thrust).
I’ve:
Calibrated the ESCs dozens of times.
Calibrated the accelerometer, compass, and other sensors dozens of times.
Replaced the motors mounts with aluminum mounts.
Double and triple checked the motor and prop layout based on this using the motor test functionality in Mission Planner.
Two of the props have an R on them, which I assume stands for right (as in clockwise). Should I switch them up?
The props look OK in those photos, provided the motors spin them the correct direction.
Motor 1 ESC connected to main out 1 on the FC, for front right arm.
Motor 2 ESC connected to main out 2, rear left.
Motor 3 ESC connected to main out 3, front left.
Motor 4 ESC connected to main out 4, rear right.
You should be able to arm the copter but do nothing else and the motors/props will spin, then disarm after a few seconds. While the props are spinning focus on just one to visually check its spin direction. Repeat for each. If one spins the wrong way, swap two of the three ESC wires and recheck.
Also try calibrating Level Horizon too, just too be sure. It can be done separate to all the other accel/gyro/compass calibrations.
Export your params and post here, might be able to spot something…
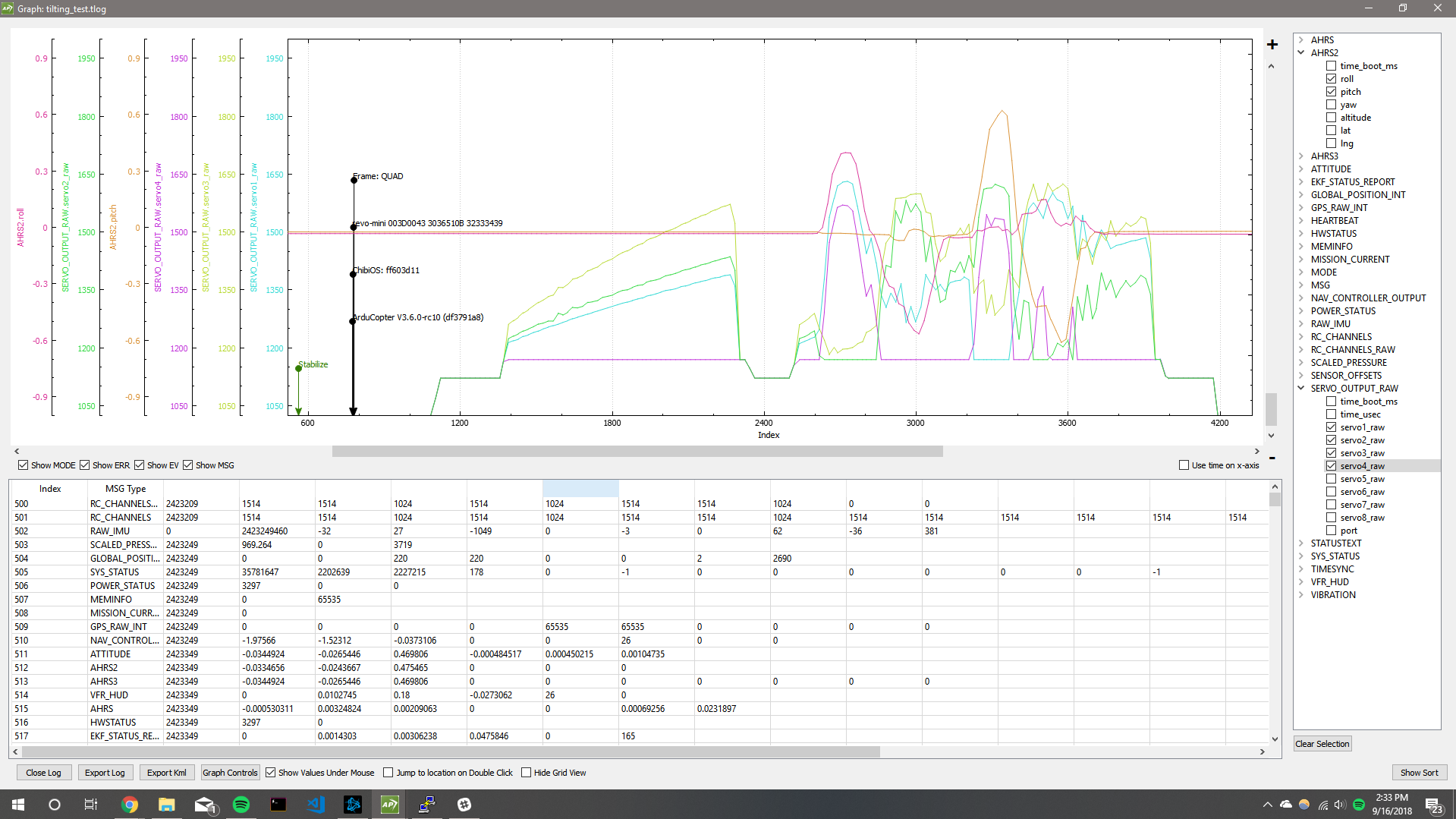
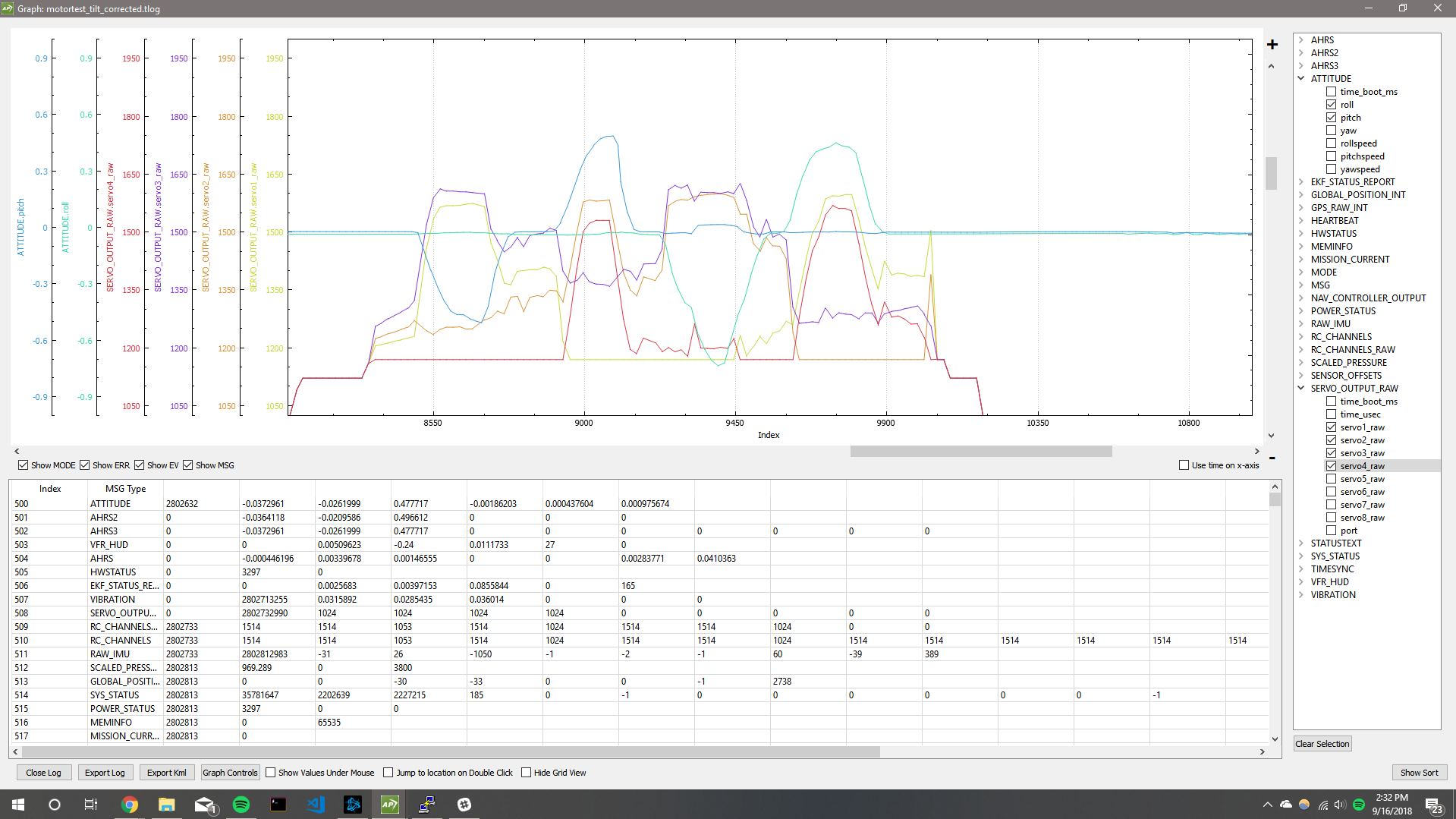
Thanks for the reply! I managed to hack together a solution with a Raspberry Pi that would let me get telemetry logs from the vehicle and I did a simple tilt test. I powered up the vehicle with no props, armed, and tilted to see if the motors would do the correct thing. The order of the motors in motortest does not match the diagram from the copter documentation page, and I assume that’s what I was going off of when I originally wired things.
So before, it looks like it was doing the opposite:
It was good that you figured it out, and such a useful method using a Pi.
The mission planner motor test can bea source of confusion as it tests the motors in a different order to how they’re numbered in arducopter.
{kind=link}