Hi, i am working on a big drone that have an H-frame. The drone is a vtol but i am posting this question in Ardcopter page since i am in hover phase testing. This is my first time working with DroneCAN protocole so I appreciate your guidance and support.
Hardware units are: Cube Orange+, Here3+ GPS, and 8 Vertiq 330KV motors.
I would like to understand if the parameter setup similar to when we use ESC telemetry? I was flying quadcopters with ESCs AM32 and their setup was mainly from (servo_blh_xx) params. Should i configure them as if i have esc telemetry?
In terms of notch filtering, i used to depend on ESC Telemetry measurements. Is it the same case with DroneCAN ESCs?
Can I share with you a flight log and have some deeper ensights about my parameters? I am facing difficulties to tune this drone but i have I still have some hardware issues that i need to fix first. I would be grateful if at least you check my parameters config look good enough as a start.
Yes I have followed this config. And in my logs i can recieve the data related to rpm, temp, etc.
Do you have any comments about harmonic notch filtering setup?
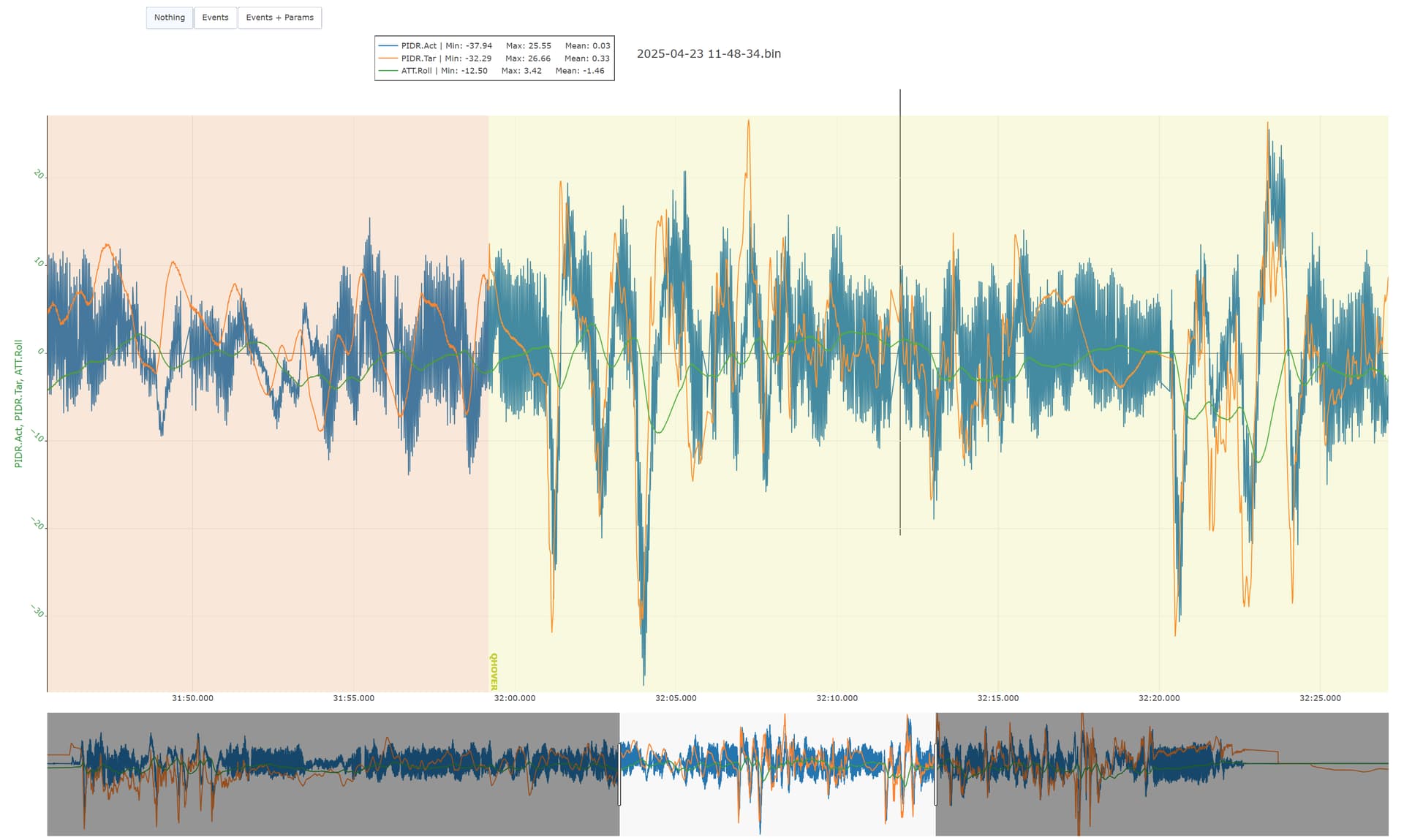
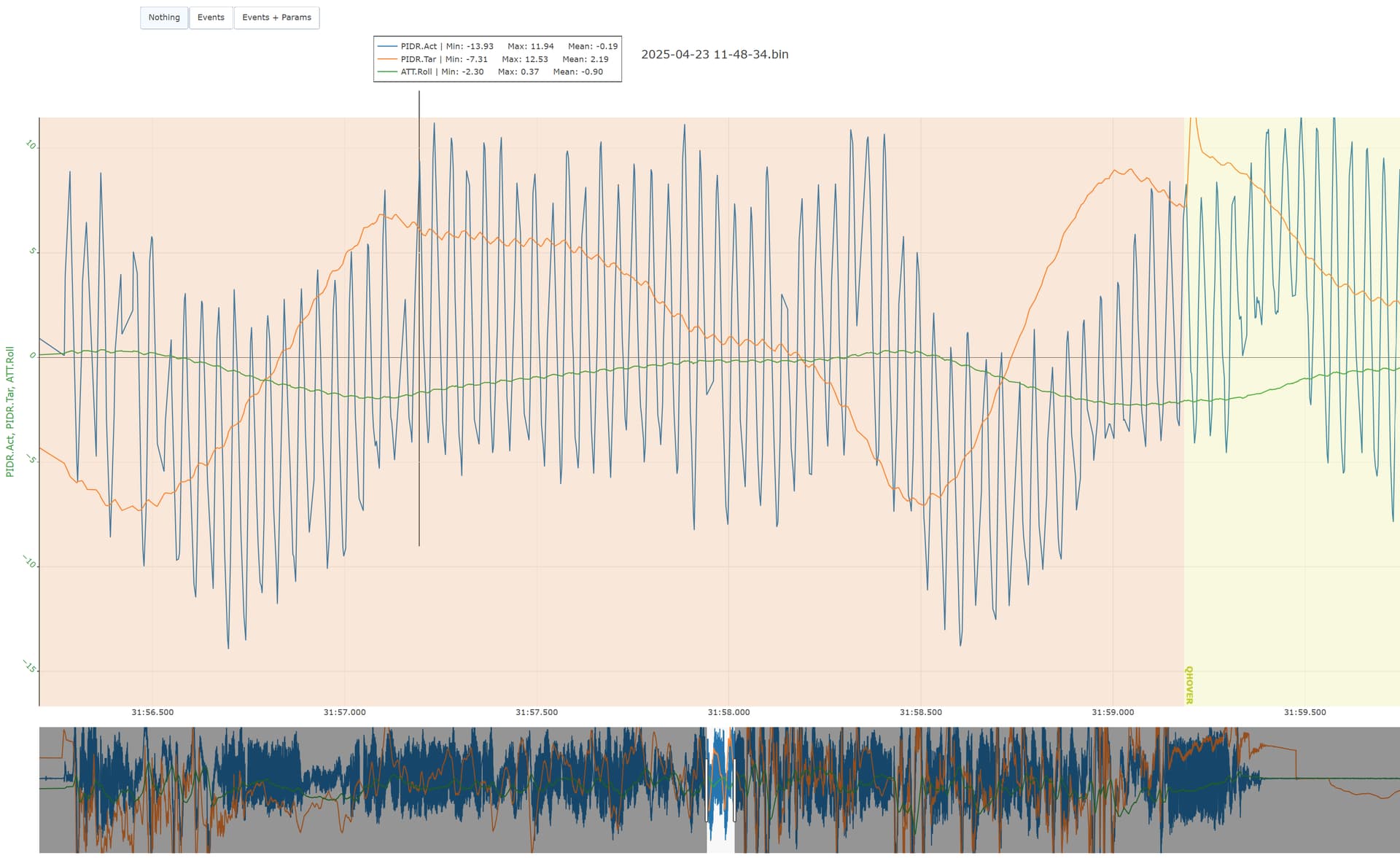
Is it okay for you to take a look on these logs and give some insights about what mistakes I have? The drone is losing altitude immediatly whenever i command any attitude input.
I am trying to tune the drone but I never succeed achieving a better behavior. The drone is flyable and stable but not for auto missions.
what do you suggest to start with first?
I have no hot motor temp, also no hot escs. I am not sure of Audible vibrations/oscillations (honestly i dont know how can i test such thing for a big drone) and its not hard to control.
I can observe some shaking but cant tell if this is really the main issue.
Do you think lua script quick tuning for vtol would give me a better start?
This might be a stupid question.. What do you mean by AMC form?
I never worked with such drone size so I am bit lost. Also never faced such oscillations - I am not sure if its coming from structure or its just the controller
It has been used successfully in drones raging from 600g to 350Kg.
Yes, it will work fine with 25Kg.
The tool is not a single-button-press-and-it-fixes-all-your-problems-tool !
It will not change any parameter behind your back. It is a what-you-see-is-what-gets-modified tool. You are 100% in control of the changes. You are required to read instructions and change parameter values.
If that is not your cup-of-tea, do not use it.
I asked because I never used the tool:)
I was seeking for more insights from this community as you have more experience and knowledge rather than keep diggimg around and getting more lost.
I will give the tool a shot and hopefully it is a controller issue and not structure. In case i got stuck with the process using your tool, would you mind asking?
To get help from others on how to use the software (in order of preference):
Use the user support forum and include a .bin log file and a .zip file with all the intermediate .param files if possible. If you’re not sure you have a bug, you should seek support first.