I like to ask if it is possible (or planed) that the ground steering function is “looking” on the gyroscope instead of the compass to keep the plane on track during takeoff ?
If I start a EDF Jet the compass value get a significat error in the takeoff phase due the acceleration and the magnetic field from the EDF motor.
Of course I could correct that with the rudder - but then I don’t need a ground steering function.
Even cheap stabilzte systems could handle to keep the plane on the track during takeoff.
So I think would be helpfull to switch the “control input” for the ground steer function so that it roll just straight ahead during takeoff.
Do you mean during auto-takeoff? And do you have evidence that the system is NOT using your gyro? My guess is that it’s using the fused heading estimate from the EKF, which would be influenced by disagreement between the compass and the gyro, but would not rely solely on the compass. I think the fusing should also consider the GPS-difference during takeoff, and that would give a 2nd sensor for heading, which supports the gyro’s evidence and disagrees with the (erroneous) compass.
A side-story which may be related: I once auto-tookoff from a boat. When I initially powered on the vehicle, it was too near the large boat engine, so the compass was actually wrong by a huge amount. On takeoff, I was far away from the engine, so that wasn’t a factor any longer. When I was reviewing the logs, I found a warning message that the compass direction was sensed to be inconsistent with the gps-heading and the gyro, and it reconfigured the compass calibration accordingly.
The moral of my story: I believe there are “smarts” in the system which should handle your case. If it is not working, could you provide logs or details to demonstrate your problem?
I use the ground steering in FBWA mode.
Our runway is 90m long and 5m wide - so the range is limited .
I have observed that during the takeoff the plane suddeny move to the right side, like a rabbit in the field.
Speed was just enugh for lift of - so noting damaged.
Nothing there with a magnetic field - all country side.
Is the ground steering controlled from the gyro or from the compass value? According to the manual I tought its controlled from the compass.
I fully agree with your guess. That would also explain the “Rabbit” behavior.
On Thursday I will visit a large parking area to prepare a few start up logs.
Enugh space there for the Rabbit.
Can you send us a dataflash log where this issue was observed? That will help to diagnose the problem.
Here’s a wild guess: Does your plane have a tail-wheel? If yes, what you call the “Rabbit” might be ground-loop. (You would notice this during a manual takeoff, where the sensors are not being used.)
It is difficult to repeat the problem without damage the plane.
So I did testruns on a large car parking area with limited speed.
In “Manual” mode without the ground steering and in “FBWA” mode wiht ground steering.
Most trys the system was working but on 19:31:46 I got the “Rabbit” problem. Not so strong as ot the runway but I think this is up to the reduced speed.
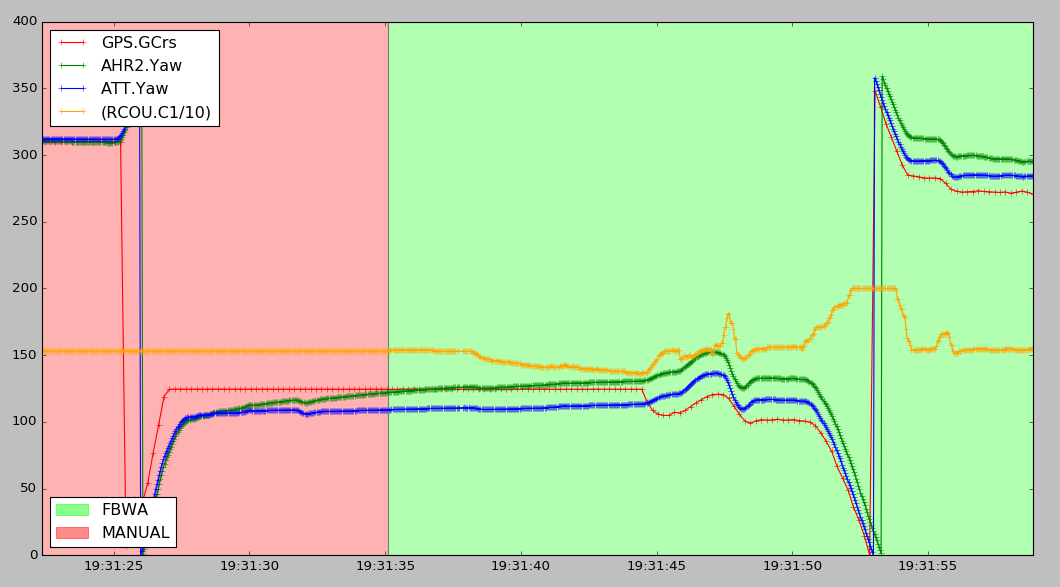
RCOU.C1 is the servo output for the front wheel.
RCIN.C4 is the rudder input from the SBUS.
Normaly the GPS course is follow the magnetic course (AHR2.Yaw) with a small difference but I think thats normal.
At the problem point the GPS and the MAG go opposite directions.
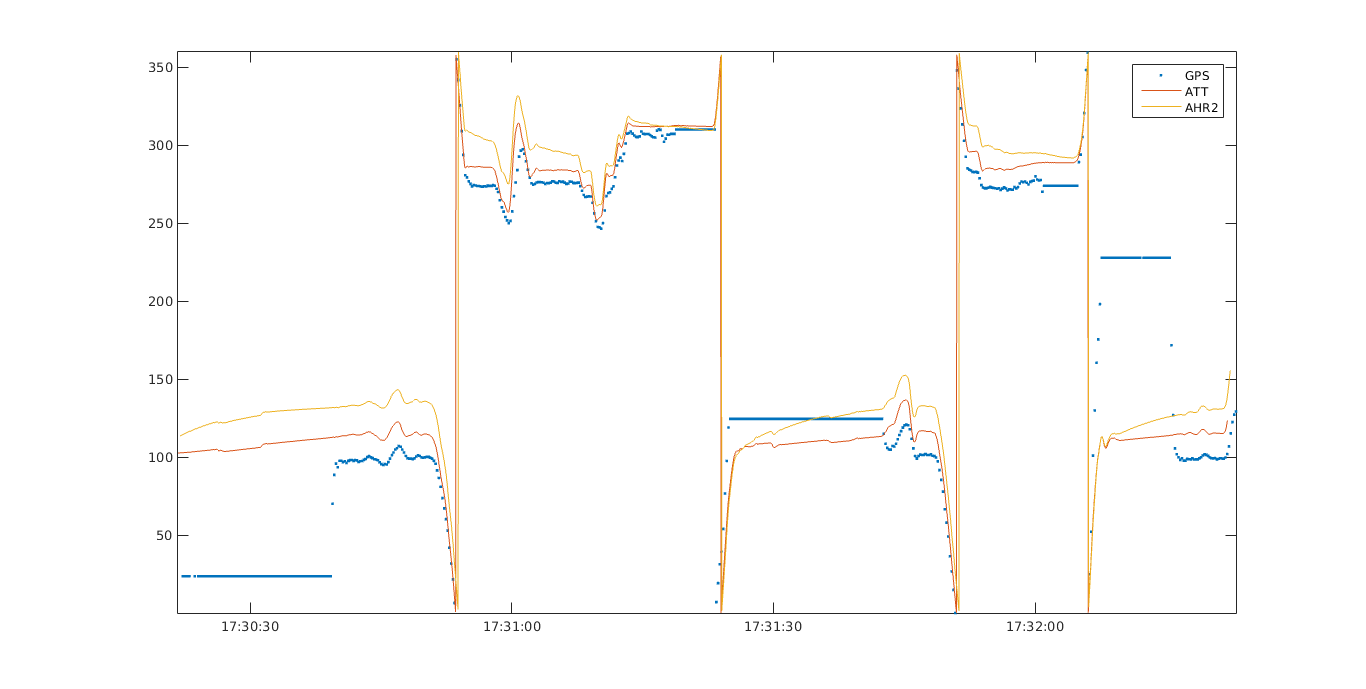
I’m looking at your log. Based on the GPS timestamp, I think the UTC time for the log is approx 17:23 to 17:36. I’m assuming your local time is UTC+2, so my 17:31:46 is your 19:31:46.
I have attached a plot from 17:30:30 to 17:32:00 of:
At 19:31:45 (17:31:45 UTC) the YAW goes in the same direction but the GPS have the oposite value.
Then the servo output RCOU.C1 gives a impuls.
This small amount is enugh to catapult the Jet out of the runway. At this moment we are on a real situation at 70km/h speed.
My question would be how much influence has the GPS value in that case?
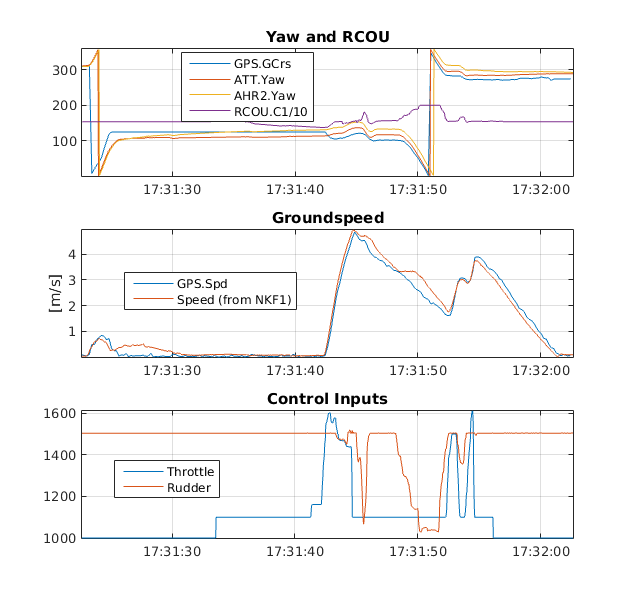
Unless I made a mistake on the groundspeed units, the max speed of the aircraft is 5 m/s which is 18 km/hr. But your post says 70 km/hr… what am I missing?
I also don’t identify what exactly you’re saying is the problem.
Are you talking about the instant BEFORE 19:31:45 on your plot? We observe your plot’s red-line (GPS, blue on my plot) dip downward, while your plot’s green and blue lines (yellow and red on my plot) continue upward… but looking at the speed, we see that this is because the GPS.GCrs is inaccurate when the ground-speed is zero, and adjusts to a value approx 30 deg below the AHR2.Yaw. (Looking across the whole log, 30 deg disagreement isn’t uncommon)
Do you mean the sharp peak in RCOU.C1 observed approximately halfway between 19:31:45 and 19:31:50 on your plot? I see that it causes approximately a 25 deg change-of-course in all 3 measurements, and it looks like the pilot was using the rudder input around that time to cause it.
Sorry I’m being so dense… maybe I just don’t understand what the issue is?
On a different thread, someone else is reporting a sharp-turn with a nosewheel during auto-takeoff. I have no idea whether or not these two instances are related, but I thought I’d drop a link here: Nose Gear making right turn on Auto-mission
OK, I try to explain it better
The takeoff speed from a EDF Jet is about 70km/h.
The test I did on a public parking ground. So only reduced speed as I not like to takeoff the pane.
At the test the wrong behavior from the rudder happens only one time.
At this moment the GPS heading was the opposite magnetic heading at the begin.
Then the rudder gives a short impuls to the right side and the plane is out of the runway.
My guess is that the GPS needs a change of the coordinates to calculate the heading.
At the begin - with low speed - the difference between the coordinates is not so much so it could be possible that the calculation is quite different to the magnetic heading.
I don’t know which values take place in the math of the ground steering. But if the GPS heading is a part of them I think my idea is not so far away from the truth.
I have repaired my old Jet and will use them on the weekend for real flight test with active ground steering.
If it get’s damaged not much lost.
For the flight I change the follow parameters to there new settings:
EK2_YAW_M_NSE = 0.4 (less GPS more magnetic)
STEER2SRV_DRTFCT = 2 deg/m/s
STEER2SRV_DRTMIN = 1000 cdeg
STEER2SRV_DRTSP = 8 m/s
STEER2SRV_P = 4
the other STEER2SRV parameter I keep as written in the manual.
The start an landing was ok, but I think the values are not the real one as I use the internal barometer for the height control. Due to the effect of air pressure disurbances during takeoff (a EDF need a lot of air volume and parts of this volume is sucked through the fusselage to cool the Lipos) the barometer show a value from 70m not even left the runway. So the ground steering was inaktive from the begin.
So next test will be done with the GPS as height source or a external barometer outside from the distrubances.
Basicaly a old problem.
At the takeoff the value of the ATT.Yaw is very close on the real course of the runway. The GPS.GCrs is about 30 deg wrong. During the flight and the final landing they are very close togehter and the value is correct to the runway.
How far I could reduce the value from EK2_YAW_M_NSE?
 .
.